 美的运动控制让机械采摘升级更优化
美的运动控制让机械采摘升级更优化
当自动番茄采摘车遇上Servotronix的创新方案会碰撞出什么样的火花?
新一代自动番茄采摘车,多用途GRoW触发新需求
GRoW(Greenhouse Robotic Worker)是一款用于温室中劳动密集型任务的多用途机器人系统。据以色列GRoW制造商METOMOTION评估,使用GRoW可减少50%与收获相关的劳动力成本,并可在三年内达到种植者的投资回报率。
在GRoW进行选择性机械收获温室番茄的应用中(自动番茄采摘车),客户现有的机器人解决方案使用了标准PUMA机器人,限于PUMA运动学的标准其可达的工作范围有限,无法达到扩展的高低拾取点。客户期望能增加应用程序的运动范围,覆盖果实采摘区域的整个高度,即达到最大延展半径约1.5米;同时要求具备IP65的防护等级以应对恶劣的农业环境条件。
自动番茄采摘车第一代(PUMA机器人)
全新理念破解采摘范围难题
秉持着提供高质量产品、低成本效益的解决方案及按时交付的原则,Servotronix的运动系统团队提出了全新的可定制化笛卡尔直角坐标系统设计理念,能完全取代PUMA机器人;依托Servotronix softMC 703平台及其他机械部件对自动番茄采摘车进行了性能升级与功能优化,以满足客户个性化需求。
系统组成部分
1. softMC 703 CANopen控制5轴直角坐标运动 + 1个夹具控制
2. CDHD2-006 x 3轴(Z、2、3)
3. stepIM Nema 17 IP20 x 2轴(4、5)
4.带制动器的科尔摩根AKM31和22电机 x 3轴
5.Sesame星齿轮头 x 4轴(2、3、4、5)
6.Z轴(皮带)的Thomson线性滑块
7.机柜 + 编织控制柜
Servotronix演绎低成本下的高性能
经过Servotronix创新升级后的自动番茄采摘车具体有着怎样的性能特色呢?
性能特色
在保持原有工作速度的同时达到了更完整的拾取运动范围,增加吞吐量;
定制化机器人的成本比之前使用PUMA手臂低50%;
使用stepIM来简化路由、减少组件和总体重量,将机器人重量降低了约50公斤;
实现了IP65 防护等级,设备使用更加安全高效。
此外,Servotronix也是唯一一家提供个性化定制机器人以满足GRoW用户特定需求的供应商,而不是仅仅供应不同类型的标准机器人。
新一代自动番茄采摘车改变规则的Servotronix解决方案
Servotronix softMC 703平台是开放的,也是灵活的,易于控制不同类型的运动学和辅助轴,包括客户自己的夹具和驱动轮。这种灵活性将保证客户能够控制额外的机器人和免费的服务轴,如夹具、装载库、输送机和车轮驱动装置,且无需添加其他控制器。
一直以来,Servotronix都根据客户要求设计开发运动控制方案,致力于为行业领先的设备制造商和自动化系统供应商提供可定制化运动控制解决方案。这一套由Servotronix提供的完整的交钥匙解决方案,享有Servotronix的品牌名称和保修服务;所有零件号和图纸都由Servotronix发布,为客户添加了整个系统的所有权价值。客户信任Servotronix作为其机器人的运动中心和运动伙伴,Servotronix也将不负这种信任,继续以创新的研发理念、雄厚的技术实力竭诚为大家服务。
-
机器人
+关注
关注
206文章
26974浏览量
201300
原文标题:[机器人频道|物联网]美的运动控制让机械采摘升级更优化
文章出处:【微信号:robovideo,微信公众号:机器人频道】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【开源获奖案例】四轴机械臂控制系统

伺服位置控制模式往复运动中,在换向时响声大,机械震动如何消除?
开源七轴myArm协作机械臂正逆运动学技术讲解

【IoT毕设】机智云平台+STM32+树莓派的草莓采摘机器人控制系统
【IoT毕设】机智云平台+STM32+树莓派的草莓采摘机器人控制系统
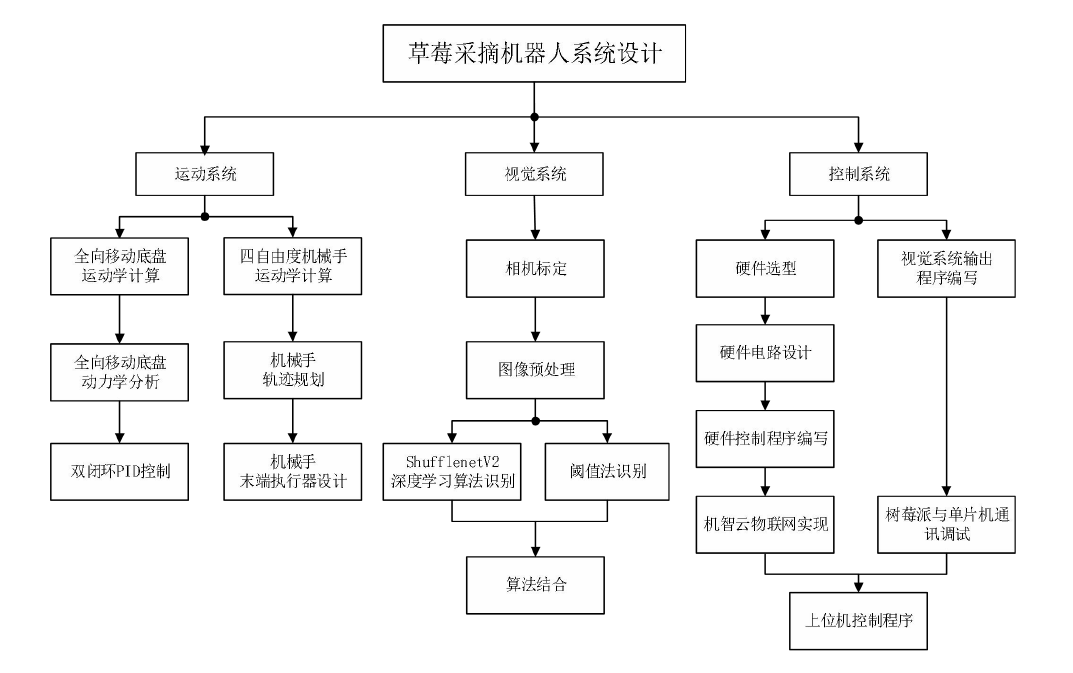
机智云物联网云平台+STM32+树莓派的草莓采摘机器人控制系统

ECI2608运动控制卡用户手册
ECI2618运动控制卡用户手册
IoT毕设 | 机智云物联网云平台+STM32+树莓派的草莓采摘机器人控制系统
可伸缩便携式刺梨采摘器设计

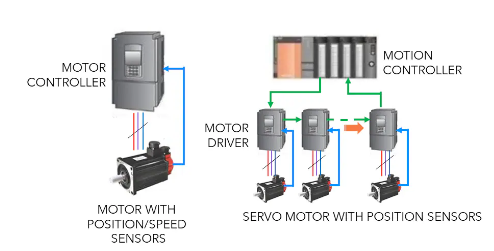
PLC与运动控制器的区别 运动控制器的工作原理

基于LabVIEW上位机以PWM控制16路舵机六自由度机械臂运动

如何从电机控制转换为运动控制





 工商网监
工商网监
评论