 马斯克再放豪言:任何使用激光雷达的自动驾驶公司注定失败
马斯克再放豪言:任何使用激光雷达的自动驾驶公司注定失败
4月23日消息,特斯拉昨夜于美国总部举行自动驾驶主题日活动(Tesla Autonomous Day),向到场投资者以及全球观众直播发布了预热已久的特斯拉“全自动驾驶计算机”(full self-driving computer,以下称 FSD 计算机),即之前所说的 Autopilot 硬件 3.0。
这款自研芯片于一年半前设计完成。从公布的一系列的参数来看,无疑是相当强大的一款硬件:144TOPS(完胜竞争对手目前最先进技术 21TOPS ),神经网络加速器(NNA)达到令人难以置信的 2100FPS,将由三星代工生产,采用14nm工艺,功耗仅为72W,并且已经在目前新生产的特斯拉旗下车型中搭载。此外,特斯拉明年部署无人出租车队。
马斯克:“这是全世界最好的芯片”
“乍一看似乎不可能——从来没有设计过芯片的特斯拉怎么能设计全世界最好的芯片?” 马斯克在活动上说,“但这确是客观发生的。它领先的程度不是一点,而是遥遥领先。它现在就安装在这些汽车里。”
马斯克一边夸下海口,一边让特斯拉Autopilot工程团队进行详细展示,该团队过去几年一直在全力以赴达成其老板的激进目标。他最新的预测时:特斯拉的无人驾驶汽车将在明年上路,在完全无需人类协助的情况下,通过所谓的机器人出租车队运营。
特斯拉大约一个月前开始放弃英伟达的芯片和无人驾驶电脑,转而在Model S和Model X中使用自家技术,大约10天前开始在Model 3中采取同样的措施。三星电子将负责为该公司代工这些芯片。
英伟达则反驳了特斯拉的一些声明,认为这家电动汽车公司把一整台电脑的性能跟一个芯片进行对比。他们认为,采用多个英伟达芯片的完整系统比特斯拉展示的系统更加强大。
不过,英伟达还是盛赞特斯拉,称其“抬高了无人驾驶电脑的标准”。
如何实现完全自动驾驶?
特斯拉到底声称的“完全自动驾驶功能”是如何实现的?毫无疑问,硬件+软件,两块缺一不可。
用马斯克自己的话总结就是:“特斯拉在其自动驾驶软件和硬件的开发方面取得了重大进展,包括我们的 FSD 计算机,该计算机目前已投入生产,并将通过未来的软件更新,实现全自动驾驶”。
特斯拉硬件工程副总裁 Pete Bannon介绍了特斯拉的最新成果——自动驾驶计算机系统,以及自动驾驶芯片。
按照 Pete 介绍,在这个电脑系统里,它包含两个完全独立的全自动驾驶(FSD)包,这一蓝一绿两台芯片组上的神经网络,会交换关于驾驶计划的各自独立的版本,“它们会确保只有在独立得出的结果相同时,才会行动并驾驶汽车,以确保安全。”
虽然,可能略显多余,但此举是为了确保自动驾驶系统的正常运作,以及保证安全性。马斯克补充到,“这意味着任何一部分即使可能失败,但汽车仍将继续前行。”
毫无疑问,最大亮点就是上面加载的这款自动驾驶芯片了。
用 Pete 的话说,芯片最大的亮点,莫过于新芯片上的神经网络执行器,它可以处理来自特斯拉车身8个不断运行的摄像头,每秒大约2100帧的输入图像,相当于每秒25亿像素。Pete 认为,这已经足以覆盖日常行车当中对图像的更多需求了。
那么放到现实世界中的特斯拉来说,到底意味着什么呢?Pete 表示,自动驾驶硬件3.0版是“世界上最先进的自动驾驶计算机” ,与上一代硬件相比,它的功耗提高了大约1.25,整体成本降低了80%。马斯克补充表示,FSD 每英里的功耗约为250瓦。
这个数字是个什么概念?丰田研究所负责人Gill Pratt 接受 IEEE Spectrum 采访时透露,人类大脑的功耗只有50瓦,但真正留给驾驶时的功耗,大约是10瓦,然而,大部分的自动驾驶系统功耗可以高达几千瓦。
在发布会上,特斯拉已经确认,这款全新打造的自动驾驶计算机,已经正式投入到现有 Model 3、Model S 以及 Model X 的生产当中。
马斯克:谁用激光雷达谁完蛋!
马斯克再度发出豪言:“任何使用激光雷达的自动驾驶公司注定失败(doomed)”。
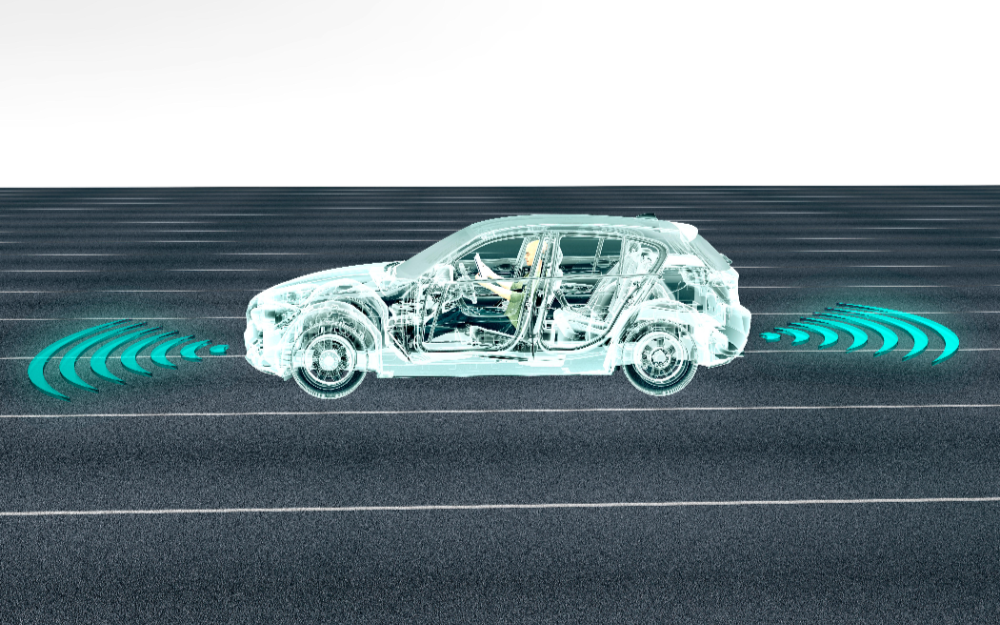
传感器就是以视觉技术为主导的,主要通过摄像头+毫米波雷达的组合实现相关功能,相对更经济、性价比高一些。而像谷歌 Waymo、百度等致力于无人驾驶汽车公司,则以激光雷达为主导,相对成本较高,但在精度上更胜一筹。
(Lidar 眼中的世界,图自 Ars Technica)
可以说,目前绝大多数致力于自动驾驶汽车的公司,采用的都是激光雷达。当然,激光雷达也有不足,比如无法区分颜色,红绿灯在它眼里看来就没什么区别。
在现场投资人提问环节,不可避免地提到了激光雷达的好处,以及摄像头流派所面临的难题:那就是雨雪天气,路况不好时,摄像头如何避免精度不高的问题。
对此,马斯克的回答是,虽然雨雪天的确会增加驾驶难度,比如路牌被雪遮住一部分,但人类通过视觉能做出判断,并且相对安全地驾驶,那么经过大量充分训练的神经网络同样也可以做到,并非一定要靠 Lidar。
用马斯克的话说,“(在汽车上放)激光雷达就是一个傻瓜”(a fools errand),甚至在发布会上发狠话说,自动驾驶行业谁寄希望于 Lidar、谁就一定会完蛋(doomed)!因为激光雷达昂贵、不必要,也很荒谬,注定要让人失望。
这位 AI 大牛在特斯拉的主要工作是训练 FSD 以及神经网络信息处理。Andrej Karpathy 的现场演讲展示了早期将神经网络部署在真实世界中训练的重要性,比如说,特斯拉的每一位司机其实都参与到了神经网络的训练中,每一个新手都将为特斯拉的自动驾驶系统喂入新的数据。而且,Karpathy 认为,在神经网络的训练中,和数据的规模相比,数据的质量更加重要,特斯拉的原始数据集也可能是全球最有价值的,因为特斯拉拥有全球范围的车队,可以提供各种环境、天气条件的数据,还会收集车辆的异常道路表现数据。在数据的标注上,特斯拉也正在尝试自动化标注的方向。
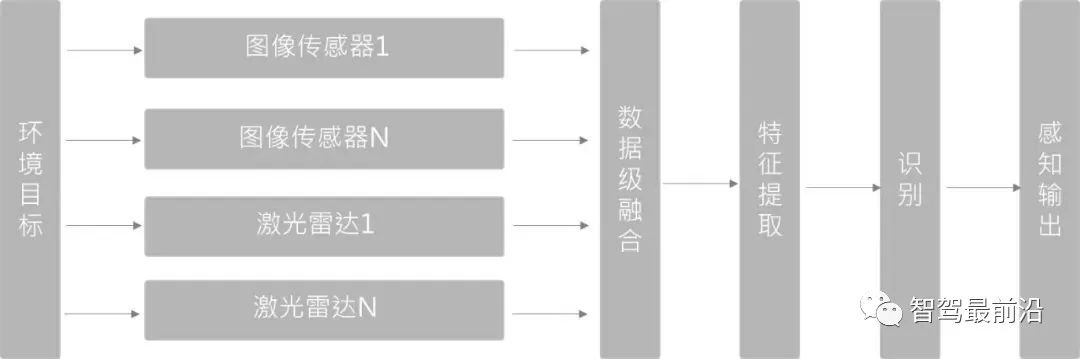
Andrej 强调特斯拉非常依赖视觉传感器,特斯拉的 AI 软件能够处理来自视觉传感器收集到的车道线、交通、行人等信息,将这些信号与已知的物体进行匹配再最终作出决策。
发布会上,特斯拉人工智能和自动驾驶视觉总监 Andrej Karpathy 罕见登场。这位李飞飞的高徒在斯坦福 AI 实验室攻读博士期间就已声名远扬,后加入 Open AI,特斯拉正是看中他在计算机视觉领域内的深厚技术积累,才将其任命为人工智能部门主管。
他同样对比了激光雷达(Lidar)方案和计算机视觉方案的优劣,而且显然也和马斯克一样是计算机视觉派:“某种意义上,Lidar 是一个捷径。它回避了对自动驾驶非常重要的视觉识别基本问题,给人一种虚假的技术进步了的感觉”。他表示,和 Lidar 相比,特斯拉更加依赖计算机视觉,并将收到的视觉信息进行 3D 渲染,涵盖视频输入到深度感知。
也就是说,特斯拉认为,摄像头+数据+神经网络,足以挑战 Lidar。如此认定计算机视觉嫌弃 Lidar,这种选择现阶段这在业内也非常罕见,绝大多数业者还是采用 Lidar 的方案或者 Lidar+计算机视觉,因为目前的纯计算机视觉方案在安全性的保障上仍有一定风险。
明年推出Robotaxi
在发布会最后,马斯克也顺势提出了 Robotaxi 的概念,即特斯拉的机器人汽车。马斯克说,从2016年起,就在讨论机器人汽车的概念。马斯克表示,“非常有信心”在明年推出 Robotaxi 计划,但不是所有地区,因为要考量监管因素。
-
激光雷达
+关注
关注
961文章
3643浏览量
186630 -
自动驾驶
+关注
关注
773文章
13022浏览量
163186
原文标题:再见英伟达!特斯拉称已开发出最强自动驾驶芯片!
文章出处:【微信号:xinlun99,微信公众号:芯论】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
马斯克称特斯拉自动驾驶累计投入将超百亿美元
阜时科技近期签订商用车自动驾驶全固态激光雷达批量订单
激光雷达的应用场景
硅基片上激光雷达的测距原理

宝马发力L3自动驾驶,摩根大通看好,激光雷达公司再迎暴涨

激光雷达和毫米波雷达的区别 哪个才是自动驾驶感知的最优选择?

一文通过AEC-Q102车规级芯片测试认证了解激光雷达核心技术及行业格局
马斯克直播自动驾驶去扎克伯格家
补盲激光雷达,照亮自动驾驶隐秘的角落
激光雷达是什么 激光雷达介绍
辅助驾驶技术再升级,自动驾驶上下游共同发力补盲激光雷达
一文读懂自动驾驶的激光雷达与视觉融合感知
自动驾驶中激光雷达如何检测障碍物

自动驾驶传感器中如何现在激光雷达和毫米波雷达?






 工商网监
工商网监
评论