 “突破性能和功耗极限--新一代自动驾驶处理器助力自动驾驶产业化”的演讲
“突破性能和功耗极限--新一代自动驾驶处理器助力自动驾驶产业化”的演讲
地平线在年初喜获6亿美元融资,更让人瞩目的是,2018年地平线产品开始落地,AI芯片产品的出货达到数十万,2018营收达数亿元。2019年预计芯片整体出货可达百万量级,整体营收会有数倍增长。
2019第四届ADAS与自动驾驶论坛于3月21-22日在上海召开,论坛由CCIA智能网联专委会与佐思产研主办,地平线、纵目科技、中科慧眼、中电昆辰、富兰光学、创景科技等单位支持。
地平线市场拓展与战略规划副总裁李星宇在论坛上发表了题为“突破性能和功耗极限--新一代自动驾驶处理器助力自动驾驶产业化”的演讲。以下是演讲全文。
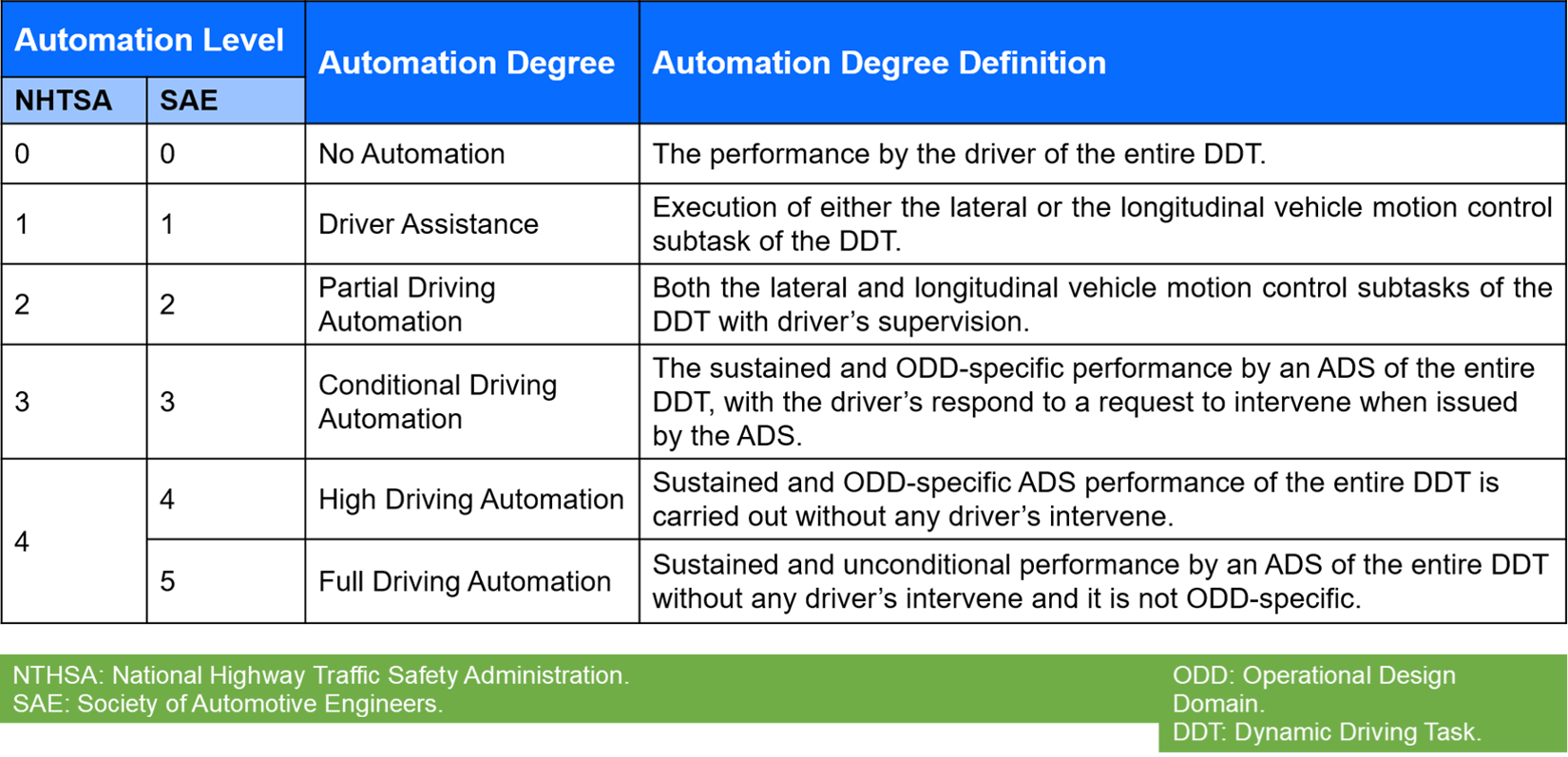
目前, 业界的量产车型还在L2级别的ADAS阶段,但是主机厂已经在全力以赴推进L3、L4的开发。在开发过程中,主机厂在计算方面面临非常大的难题,就是算力不够。我们来看现在主流的需求,自动驾驶等级每升一级,就需要约13倍的算力提升。
算力的饥渴来自哪里?现在大部分算力用在感知,但是感知只是第一步,而且是算力要求最低的一步。往更高级别走需要融合,融合就需要建模,同时还要做预测,再往后需要基于人工智能和规则的混合决策,这些都需要更高的算力。
很多人在谈到自动驾驶芯片的时候,会问你们家芯片算力到底是多少?如果我们停留在讨论多少T的算力,是不是能代表实际功效呢?事实上,我们要考虑算力有效性是怎样的,这里的有效性指从经济和性能角度衡量AI计算。首先算力利用率如何?接下来要考量功耗如何?计算成本如何?最后也是最重要的,就是把AI的算力转化为AI输出的效率,这是多维的目标输出,包含目标数量、准确性等。我们要更加全面的衡量实际效能,才能够真正评判一个自动驾驶处理器的有效性如何。

大家知道卷积神经网络有大量中间数据产生,这里的关键是如何合理调配内存、外存的网络和计算单元之间的通路,如果不能得到充分的调配,那计算单元的效力也发挥不出来。为了解决这样的瓶颈,地平线巧妙设计了计算构架与存储器访问控制器,使它做到精确的匹配,通过这样一种协同的设计,就可以达到极高的利用率,并且能够将功耗控制在有效的足够低的范围内。

地平线通过把算法、计算构架以及工具链的协同,让BPU能够提供比GPU高30倍的性能。我们2017年年底发布了第一代BPU芯片,2019年会推出第二代芯片,有十倍性能的提升,车规级的设计。
我们还提供配套的开发平台Matrix,在今年CES 上Matrix获得了创新大奖,Matrix现在版本还是FPGA来构建,之后会替换成第二代的处理器,主要能力体现在视觉感知方面,通过BPU进行算法加速,支持多目标识别以及全景语义分割。

在语义分割里面,把斑马线、红绿灯、行驶区域全部通过伪彩表现出来(视频播放)。通过不同组合,可以做到很好的360度短距和长距的全覆盖。很多人会说,这个芯片只适合做视觉处理,其实不是,同样适合做激光点云的目标识别。这样使得我们未来很容易做到激光和视觉的融合识别,同时它有很高的可靠性,且有更好的吻合度,因为激光雷达有深度距离上的精准测量,加上视觉的颜色信息,可以构成非常精准全面的信息输入。
刚刚提到算法和架构的协同设计。这里有一个基于地平线第二代BPU架构和某主流芯片的效能算法对比。我们跑了老的算法比如Resnet,地平线BPU2.0有它的优势,但是不明显,当逐渐过渡到最新的算法,比如MobileNet-V2的时候,我们发现效能剧增。实际上这种Depth-wise的算法要求计算构架同步进行更新,如果还是原来的大规模并行计算构架,就不能很好发挥计算单元的效果,使得算力明显下降。这是很有说服力的结果,如果不能把计算构架和算法结合的话,很难发挥好的效果。
地平线提供深度学习的算法和处理器,同时我们保持足够的开放度,提供开放的工具链,去支持客户已有的算法。因为我们面对的驾驶环境足够多,地平线的算法模型不可能在每个维度上都可以覆盖到,尤其是面向不同场景的模型。所以我们提供了工具链,能够使客户在标准算法框架下,通过我们的模型转化工具,将客户的模型适配到我们自己的算法,转化成我们的芯片可以执行的非常高效的runtime。

地平线提供全栈感知软件和全栈工具链。现在作为一家芯片公司,要做的不仅仅是AI芯片的开发,更大的工作量是构建全栈的工具链以及底层软件。现在全球有超过70家初创公司做AI芯片,但是真正具备强大工具链开发能力的公司并不多。另外,我们还需要考虑在全栈软件开发上,都需要符合主动安全标准,这是更大的挑战。
在过去几十年PC发展史里面,虽然没有深度学习,但从本质上讲,都是在提高性能、降低功耗。传统的计算构架的积累,经典的方法论已经非常成熟了,地平线通过把经典理论和深度学习算法结合,最终也能达到非常好的效果。比如我们通过指令和数据存储的巧妙组合,使得数据存取/指令执行可以并行进行,进一步提升整个系统的执行效果。
接下来再看另外一个创新成果Navnet,这是业界第一次基于视觉的实时3D定位和语义地图构建Solution。我们基于单目的前摄像头,可以进行视觉点云的重建。过去如果进行点云重建都是用激光雷达,非常昂贵,Navnet提供了非常低成本的解决方案。点云定位的优势在那里?非常稳定。另外还可以基于点云提取语义,很好把点云进行参数化,提取必需的地图元素。
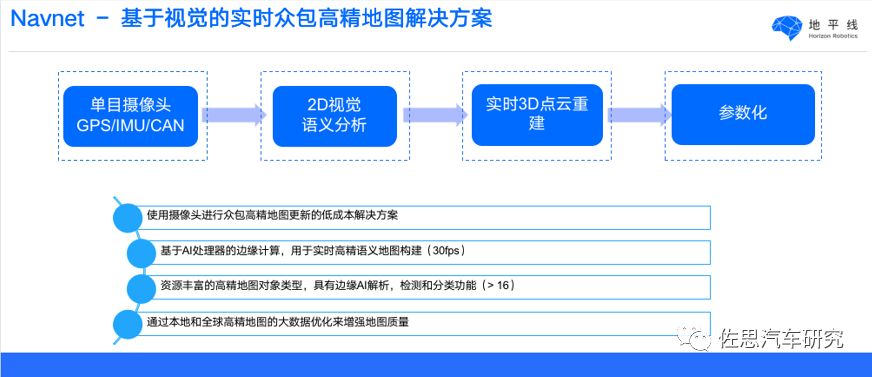
这样的低成本的解决方案,意味着可以做大规模的众包建图方案实施。我们第一次把这样的方案放在廉价的边缘计算设备上进行,使得我们对地图元素的采集非常方便,包括标识牌、人行横道、车道线、红绿灯、路灯等构成一个高可靠性的,3D实时语义地图,使地图有实时更新的能力。
我们可以提供后装的解决方案,未来结合ADAS,可以变成前装解决方案,大规模地采集数据,能够在云上进行实时的监控,并且把数据传回到云端,如果车辆覆盖密度足够高的话,我们可以大大优化地图的精度,再推送到车辆,形成一套完整的闭环解决方案。
Navnet的输出可以分为多层,可以直接输出点云,也可以输出结构化的语义信息,而语义地图的输出吞吐量是很小的,不到100K。
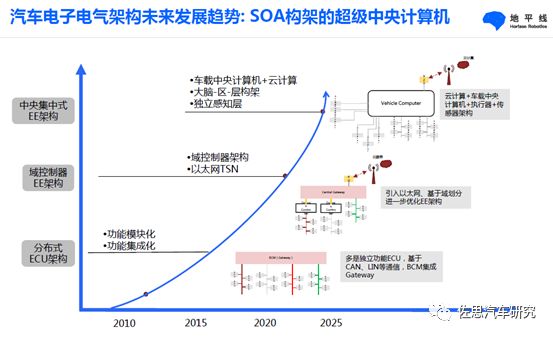
最后分享一点对于业界最新趋势的观察,我们看到过去传统的分布式ECU构架逐渐集中化了,这样过程中会有过度阶段,比如说多域控制器,还有域控制器之间的融合,逐渐演进。
过去的分布式的EE架构,使得软件开发更新特别麻烦。同时,如果今后还是分布式架构,为了达到功能安全的要求,所有的传感器都要两套,成本太高了。通过这种高度融合的方式,形成单一的中央计算机,加上感知层、执行区这样的概念,可以充分的利用已有的技术,在上层增加非常多的安全路由,可以动态调配集成资源,每个集成资源都可以共享多个资源和机组,这很像人体的架构。
在未来还会和云端结合,形成一种端云结合的协同式决策感知解决方案。这样一种新的体系构架,事实上对感知能力提出了更高要求。
如果我们只是做L2级别ADAS的话,可能只需要关注目标识别就够了,不需要那么强的感知能力。如果我们放到新的构架下,它对感知能力需求就会变得非常高,而且要求感知能力要持续提升,所以未来,当我们部署一套硬件设备以后,它的能力需要持续的进化,我们需要持续不断迭代它的软件,进而为未来的各种各样应用开发提供非常好的基础层。
这样的构架下,事实上对智能驾驶的芯片整体能力又提出了新要求,比原来面向单一功能要求高得多。所以这也是为什么地平线持续提升感知维度的根源所在。
自动驾驶如果真正要落地,面临无数的问题,我们希望和在座的朋友一起,携手并进,把这件事情落到实处,谢谢各位!
-
芯片
+关注
关注
446文章
47769浏览量
409066 -
人工智能
+关注
关注
1776文章
43824浏览量
230574 -
自动驾驶
+关注
关注
773文章
13027浏览量
163199
原文标题:2018地平线芯片出货已达数十万,新一代处理器助力自动驾驶产业化
文章出处:【微信号:zuosiqiche,微信公众号:佐思汽车研究】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
未来已来,多传感器融合感知是自动驾驶破局的关键
LabVIEW开发自动驾驶的双目测距系统
自动驾驶“十问十答”

农机自动驾驶显示系统组成部分以及配置
【KV260视觉入门套件试用体验】八、VITis AI自动驾驶多任务执行MultiTask V3
MPS自动驾驶产品满足日益复杂的自动驾驶系统需求
自动驾驶芯片的低功耗设计

车路协同式的自动驾驶(VICAD)

自动驾驶产业链全梳理
自动驾驶基础架构
车路协同自动驾驶数据集DAIR-V2X







 工商网监
工商网监
评论