 四旋翼无人机设计很难吗?看张飞老师如何解读
四旋翼无人机设计很难吗?看张飞老师如何解读
套餐介绍
购买须知:
1、成功购买后:请添加客服小姐姐的qq:1126680104,添加时请备注姓名+已购买无人机,
2、添加成功后:
①提供订单ID(哪里找:支付成功页面的详情)、姓名、手机号、邮箱、收货地址
②客服小姐姐拉你进无人机千人交流群
3、关于发货:1)如何发货:①视频发送至邮箱。
②硬件寄出后,客服小姐姐会提供单号
2)发货时间:购买成功提供信息后,3-5个工作日安排发货哦
???我有疑问:请添加客服小姐姐的qq:1126680104,添加时请备注咨询无人机
什么是开源?
开源软件:众所周知,所有的软件都用源码编写,并通过编译最终生成系统或应用。开放源码软件保证所有人可以得到这些代码。
开源硬件:开源硬件是开源思想的继承者。这些硬件的开发者将硬件的全部资料都对外公开,包括电路图、PCB、BOM、结构图等等。
开源带来的方便
随着互联网的飞速发展,工程师的学习途径越来越广阔方便。在网络上都能找到一些免费的开源项目,另外还有商家售卖的一些开源的开发板供工程师学习提升技能。
开源开发板的现状与弊端
现状:目前市面上的开发板都是把单片机的各功能模块拆解开来去教学,开放源代码给工程师,工程师可以去编写自己想要实现的功能从而提升技术。这对于部分工程师确实有一定的帮助。
弊端:起点高,只有丰富经验有基础的工程师才能真正学到点东西,对于初级工程师而言仍然不能很好的学通,这是一个硬伤。把代码开源了,你能读懂每行代码和各种细节吗?把原理图、PCB、BOM都给你能懂透硬件功能是如何实现吗?显然答案是否定的,他们学习后依旧不具有项目的系统观念,不知软硬件如何配合,更不知道如何独立完成一个软硬结合的实际项目。殊不知刚入门的初级工程师或者学生更是急迫需要学习的群体。
开源需要讲透:
张飞老师鉴于以上问题、深知初学者的学习痛苦与困惑,结合自己十多年的研发经验,始终坚持从初学者的角度出发,基于实际项目甚至实际产品用“视频教程”的方式来诠释软硬件开发的核心技术,逻辑清晰,通俗易懂。
在开源的基础上进一步的把软件代码一行行一步步实现的原理,马达驱动的控制,硬件电路图的构思与绘制,PCB板layout的过程与细节,软硬结合的知识体系,产品从调试到成型到批量生产的经过,另外还把自身多年研发经历中遇到的坑,用视频的方式倾囊讲述。彻底打通初学者的一切顾虑,在极短的时间内掌握项目研发要领,让新手也能做一个完全属于自己的软硬综合项目。
为什么选择无人机项目来教学?
因为无人机项目具有几大很大优势,细述如下
1、长久以来,一直存在着软硬之争,究竟学软件好还是硬件好?谁更有前途?谁工资更高?
软件硬件非得要一决高下,确实很难定论。
在工作中往往有个很普遍的现象,一旦项目出了问题长时间无法解决时,软硬件工程师相互推责任,更加导致项目进展缓慢,形成恶性循环。往往都是公司软硬通吃的大咖找出原因解决问题。
从项目的角度来讲:张飞老师通过自身的经历告诉大家,硬件学的好依旧可以学好软件,他们本质上是一家,是不可分割相互依赖而存在的。两者学好更有利于项目的综合把控。
从个人的角度来讲,无论是吃软不吃硬还是吃硬不吃软,都很容易遇到瓶颈期,如能软硬兼施自然发展空间更大,更有前途或钱途。
2、无人机是系统的工程项目,具有开发板不具有的优势,能培养初学者系统架构的能力。
3、无人机是一个数模混合软硬结合的项目,通过无人机项目的教程,既能学到模拟电路的设计也能学到模数之间的转换和配合,更能学习到软件代码的编写,另外对于电路板layout的提升也有极大帮助。
4、无人机集多种传感器与一身,无人机技术与当前最火的人工智能、物联网技术是相同的,更符合当前技术潮流和趋势。
5、无人机本身具有娱乐性和观赏性,相对于其他枯燥的电子技术项目而言,可以增加学员的学习兴趣,让学员在快乐中掌握电子研发技能。
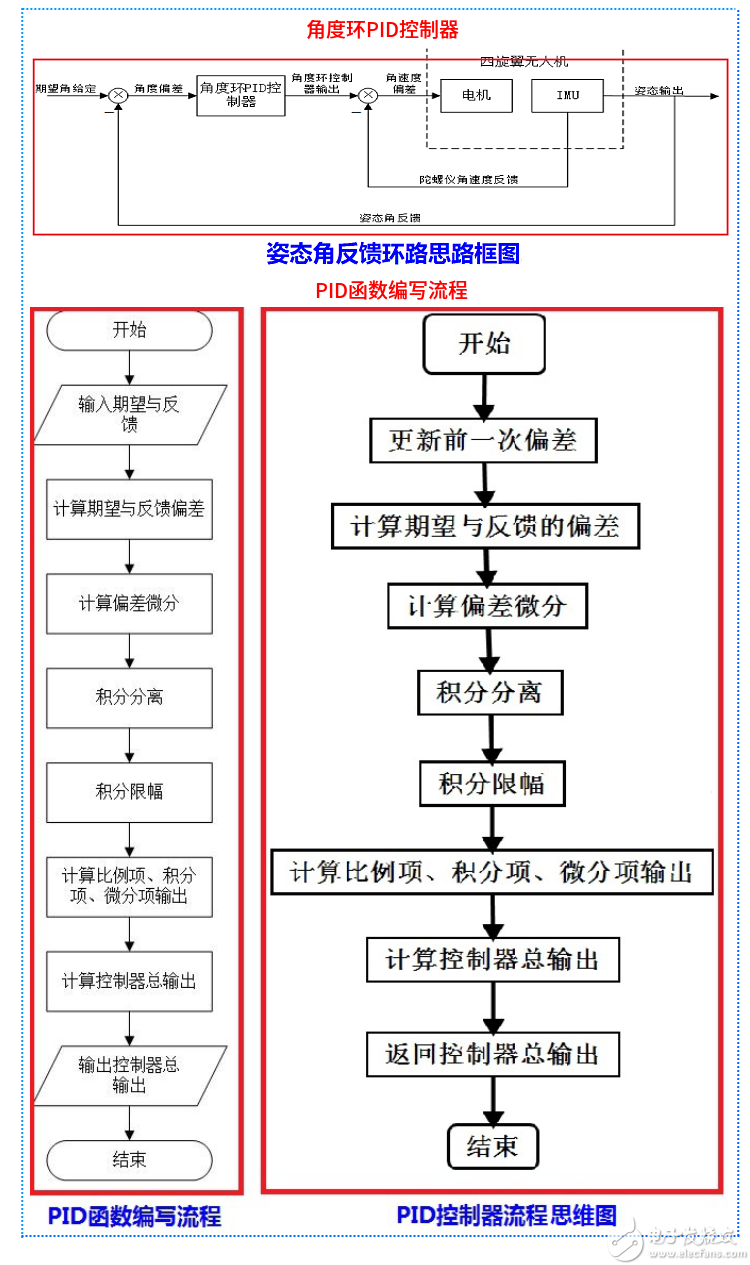
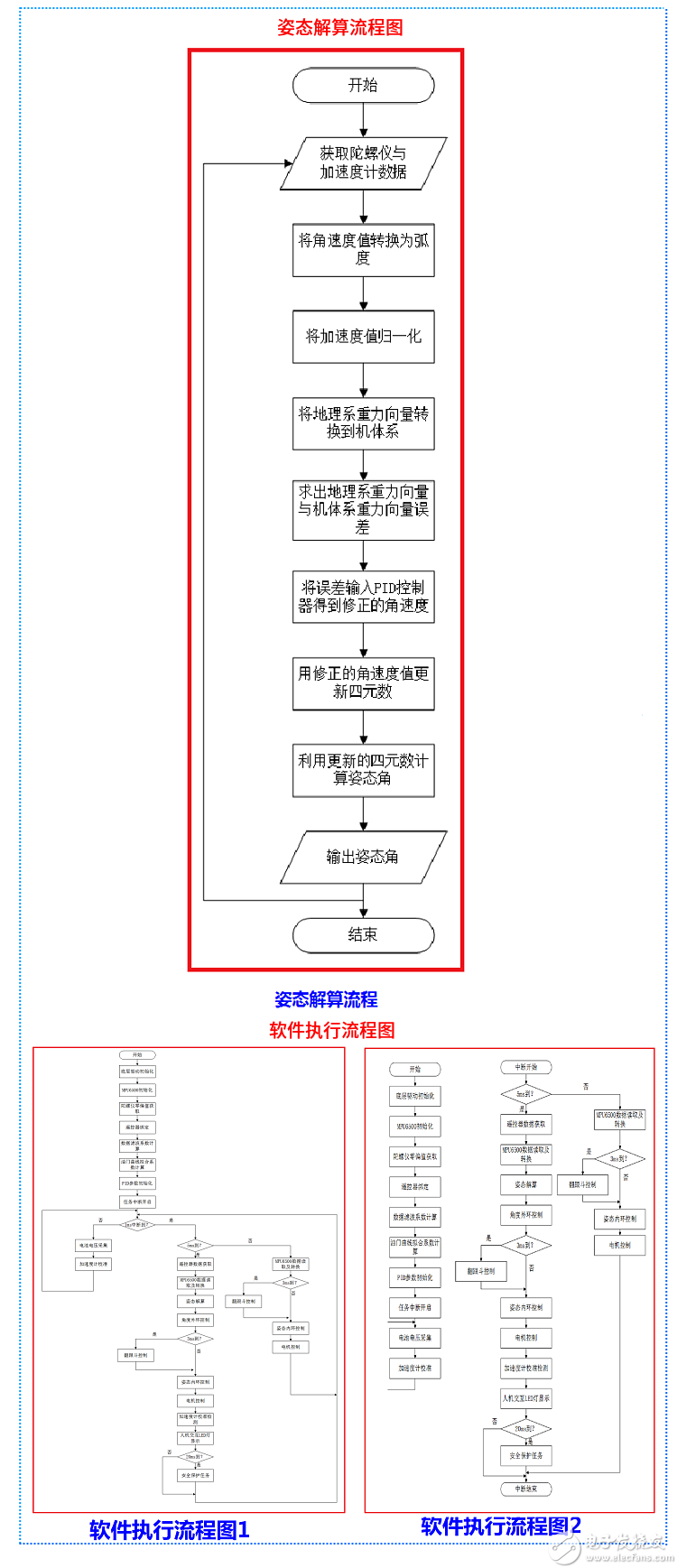
课程大纲
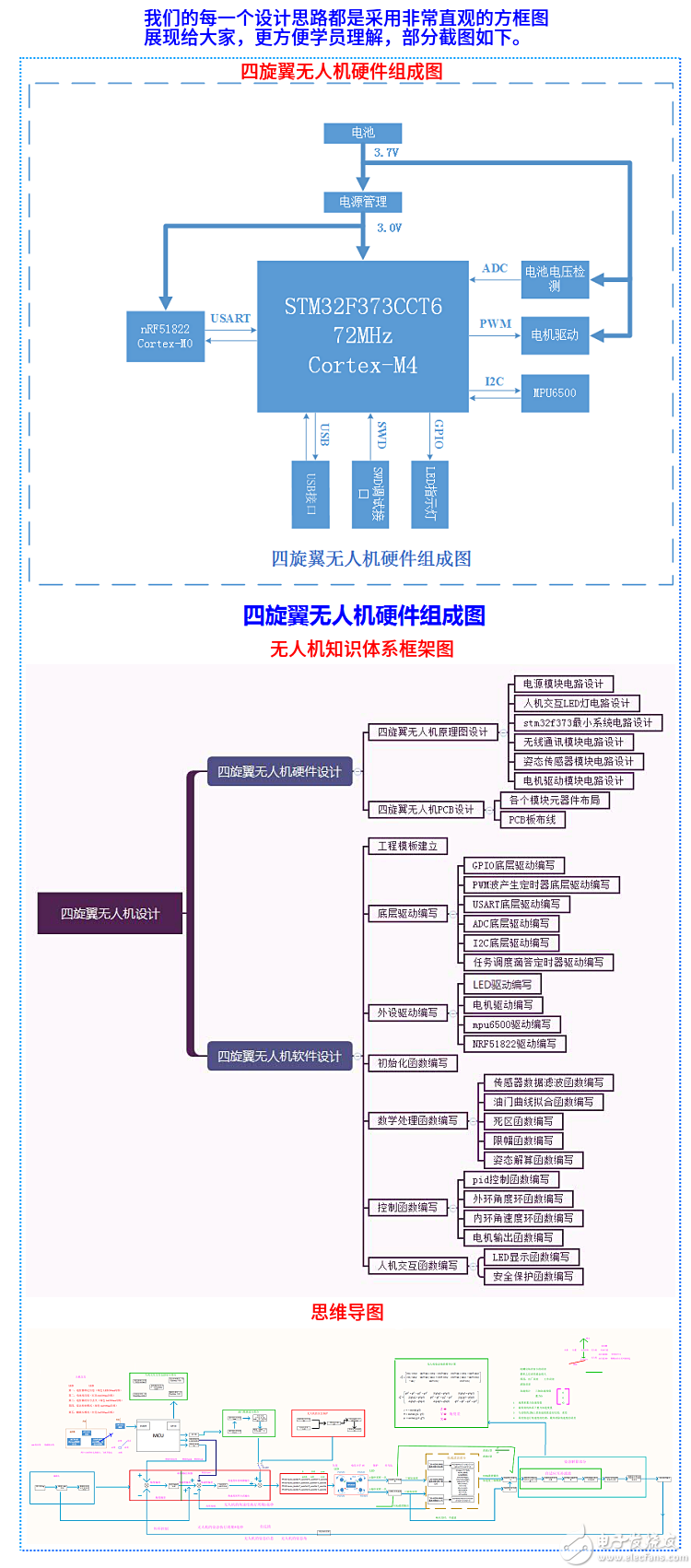
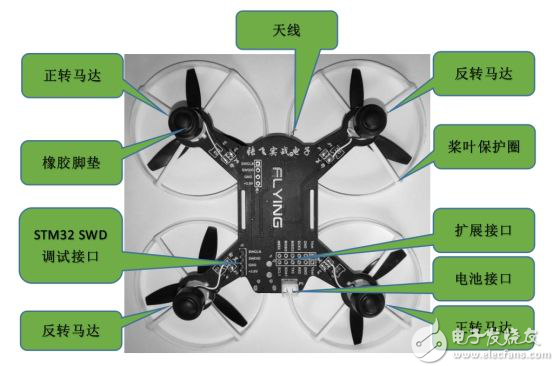
无人机项目做了哪些细节优化?


正面
反站
占地面
SD卡
关于四旋翼飞行器视频教程,我们后面还会针对更多的知识点详细讲解,部分举例如下(下方的东西此次拼团不包含):
气压计
电子罗盘
GPS
超声波
桨保
首先桨保是何物?当然是用来保护无人机桨叶的一个结构零件。市面无人机大多都无桨保,即使有桨保都是在是购买通用型的现成桨保,实际上会存在很大问题,比如会导致软件变量的调整难度特别大甚至根本调不到合适的点,从而飞行不稳。另外市面上通用型桨保容易变形,一旦变形后果可想而知,桨叶和桨保会打架。我们为解决这个问题,在结构上经过大量的研究,进行了全面的创新,并且申请了专利设计在市面上是独一无二的如下图
为了更好学习及利于飞行姿态的调整投入巨资独立开模。
桨叶
桨叶的学问有很多,本应该不同的飞行器桨叶结构都是有差异的,比如:桨叶的直径、螺距、功率以及实际应用中的损坏率等等。市面上大多是双叶桨,我们的桨叶针对此次实际项目的需要进行了独特设计并开模,采用三叶桨,极大提升效率”,另外对桨叶强度进行了优化设计减少了损坏率。张飞团队根据十多年的经验设计出了最匹配的桨叶。
市面上的无人机大多选用通用电机,对于微小的飞行器而言,空心杯马达是大多数的选择,然而电机和桨叶的配合又是怎样一个关系呢?电机分转矩型和高速型两种,如果选择转矩型马达,直径大、转速低、重量重,这就要求桨叶比较大,才能具有足够的升力,最终飞行器体积和重量必定急剧增加,续航时间随之缩短。高转速马达体积小,重量轻成为最常见的选择。不过通用型马达参数是固定的,由于四旋翼无人机对角马达转向相同,相邻马达转向相反,而空心杯马达正反方向旋转的寿命不同,不能满足最佳使用和飞行。此项目我们对马达进行了优化设计让各项参数完美匹配。
脚垫
大多无人机数并无脚垫,电机的轴是直接裸露在外面的,在多次起降后使电机轴发生微弱的偏心,致使电机发热最终损坏。
经过我们多次研究和实验设计出了重量轻、耐磨性强、减震性能优越的脚垫,更好的保护了电机,大大延长了飞行器的寿命。
手柄
为提升操控飞行的体验我们选择了手感很好的带外壳的
团队介绍
购买地址:http://t.elecfans.com/pay/index?topic_id=40
-
算法
+关注
关注
23文章
4452浏览量
90746 -
四旋翼飞行器
+关注
关注
18文章
76浏览量
40125 -
张飞电子
+关注
关注
52文章
175浏览量
12319 -
张飞
+关注
关注
17文章
3浏览量
8932
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论