 通过模仿沙漠蚂蚁的能力,设计出一种可以独立移动的机器人
通过模仿沙漠蚂蚁的能力,设计出一种可以独立移动的机器人
汲取沙漠蚂蚁的灵感,研究人员设计出一种可以独立移动的机器人,机器人能在没有任何GPS或地图的情况下返回基地,定位精确到1厘米。
不用GPS和地图,世界上最大的“蚂蚁”诞生了。
法国国家科学研究中心和艾克斯-马赛大学的科学家,通过模仿沙漠蚂蚁的能力,设计出一种可以独立移动的机器人,这种机器人利用“天体指南针”,能在没有任何GPS或测绘图的情况下返回基地。
机器人的能力模仿的是沙漠蚂蚁,这种蚂蚁使用地球的磁场进行定位,总能找到回家的路。
因此,科学家把这个机器人命名为AntBot,外形也设计成蚂蚁的样子。
模仿沙漠蚂蚁,定位精确到1厘米
目前,获取位置的方法多样,GPS是获取确定地球位置所需信息的主要方法,已集成到智能手机、手表和汽车上,但GPS在智能手机上的准确度仅为4.9米,误差相当大。
同步定位和制图(SLAM)方法广泛应用于自动驾驶汽车、行星探测器和无人驾驶飞行器,SLAM算法可以达到很高的精度,但是计算成本非常高。
激光探测和测距方法也提供可用于自动驾驶汽车和机器人的高分辨率地图,但缺点在于物理过载和高计算成本,最终导致高价格。
研究人员发现,沙漠蚂蚁导航能力超级强大,它们可以在强敌环伺的环境中觅食数百米,然后找到回家的路,最关键的是,沙漠蚂蚁并没有依靠上述任何一种定位技术。
这种非凡的导航天赋依赖于两条信息:一种是“天体指南针”测量的航向,一种是使用天空的偏振光的定位以及覆盖的距离。
距离和航向,是研究人员在沙漠蚂蚁身上学到的两个基本信息,也是AntBot机器人的两大基础。
AntBot复制了沙漠蚂蚁卓越的导航能力,它配备了一个光学罗盘,用于通过偏振光确定其航向,并通过一个光学运动传感器指向太阳来测量所覆盖的距离。有了这些信息,AntBot就像沙漠蚂蚁一样,能够探索它的环境并自行返回基地。
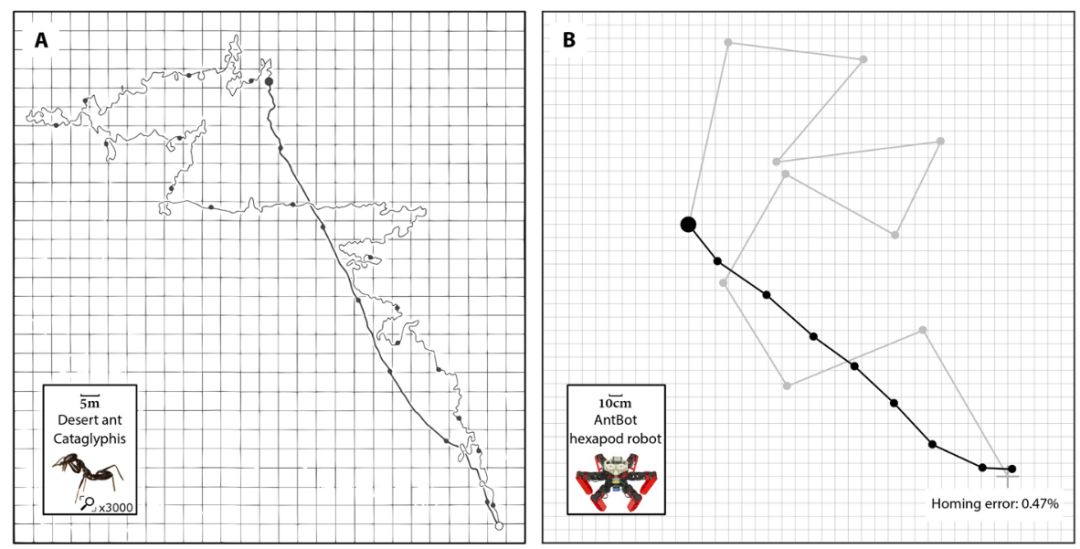
沙漠蚂蚁和AntBot的路径对比
研究人员让AntBot跑了14米的距离后发现,定位能精确到1厘米。
导航精确到0.4°,天体指南针自动适应光强变化
AntBot机器人重量仅为2.3千克,共有六条腿,每条腿有三个自由度,并且是完全由3D打印,可以达到约90厘米/秒的最大行走速度。机器人电子结构及其细节如下图所示。
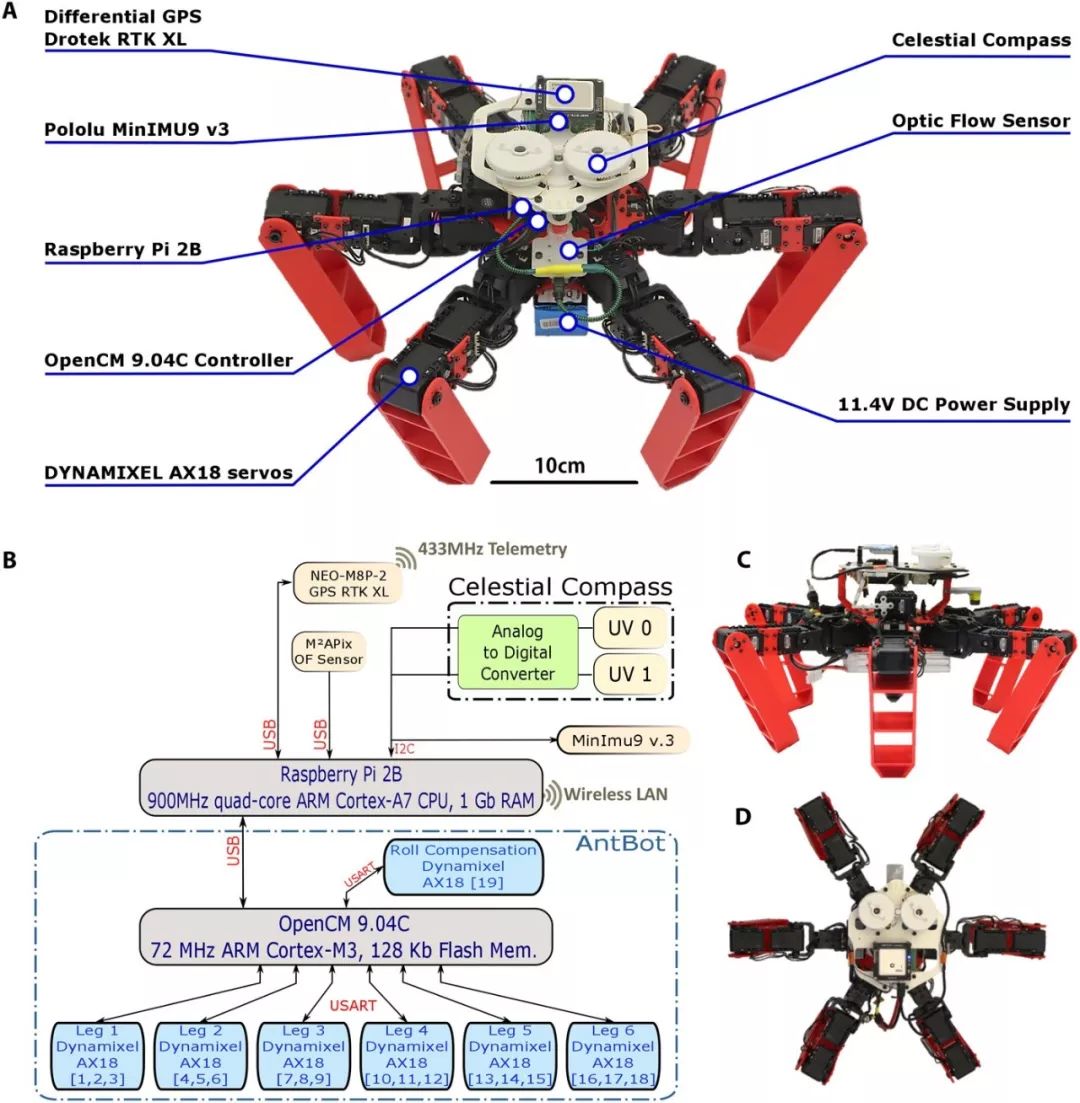
机器人最核心的技术是两只白色“眼睛”——天体指南针,以及 (米氏自适应像素)传感器。
(米氏自适应像素)传感器。
所有传感器和电子部件均由嵌入式微电脑(Raspberry Pi 2B板)控制,专用于传感器数据采集,数据处理和导航。
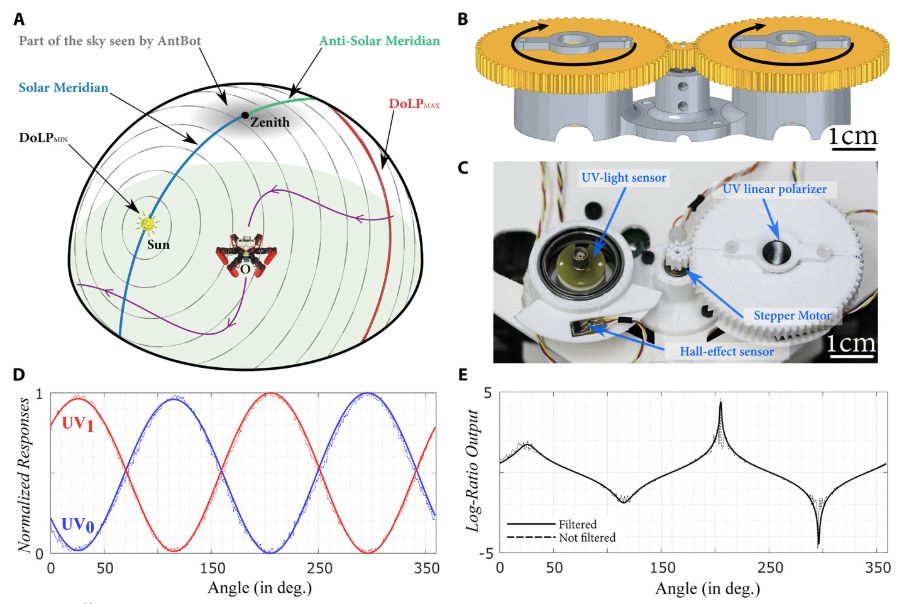
指南针的光学传感器总共只有14个像素,其中两个专门用于对紫外线敏感的罗盘。当将这一对与两个旋转偏振滤波器组合时,这个罗盘相当于由374个像素组成的两个阵列,每个阵列都调整到特定的偏振角。另外12个像素用于测量,能够自动适应光强的巨大变化。
实验结果显示,AntBot能以0.4°精度计算其航向,即使在多云的天气里也能实现行走和返航,这为自动驾驶和所有机器人中的导航颖策略提供了希望。
不过,目前机器人还不能长距离行驶,并且在没有光线的夜间情况下无法工作。
-
机器人
+关注
关注
206文章
26971浏览量
201289 -
gps
+关注
关注
22文章
2743浏览量
164264 -
无人驾驶
+关注
关注
97文章
3874浏览量
118957
原文标题:不用GPS和地图,世界上最大的“蚂蚁”机器人诞生了
文章出处:【微信号:AI_era,微信公众号:新智元】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
LabVIEW的六轴工业机器人运动控制系统
用全志R128复刻自平衡赛车机器人,还实现了三种不同的操控方式
高动态人形机器人“夸父”通过OpenHarmony 3.2 Release版本兼容性测评
基于ESP32开发的蚂蚁机器人方案






 工商网监
工商网监
评论