 深度分析无扫描激光三维成像雷达研究进展及趋势
深度分析无扫描激光三维成像雷达研究进展及趋势
1 引言
激光雷达广泛应用于航天、测绘、军事、民用等各个领域,其中三维成像激光雷达技术作为一种新型的成像技术,在20世纪90年代末就已提出,目前正处于快速发展阶段。三维成像激光雷达技术具有成像精度高、探测距离远、三维图像获取速度快等优点,在地形测绘、城市建模、公路检测等民用领域具有广泛应用;在武器制导、战场侦察、水下探测等军事方面具有重要作用;在空间交会对接、天体表面精准着陆、航天器在轨服务等航天领域发挥关键作用。
激光三维成像雷达按工作方式可分为扫描和无扫描两种体制。其中无扫描式激光三维成像雷达能对动态目标进行无失真成像,具有成像速度快、高帧频、高分辨率等优点,同时克服了扫描式体积大,质量重,可靠性差的缺点,在实时性和体积要求较高的空间目标相对导航应用中起着至关重要的作用,目前已成为许多国家研究的重点和热点。发展至今,无扫描激光三维成像激光种类繁多,发展现状不一。本文整理了闪光式、光子计数、增益调制型等7种无扫描激光三维成像雷达体制和距离选通成像技术国内外相关研究工作,追踪并归纳了其研究进展,并从核心器件角度分析其技术特点和发展趋势,以明确其未来可能的发展方向。
2 国内外研究进展
激光三维成像的本质是并行激光测距,按照测距方式可分为直接法和间接法。直接法测距的技术特点是利用面阵探测器直接测量每个像素点激光发射信号与回波信号的时间差,从而获得目标的距离像;间接法测距技术是将时间信息转换为可探测的物理信息如光强、振幅、频率、相位、偏振态、图像位置等,经过数据收集和逆转换处理,得到目标的距离信息。距离选通成像技术的实质是将对目标的空间扫描转换为时域扫描,适用于不同体制的激光三维成像雷达系统,是一种通用技术,总体分类如图1所示。
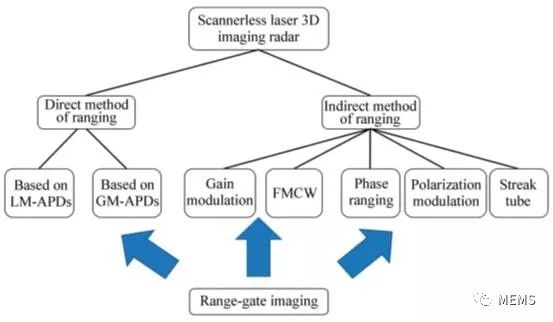
图1 无扫描激光三维成像雷达分类
2.1 基于LM-APDs阵列闪光激光雷达
2.1.1 工作原理
基于LM-APDs阵列的闪光激光雷达是典型的无扫描三维成像激光雷达。系统发射一个或多个脉冲激光,通过闪光成像的方式,获得目标的三维图像。脉冲发射后,同时触发时间测量电路,当回波光信号到达接收端后停止计时,便获得了脉冲飞行时间(Time of Flight,ToF)。其中时间测量可有距离计数器、高速A/D采样、利用激光器充电的时间幅度变换等多种方案。最大测量距离主要受激光脉冲峰值功率影响,测距精度受脉冲上升时间影响,最小测量距离受脉冲的半功率宽度影响。
2.1.2 国内外研究现状
1996年,美国空军研究实验室(Air Force Research Laboratory,AFRL)开展“闪光三维成像激光雷达”项目,并与雷神公司(Raytheon Company,RC)、先进科学概念公司(Advanced Scientific Concepts,ASC)合作研究。2009年,ASC公司生产的一款名为“龙眼”的三维成像激光雷达,采用128 x 128 InGaAs LM-APDs焦平面阵列,成像帧率为30 Hz,4 km远处测距精度为60 cm,利用该激光雷达完成了交会对接等空间任务。2011年,NASA开展了减轻猎户座相对导航风险用的传感器测试任务,ASC公司的闪光激光雷达在距离规定外成功追踪到目标。
该激光雷达的核心器件是LM-APDs焦平面阵列,由APD阵列和集成在上面的读出电路构成。APD阵列决定了系统的探测性能,读出电路决定了系统的信号处理能力。
2013年,George M. Williams团队对InGaAs LM-APD进行研究,其结构如图2所示。面积为30 um²的像素在273 K下,暗电流为0.2 nA,线性增益为20,量子效率为80%,电离系数比例k=0.2时的过量噪声因子F=5.56。当采用多层In-GaAs吸收层的结构,过剩噪声降低,工作增益能达到M=1000左右,但多层结构技术尚不成熟。
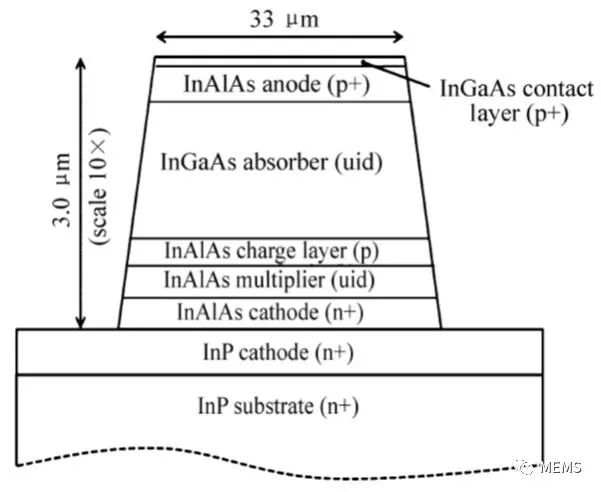
图2 InGaAs LM-APD结构图
目前技术较为成熟的是HgCdTe LMAPDs,其结构如图3所示。雷神公司于2011年研制出了256 x 256的HgCdTe LM-APDs阵列,1550 nm波长的响应度为15 A/W,在300 K工作温度下,增益可达到100以上,读出噪声较小,动态范围为12 bits,帧速能达到30 Hz,有效克服了探测器阵列光学串话问题,同时有效抑制了读出电路单元间的串扰。但实测增益与理论值相差较大,原因在于工作温度过高,导致器件性能降低。因此该器件面临的技术问题是需要实时采取制冷措施来保证高增益的性能。
2012年,法国CEA-LETI与以色列的Sofradir公司合作,基于HgCdTe的LMAPDs研制了一种像素规模为320 x 256的探测器,经过测试,在30 m距离处的测距精度优于11 cm。
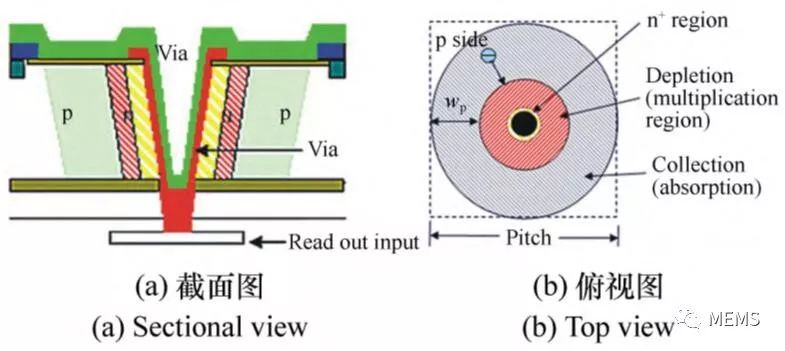
图3 美国DRS公司生产的HgCdTe LM-APDs截面图和俯视图
2016年,Ball Aerospace公司为了满足NASA提出的空间任务要求,采用了具有更高像素的256 x 256 CMOS InGaAs PIN作为探测器,系统的功耗降低了1/4,尺寸减小了29%,但缺点是PIN管的灵敏度不高,作用距离受到限制。
国内,2011年,东南大学设计了LM-APD主/被动红外成像读出电路,阵列的验证规模为64 x 64。2013年,重庆光电技术研究所设计并分析了64 x 64 AlGaN APD焦平面阵列的读出电路,利用等效电路模型推导得到积分电容为70 fF,放大增益可达到300。2014年,中国科学院上海技术物理研究所设计了一种用于门控激光成像雷达的制冷型数字化混成式HgCdTe LMAPD焦平面阵列的读出电路,其正常工作温度为77 K,阵列规模128 x 128。
2.2 光子计数激光三维成像雷达
2.2.1 工作原理
基于GM-APDs阵列的闪光激光雷达利用GM-APDs单光子计数的特性进行探测,因此又称为光子计数激光三维成像雷达,与基于LM-APDs阵列的区别在于是对脉冲飞行时间进行统计测量。其原理框图如图4所示。
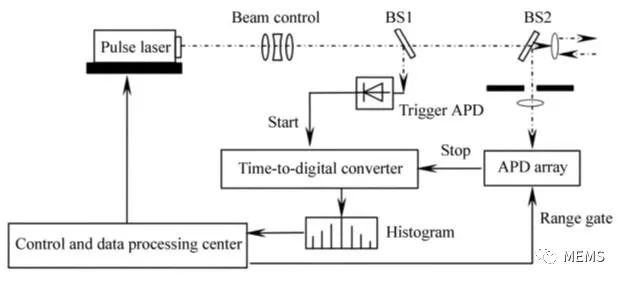
图4 光子计数三维成像激光雷达原理框图
利用质心算法可以得到目标距离的准确值:
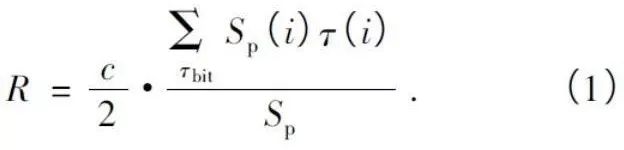
将脉宽τbin划分为i个很短的时间片,每段时间长为τ(i),Sp(i)为每个时间片内的回波光子数,Sp为目标反射回来的平均光子数,c为光速,R为目标距离。
2.2.2 国内外研究现状
2014年,美国Princeton Lightwave公司对规格为32 x 32和128 x 32的InGaAs GM-APD进行研究,其结构如图5所示。探测单元直径18 um,单光子响应率32.5%,使用更宽带隙的InGaAs作为吸收层后,暗电计数率在253 K温度下为5 kHz,时间抖动大约为500 ps,抖动误差主要来自于读出集成电路。2012年,美国雷神(Raytheon)公司研制了基于HgCdTe GM-APDs探测器的成像激光雷达,目前可做到256 x 256规格的阵列,主要应用于航天器导航和登月飞行器自主着陆。
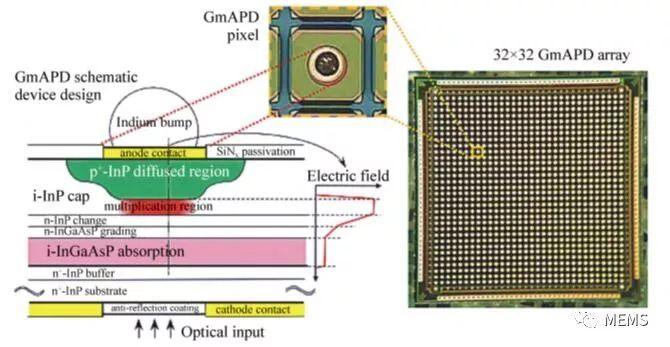
图5 32 x 32 InGaAs GM-APD结构图
国内基于GM-APDs探测器的光子计数激光雷达研究起步较晚,探测器的发展水平较低。目前中国电子科技集团公司第四十四研究所研制出了规格为32 x 32的InGaAs GM-APD探测器阵列,哈尔滨工业大学利用该器件搭建了激光成像系统并对720 m和1.1 km处的建筑进行成像,获得了目标表面结构的距离像,但并未给出测距精度,成像效果并不理想。
2.3 增益调制型成像激光雷达
2.3.1 工作原理
增益调制测距原理是通过测量脉冲的飞行时间和调制增益的函数关系计算出待测目标的距离值。该体制需要结合未经调制和调制后的图像信息来得到目标的三维图像。目前有两种实现方法:一是采用单个ICCD进行两次探测,两次探测之间存在时间差,严重影响成像速度;二是采用双通道ICCD进行一次探测,分别对两个ICCD进行不同增益调制,系统结构框图如图6所示。增益调制函数已知,通过测得双通道接收的光功率,可解算出脉冲飞行时间,从而可以获得目标的距离信息。
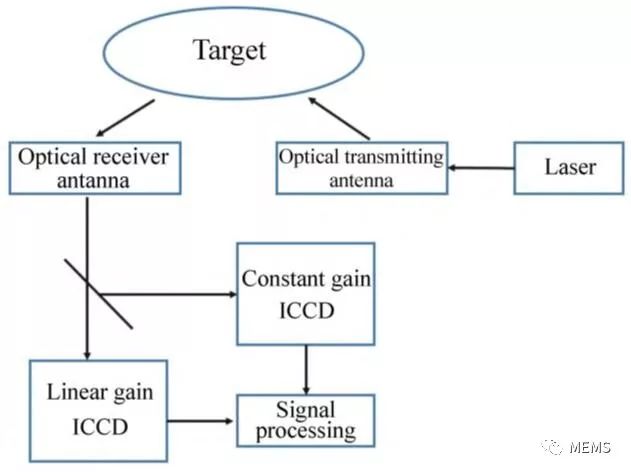
图6 双通道单增-恒定增益调制成像激光雷达工作原理图
2.3.2 国内外研究现状
2004年,日本NHK工程服务部的Masahiro Kawakita等人提出了一种基于增益调制实时测距方法,用增益调制技术代替了光源强度调制,采用单增-单减的增益模式,在1 m距离上成像精度达到毫米量级。
国内对增益调制型激光雷达研究较多。2009年,哈尔滨工业大学靳辰飞团队提出了通过高压调制ICCD增益进行测距的方法。研究发现,指数函数调制下,测距精度不受相对距离影响,测距精度在0.17~1.19 m范围内波动。随后该团队采用双通道ICCD进行接收,获得较好的测距精度和成像效果。2016年,屠志鹏等人采用更接近实际的非线性增益进行调制,分析了成像准确度,对距离60 m处的目标进行成像,如图7所示,获得了距离图像,距离准确度为分米量级。
图7 实验场景图和目标距离图像
2008年,浙江大学严慧民团队提出了基于线性-恒定增益调制模式的成像激光雷达。2013年,该团队分析了复合目标对测距影响,并采用单通道线性-恒定增益模式对学校图书馆进行探测,成像效果如图8所示,在380 m处的测距精度为0.4 m,同时指出了采用指数增益调制方式存在一定测距限制。
图8 浙大图书馆的距离灰度图
2.4 调频连续波三维成像激光雷达
2.4.1 工作原理
调频连续波(Frequency Modulated Continue Wave,FMCW)测距原理是将时间的测量转换为与其对应成比例的差频频率的测量。其中采用线性调制、非相干探测的方式利于无扫描三维成像应用。这里以锯齿波为例进行介绍。
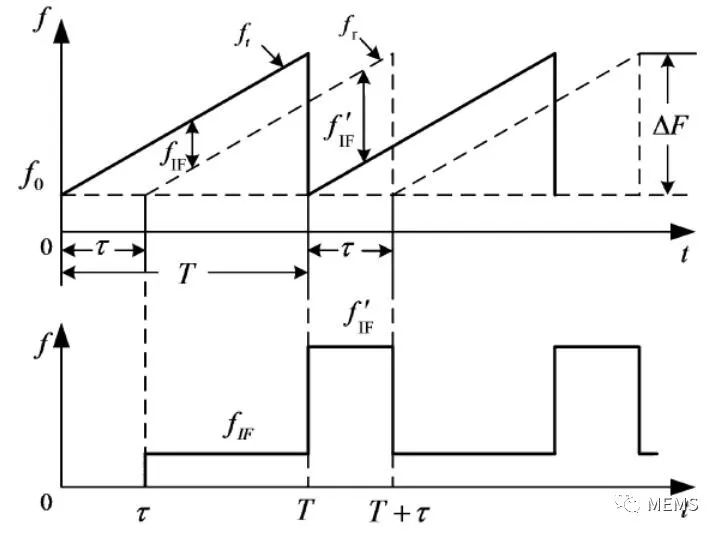
图9 锯齿波调制测距原理图
已知锯齿波调制函数,本振信号与回波信号混频后,滤去高次谐波分量得到中频信号,则目标距离的表达式为:

式中,ΔF为调制带宽,T为调制周期,fIF为中频频率。
FMCW三维成像激光雷达由发射子系统、接收子系统和信号处理子系统构成,其系统框图如图10所示。
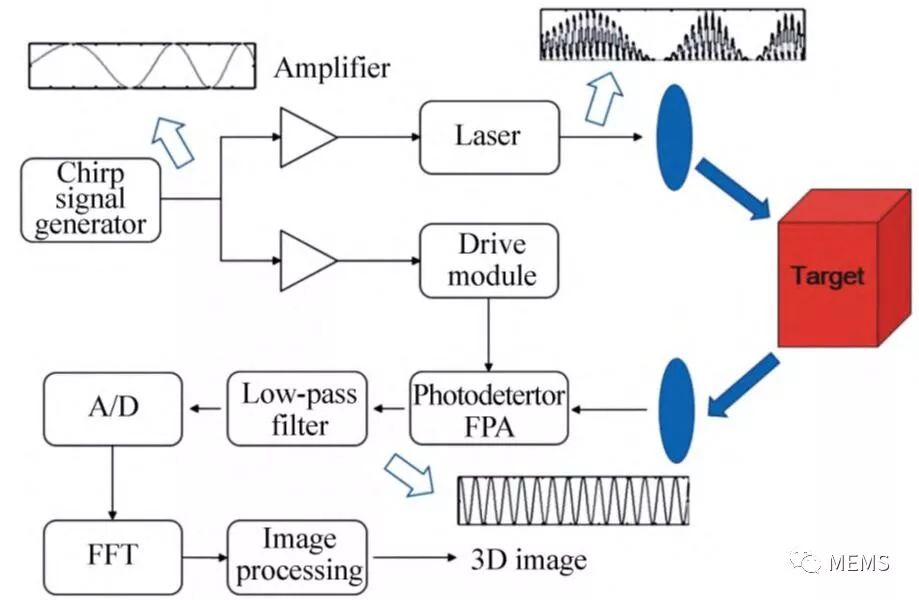
图10 FMCW三维成像激光雷达系统原理框图
2.4.2 国内外研究现状
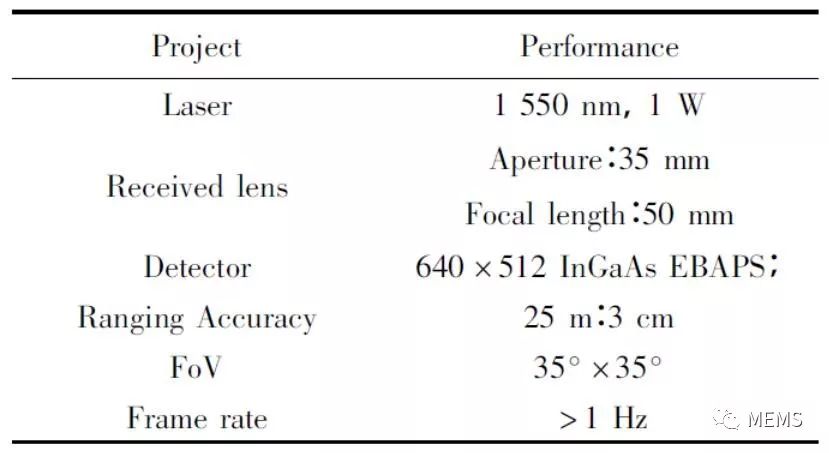
1996年,美国陆军实验室(Army Research Laboratory,ARL)提出“FMCW三维成像激光雷达”,单点测距在10 m处精度能达到0.25 mm。2007年,该机构研制出了FOPEN三维成像激光雷达样机,其主要性能参数如表1所示。
表1 FOPEN三维成像激光雷达性能参数
2000年,ARL对对ICCD、量子阱电光调制器(Quantum-Well Electro-Optics,QWEO)、电压调制光电器件(Voltage-Modulated Optical Detector,VMOD)、金属半导体金属探测器(Metal-Semiconductor-Metal,MSM)和电子轰击有源像素传感器(Electron Bombarded Active Pixel Sensor,EBAPS)光电混频接收性能进行研究。2006年,ARL利用美国Intevac公司生产的EBAPS搭建实验系统,采用像素捆绑技术,降低分辨率来提高成像帧速,对距离为35 m处的悍马军车进行成像,空间分辨率为128 x 128,成像帧速能达到37 fps。同年,ARL根据光子计数测距原理提出了基于GM-APDs完成测距的方案,设计了基于电混频和光电混频两种解调模式的系统,并进行了仿真分析。图11表示光电混频的测距系统框图。由于当时GM-APD处于研发阶段,因此ARL并未开展成像实验。国内对该体制的研究工作主要集中在信号处理和算法方面。2011年,哈尔滨工业大学张子静等人沿着ARL思路,以GM-APD为接收端探测器进行了理论研究和仿真分析,采用不同的算法提取遮蔽目标信息,2013年,又基于GM-APD探测器提出了一种预混频的方法,提高了系统的信号带宽,并且消除了探测器死区时间的影响。2014年,航天工程大学杜小平团队针对相对运动和信息延迟造成的偏差提出了基于偏差抵消原理的距离和速度信息提取方法。
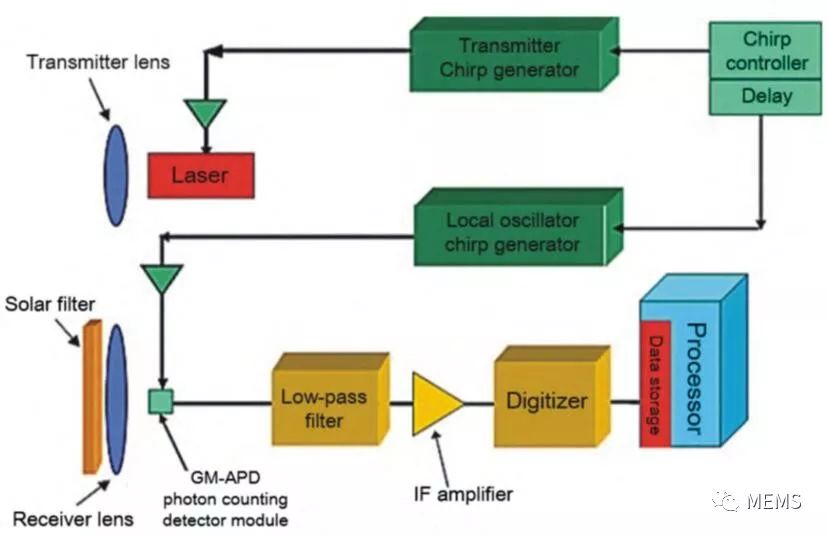
图11 基于GM-APD的FMCW激光雷达测距系统原理框图
我国微光技术起步较晚,像增强器主要通过引进仿制,价格昂贵。国外已经研制出高性能四代像增强管,我国已经研制出了第三代IIT的样品,其光电阴极灵敏度基本达到国外水准,技术瓶颈在于中继元件耦合问题,器件的稳定性和可靠性方面不足。QWEO的量子阱结构生长较为复杂,技术难度高,目前国际上只有西方少数国家能够实现大面阵器件。
2011年,西安光机所根据ARL提出的理论研制出了响应度较高的32 x 32 GaAs MSM阵列芯片,但暗电流更大,稳定性差,有待进一步优化。国内宋德博士等人正在开展对P型基底均匀掺杂条件下EBAPS电荷收集效率的模拟研究,处于理论研究和模拟仿真阶段,未见其产品的相关报道。对于GM-APDs阵列,国内资料显示目前中国电子科技集团公司第四十四研究所研制出了32 x 32的InGaAs GM-APD探测器阵列,其性能与国外差距较大。其他研究团队目前开展理论研究和仿真分析,还未研制出相关样品。
2.5 鉴相式三维成像激光雷达
2.5.1 工作原理
该体制测距原理与FMCW相似,区别在于将差频频率的测量转变为相位差的测量。其原理框图如图12所示。
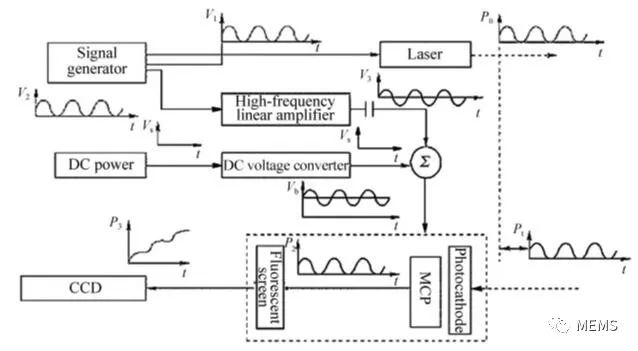
图12 基于ICCD的鉴相式激光测距原理框图
调制信号对激光功率和微通道板同时调制,CCD的积分时间为信号周期的整数倍并得到一个测量值。微通道板未经调制下,CCD在同样条件下积分得到另一测量值,两者的比值为Cp:

式中,m0为激光功率调制系数,m为微通道板增益调制度,可解算出相差φ。再根据相位差与距离的关系式可解算出目标距离。
2.5.2 国内外研究现状
1993年,美国桑迪亚国家实验室(Sandia National Laboratories,SNL)提出了“鉴相式三维成像激光雷达”。2003年,SNL提出了“分光器+光纤耦合”技术来解决运动目标成像失真的问题,但以牺牲测距精度为代价。
2005年,SNL研制出了“激光动态距离成像仪”(Laser Dynamic Range Imager,LDRI),距离在1.5~3.0 m时测距精度为6.4 mm,视场角18°x 13°,帧速为30 Hz,平均功耗为17 W。图13是利用LDRI激光雷达对空间站表面填充材料成的三维图像。
图13 LDRI对空间站表面成的3D图像
国内,2007年,浙江大学对鉴相式三维成像激光雷达进行研究,对四次成像法进行了理论推导和仿真分析,并开展了近距离成像实验,基本能区分物体的相对位置关系。2011年,电子科技大学介绍了基于方波与方波相关法的测距方法,对测距原理进行仿真,对测距精度进行分析。由于鉴相式测距方法自身存在诸多技术短板,国内对该体制并未展开进一步研究。
2.6 基于偏振调制的三维成像激光雷达
2.6.1 工作原理
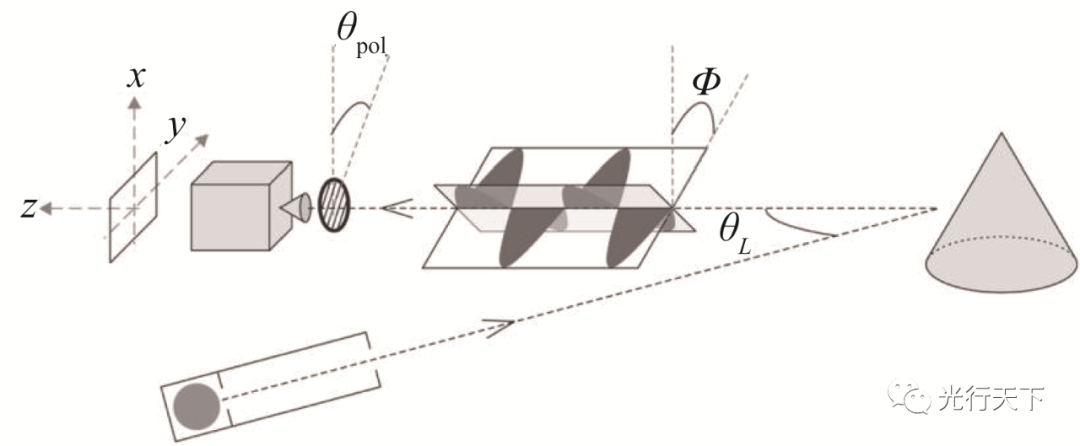
基于偏振调制的三维成像激光雷达利用晶体的电光效应,改变反射光波的偏振态,通过比较反射回波在两个相互垂直的偏振方向上信号的差异来获得时间信息,从而获取目标的距离值。其测距原理如图14所示。根据两个相机接收到的光学参量结合调制函数的表达式可以解算出时间信息,进而获得目标的距离信息。
图14 偏振调制激光测距原理框图
2.6.2 国内外研究现状
美国空军成立的LIMARS项目提出一种基于偏振调制的三维成像激光雷达,该系统是采用两个相机进行接收。美国国防部高级研究计划局(Defense Advanced Research Projects Agency,DARPA)和美国TETRAVUE公司将该技术成功实现,DARPA分别对卡车和坦克进行三维成像,如图15所示。
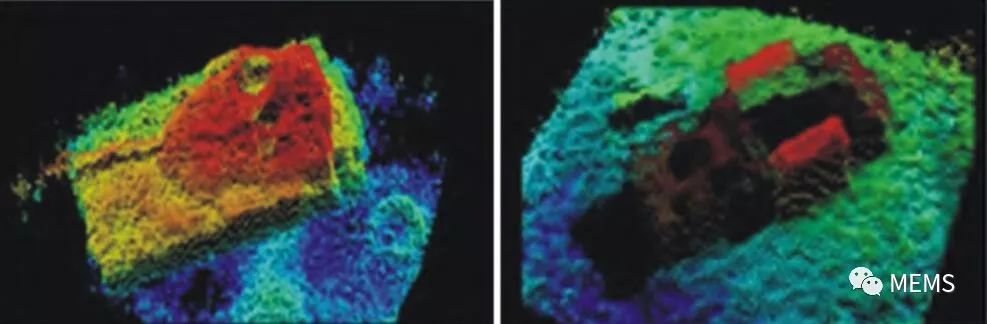
图15 偏振激光三维成像图
国内,2014年,航天工程大学开始对该体制相关理论进行深入研究,分析了两种基于偏振调制的高分辨激光雷达系统,经过仿真分析,两个系统具有相同的测距精度,能达毫米量级,其成像效果如图16所示,使用偏振分光棱镜和两个CCD的系统具有更高图像分辨率的优势。随后,该团队进一步研究了发射信号形态对测距精度的影响,对提高偏振调制激光三维成像雷达的测距精度有重要意义。
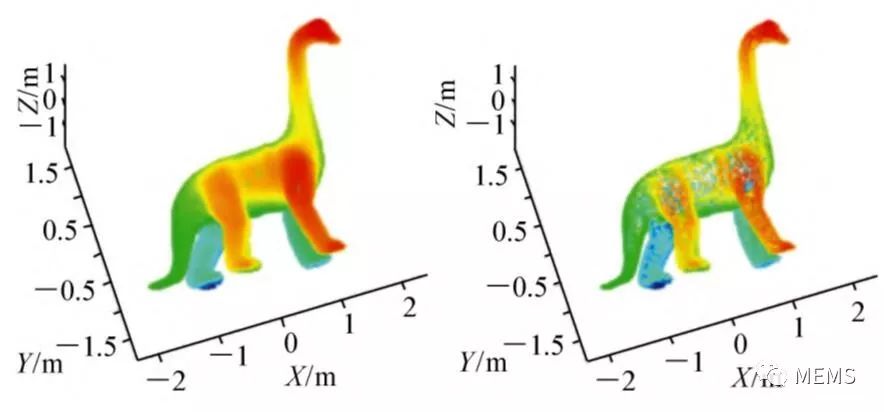
图16 两种偏振调制体制的成像效果对比图
中国科学院光电技术研究所采用锯齿波调制函数对1 km远的建筑进行成像实验,提出了适合于该体制的自适应距离选通测距方法,并在后期的图像配准算法上做出了改进,实验结果如图17所示。
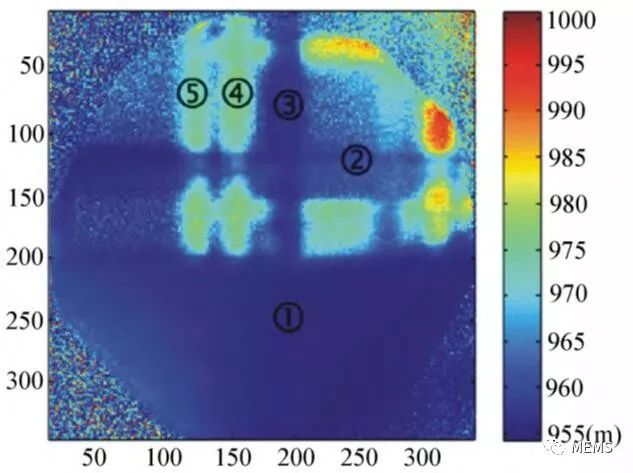
图17 1 km处的建筑物距离图
2.7 条纹管激光成像雷达
2.7.1 工作原理
条纹管激光成像雷达系统(Streak Tube Imaging Lidar,STIL)是将脉冲飞行时间转换为荧光屏上条纹的相对距离。采用脉冲激光器,回光经过光学天线聚焦到条纹管上,光电子在荧光屏上形成条纹像,由CCD采集。其成像原理如图18所示,测距精度能达厘米量级。条纹管又可分为单缝和多缝。单缝是线性阵列探测器,需要一维扫描整个场景,多用于机载系统;多缝更有利于无扫描三维成像,但缺点是成像面积少,精度较低。
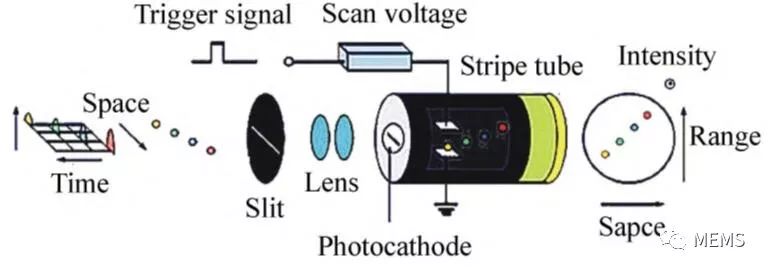
图18 条纹管成像原理框图
2.7.2 国内外研究现状
1989年,美国F. K. Knight提出了“条纹管探测器的闪光式激光雷达”的概念。随后Arete Associates公司研发了64 x 64的多缝条纹激光三维成像雷达,图19为其原理示意图。
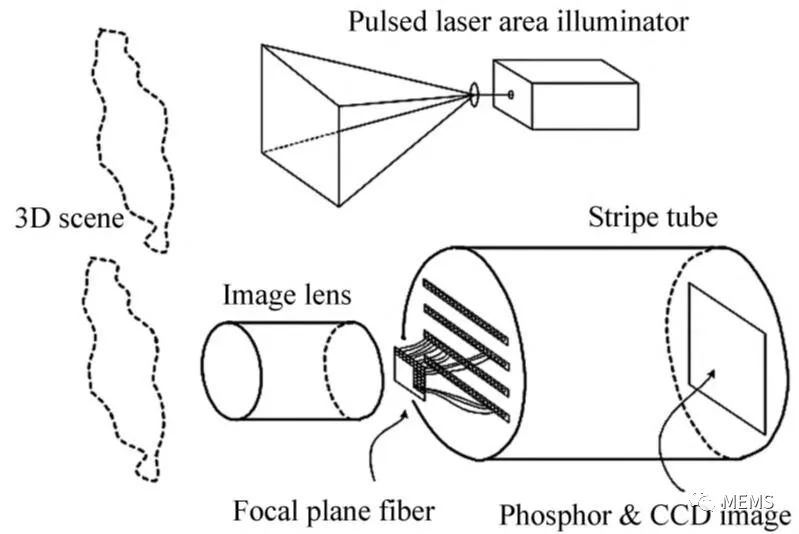
图19 多缝条纹管激光雷达原理图
随后对地面建筑场景的进行三维成像,如图20所示。该公司主要针对海面波和海上目标探测开展相关研究。
图20 条纹管激光雷达对地面场景三维成像图
国内,2010年,哈尔滨工业大学将单缝STIL与偏振成像技术相结合,利用目标不同的偏振特性,成功在杂乱的背景下识别目标,实验结果如图21所示。
2014年,哈尔滨工业大学搭建了单缝条纹管激光成像雷达系统,分别在实验条件(近距离不考虑信噪比条件下)、远距离条件(4 km目标成像)以及水下条件进行了系统分辨率测试,最近3 m处为0.02 m,最远6 km处为1 m。
2016年,北京理工大学夏文泽博士等人提出了条纹管激光雷达的仿真模型,从测距方程、脉冲模型、系统噪声等角度进行分析,为条纹管激光雷达的设计提供了更为系统的理论指导。
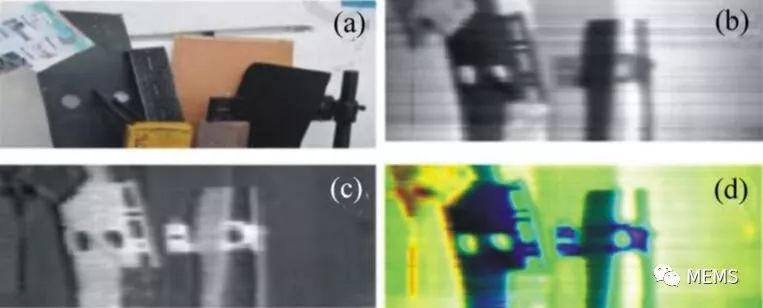
图21 待测目标的(a)实物图、(b)强度像、(c)偏振像、(d)融合图像
2.8 距离选通三维成像技术
2.8.1 技术原理
距离选通成像技术也叫时间门选通成像技术,可以有效降低目标后向散射,从而提高成像质量,技术原理如图22所示。选通门开启时间决定成像距离,波门宽度决定成像的景深范围。开启时间越精确,测距精度就越高,波门宽度越窄,图像效果就越好。一次选通成像获得一幅二维图像,调整选通门距离获得多幅图像,实现对目标切片成像,最后通过图像融合得到目标三维图像。选通成像技术是一种对特定距离目标实现三维图像还原重构的成像手段,在不同体制的成像激光雷达中,探测器选通门的控制方式各不相同,但核心思想都是只对包含目标距离范围内的回波信号进行接收。
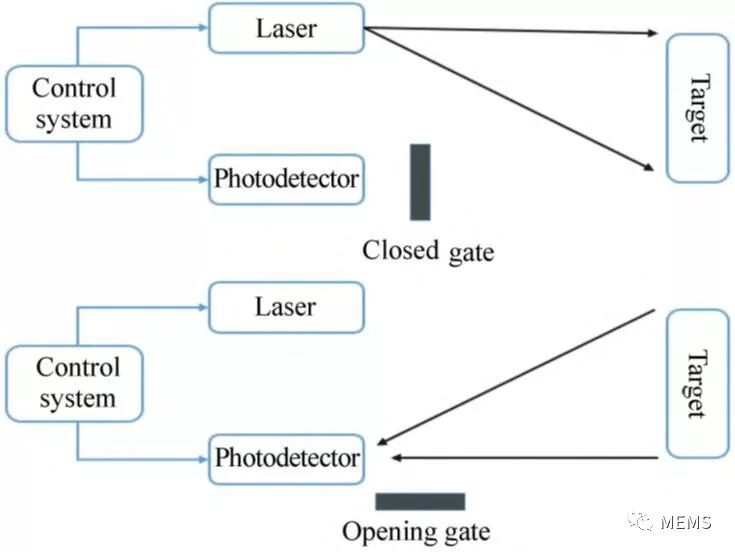
图22 距离选通成像的原理图
2.8.2 国内外研究现状
国外许多国家在该技术研究上取得显著成就,例如美国、俄罗斯、法国、已经研制出相关设备并投入实际应用。目前国内如航天工程大学、中国科学院半导体所等多家单位正在开展相关研究,取得了一定研究成果。
2016年,航天工程大学搭建了基于ICCD的距离选通实验系统,提出了一种基于像质评价的互信息配准算法来匹配激光图像目标的空间位置,系统如图23所示,实验结果表明该方法有效配准激光图像,大大降低了对运动目标三维成像的难度。
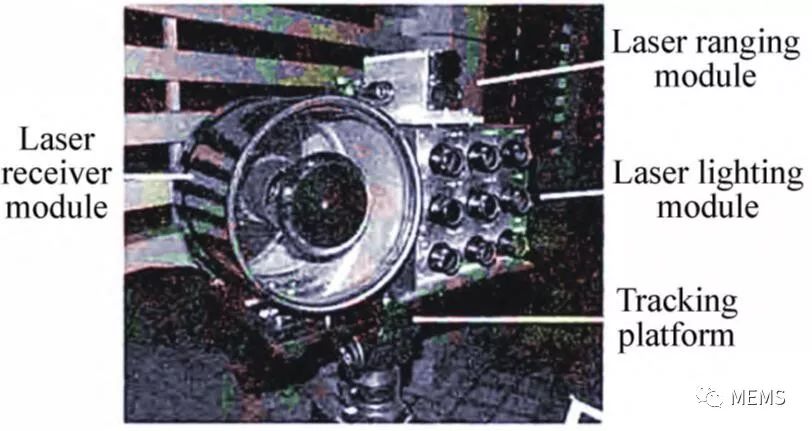
图23 系统实物图
2017年,华中科技大学提出了一种用于长距离水下线状目标检测算法,通过对比度拉升、中值滤波、小波变换、Canny边缘检测算子、参数估计等处理,计算目标位置信息,实验结果表明,利用该算法检测率可达93%,有效检测距离增大。
3 技术优劣对比和未来发展趋势分析
3.1 不同体制成像激光雷达性能的比较
基于LM-APDs阵列的闪光激光雷达具有测距精度高、成像速度快、能对运动目标无失真成像、抗环境干扰能力强等优点。但也存在以下几个问题:脉冲激光的峰值功率较高,在近距离探测时容易造成LM-APD探测单元饱和甚至损坏;高精度的时间测量对信号的采样、信号传输和处理带宽要求较高;目前LM-APDs阵列规格较小,限制了三维图像的分辨率;探测器阵列集成度要求高、制作工艺复杂,器件成本高。
光子计数三维成像激光雷达具有单光子探测的特点,灵敏度极高,使用小功率激光器就能实现超远距离成像,降低了对激光器功率和探测器口径的要求,适合于对器件体积有较大限制的实际应用;其输出的是数字电平信号,不需要宽带模拟处理电路;基于统计特性的图像处理方法有效克服了环境等噪声干扰,提高了信噪比。该成像体制同时存在以下问题:需要多次累计探测,增大了数据处理量,严重影响成像速度,对运动目标成像存在失真问题;探测器灵敏度极高,使探测器容易饱和甚至损坏,大动态范围成像效果较差;目前GM-APDs焦平面阵列与LM-APDs阵列存在同样的问题,并且该器件抗人为干扰的能力较弱。
增益调制型成像激光雷达具有测距精度高,数据处理量小,距离解算方法简单等优点。目前该系统普遍采用ICCD接收,存在的问题是ICCD的驱动电压近千伏,功耗大,中继元件或光纤耦合降低了能量利用率和横向分辨率。单通道和双通道接收各有利弊,根据任务需求选择不同模式,基于双通道型只需一次探测,成像速度快,能对运动目标无失真成像,但双通道使用两个相机,增加了系统体积和成本,不同相机由于灵敏度、噪声特性等存在差异将影响测距精度等指标,需要进行像素配准处理,因此增加了数据处理量和系统的复杂性。单通道型不存在相机差异问题,但必须通过多次探测才能获得图像,成像实时性较差,只适用于静止目标的探测,限制其应用范围。
FMCW三维成像激光雷达将时间信息加载到频率上,抗干扰能力强;中频信号经带宽压缩后仅为千赫兹,减轻了信号处理负担;理论上不存在测距盲区和距离模糊问题;连续波激光功率小,回波不易使探测器饱和;测距精度高,近距离时能到达毫米量级。该体制存在以下问题:需要对激光器进行超宽带信号调制;光电混频探测器目前处于技术瓶颈期,已有的器件成本较高,且存在技术短板;解算距离需要进行FFT运算,影响成像实时性。
鉴相式成像激光雷达测距精度高,信号处理简单。采用连续波激光工作,不易造成探测器饱和或损坏,适用于近距离、高精度三维成像。该体制存在严重的距离模糊问题,需要通过不同调制频率消除,增加了数据处理量,降低了成像速度,无法用于运动目标的探测;同时系统的抗干扰能力较弱。
基于偏振调制的成像激光雷达对运动目标探测无失真;两个偏振方向的强度比值消除了目标折射率对测距精度的影响;在对反射回波信号的处理中,只有一次“光-电”转换,减小了信号衰减,提高了回波能量利用率。该系统存在以下问题:对于成像体制而言,必须通过两幅图像来消除目标反射率的影响。对于中国科学院提出的方案而言,EMCCD自身在强背景光条件下所成的图像存在拖尾效应;该体制也存在双相机问题;KDP晶体的调制电压近千伏,功耗较大,同时晶体视场角较小,成像效果易受入射光角度、工作温度等影响。
条纹管激光成像雷达具有探测距离远、距离分辨率高、大视场、成像速度快、抗干扰能力强的特点,并且条纹管技术比较成熟。该体制存在的问题是:整个系统存在多次光电转换过程,能量损耗大,利用率低;条纹管体积较大,结构复杂,驱动电压近千伏,增加了系统功耗,内部噪声大,严重影响成像质量;荧光屏上的条纹光强普遍较弱,同时存在中间强、边缘暗的现象,易造成测距误差。
距离选通激光三维成像技术的显著优点是有效克服大气后向散射和背景干扰,增强系统环境适应能力。该技术也存在短板:实际应用中必须借助其他方式获得先验知识,才能进行选通成像;测量精度与时间切片的数量成正比,精度越高,切片数量越多,成像速度就越慢,不适合实时性较高的应用场合。
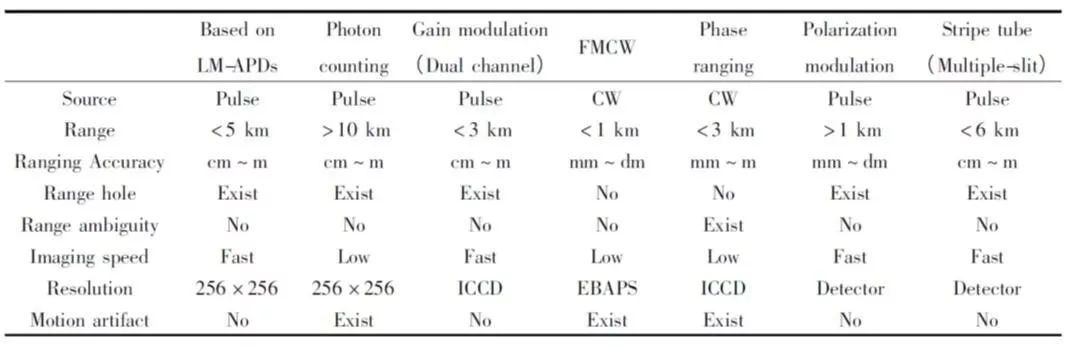
至此,本文已经详细介绍了不同体制无扫描激光三维成像雷达系统的工作原理、国内外研究现状、系统优缺点。为了更加直观地体现出不同系统的技术特点,表2对7种无扫描激光成像雷达系统部分特性进行归纳总结。
表2 7种无扫描激光成像雷达系统部分性能比较
3.2 发展趋势分析
基于LM-APDs阵列闪光激光雷达的核心器件是LM-APDs焦平面阵列,高灵敏度、高增益、大规模、高精度、低噪声、快速读出、工作温度限制较小等是该器件的发展趋势。
光子计数激光雷达的核心器件是GM-APDs焦平面阵列。为了提高图像分辨率,需要扩大其阵列规模;为了进一步提高系统探测距离,需要将微透镜阵列与APD阵列集成整合,充分利用反射回光的能量;为使探测器获得高增益,其制冷问题有待进一步解决;需要进一步降低暗计数,解决像素串扰的问题;需要改善统计算法,来提高成像速度。近年来一些国家已经研制出多工作模式的APD焦平面阵列,响应波长范围从可见光到中波红外,阵列规模有望突破512 x 512,应用范围也将不断拓宽。
增益调制型激光成像雷达的核心器件是ICCD,需要进一步降低器件的驱动电压和功耗,减小IIT与CCD耦合损耗。不同的增益调制模式影响测距精度,需要找出最佳的调制方式。对于单通道,快速实现三维图像重建是其关键。对于双通接收,消除双相机自身误差是关键。
FMCW激光三维成像雷达的核心器件是光电混频探测器阵列,现有的EBAPS成像帧速与图像分辨率无法做到兼容,制约了该体制激光成像雷达的成像效果。国际上正在进行技术攻关,实现易于调制、大面阵、低功耗的光电混频探测器阵列。
鉴相式三维成像激光雷达,同样采用ICCD作为接收端,需要不断提高ICCD性能。研制发射功率更加稳定的激光光源、寻找解决运动目标失真问题新方案是鉴相式三维成像激光雷达的发展趋势。
基于偏振调制三维成像激光雷达的核心器件是电光调制器,其发展趋势是实现低调制电压、低功耗、大视场角、入射光角度和工作温度影响较小。该体制同样采用双相机接收,消除双相机问题是关键。
条纹管激光成像雷达的核心器件是条纹管。发展趋势是降低器件的工作电压,减小内部噪声,消除荧光屏上中间与边缘的差异现象。对于多缝结构而言,增加成像面积是关键。综合不同核心器件来看,目前实现无扫描激光三维成像有两个发展方向:一是通过采用3D传感器实现成像;二是采用基于2D传感器来实现成像,如图24所示。
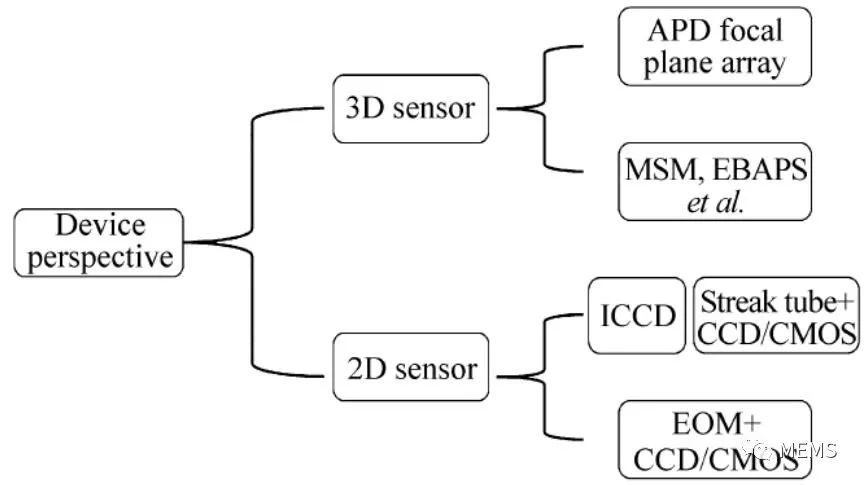
图24 三维成像激光雷达的传感器分类
APD焦平面阵列是3D传感器的典型代表,包括线LM-APDs、GM-APDs,由APD阵列、微透镜阵列(Micro Lens Array,MLA)和读出电路(Read out integrated circuit,ROIC)组成。目前闪光激光雷达技术在国外相关领域处于领先地位,已出色的完成了许多空间任务,同时在无人驾驶、无人机等领域也得到广泛应用。
国外APD阵列制作成本高,据资料显示美国雷神公司研制的基于HgCdTe LM-APDs的相机价格不低于50万美元,且阵列规模目前最高只有256 x 256,而CCD相机最大能到4096 x 4096,相比之下差距明显。由于国外对我国大面阵探测器实施技术封锁和严格禁运,目前能买到的面阵最大规格为8 x 8,线阵为1 x 16。
国内报道的APD焦平面阵列规模较小,读出电路复杂、集成度不高,未达到三维成像应用标准,大部分还处于理论分析和实验测试阶段。其他例如MSM、EBAPS等3D传感器也存在相似的问题,这里不再赘述。
传统的2D传感器有CCD和CMOS,目前技术较为成熟,具有大规模、高帧速、宽范围的优势。采用2D传感器实现三维成像,解除了3D传感器对三维成像激光雷达图像分辨率的限制,但需要通过其他方法获取时间信息,其核心思想是将时间信息转换为2D传感器可探测的物理信息。通过前面的介绍,利用2D传感器实现三维成像的方案较多,包括增益调制型、FMCW、鉴相式、基于偏振调制和条纹管激光雷达,归纳起来可以分为三类:利用ICCD的单/双通道接收、利用条纹管的单通道接收、利用电光调制器的双通道接收。
其中ICCD和条纹管原理相似,目标反射回光先通过光电阴极产生光电子,接着在电学层面进行时间信息转换,然后轰击荧光屏转换为光信号,最后通过后端的2D传感器进行接收。回波信号变化过程为“光-电-光-电”共有3次光电转换。电光调制器则是将时间信息转换过程在光学层面进行,回波信号变化仅有1次“光-电”转换,省去了多重转换过程,减小能量损失、提高了利用率,减小电学噪声、提高了信噪比。
这种在光学层面进行时间信息转换后获取的飞行时间也称为光学飞行时间(Optical Time-of-Flight,OToF)。国外资料显示,许多研究机构正在开展光学飞行时间激光雷达系统的研究,在APD焦平面阵列发展的瓶颈时期,极有可能成为其绝佳的替代品。
4 结束语
本文对闪光式、光子计数、增益调制型等7种无扫描激光三维成像雷达进行了综述,阐述了不同体制的工作原理、国内外发展现状,比较分析了不同成像激光雷达的体制优势和技术短板,结论如下:在远距离成像应用中,闪光式、光子计数激光成像雷达探测距离远,同时能够保证高测距精度;在近距离成像应用中,调频连续波和鉴相式激光成像雷达测距精度更高,不易使探测器发生饱和、损坏现象;在对动态目标成像应用中,采用累积探测方式的光子计数和鉴相式成像激光雷成像速度较慢,无法满足任务需求。从对核心器件的发展现状分析,得出如下结论:为了获得高分辨率图像,采用像素规模大、成本相对较低、技术成熟的2D传感器来实现激光三维成像具有显著优势;为了得到高质量的成像效果,选择在光学层面进行时间信息转换的方法,具有高能量利用率、高信噪比的优势。
结合我国无扫描激光雷达领域发展情况,一方面提高国内半导体产业技术水平,积极开展APD焦平面阵列等先进3D传感器的研制工作,缩小与国外的差距;另一方面是根据不同体制的特点,结合我国技术优势,运用创新思维积极寻找3D传感器的替代品,来达到国外激光三维成像先进水平。
-
传感器
+关注
关注
2525文章
48069浏览量
739999 -
激光雷达
+关注
关注
961文章
3647浏览量
186665
原文标题:无扫描激光三维成像雷达研究进展及趋势分析
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

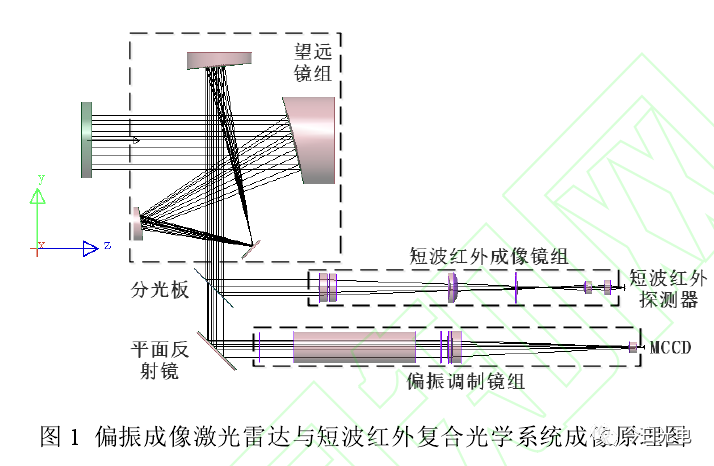
偏振成像激光雷达与短波红外复合光学接收系统设计与分析介绍
LabVIEW开发二维激光振镜扫描控制系统


偏振三维成像技术的原理和研究进展


为什么激光共聚焦显微镜成像质量更好?

基于深度学习的散射成像研究进展






 工商网监
工商网监
评论