 飞马无人机在1:2000地形图快速成图中的应用
飞马无人机在1:2000地形图快速成图中的应用
一、项目背景
1.1项目介绍
我国内蒙古自治区风能资源丰富,其作为邻近华北、东北和西北电网的负荷中心,是国家落实可再生能源发展规划的目标地区、是开发建设百万及千万千瓦级风电基地的重要地区,被国家确定为“风电三峡”基地。
为了保障风电建设项目的顺利实施,我司受甲方委托,协助甲方在20天内完成了内蒙古自治区某地1619平方公里的1:1000数字正射影像、1:1000数字高程模型、1:2000数字线划图的制作任务。该项目要求时效性强,因此所有成果为全新数据采集,非修补测。
图1.1 1测区范围
图1.2 2测区范围
1.2项目特点
(1)有人机因航高问题短时间内无法审批,因此无法采用有人机作业。
(2)该地区常年风力较大,且项目实施月份大风、降雨等恶劣天气较多,因此需要选择抗风性能好、效率高的无人机进行作业。
(3)该测区以草原地貌为主,无法选到适合的事后像控点位,而且牧民对草场非常重视,如果给草场带来损害会造成不良影响,因此布设事前像控也较困难。
(4)在空三过程中,如果通过传统刺像控点的方式进行空三处理,需要耗费大量的选片刺点时间,增加了空三作业时间。
(5)该项目要求总工期为20天,包含前期的控制作业,且最终成果几乎涵盖了全部的4D产品,并要求统一提交。若采用传统手段,仅完成DLG线划图一项就需要组织不少于80~100人的专业测图队伍,但实际投入人员仅有25人。
二、技术路线
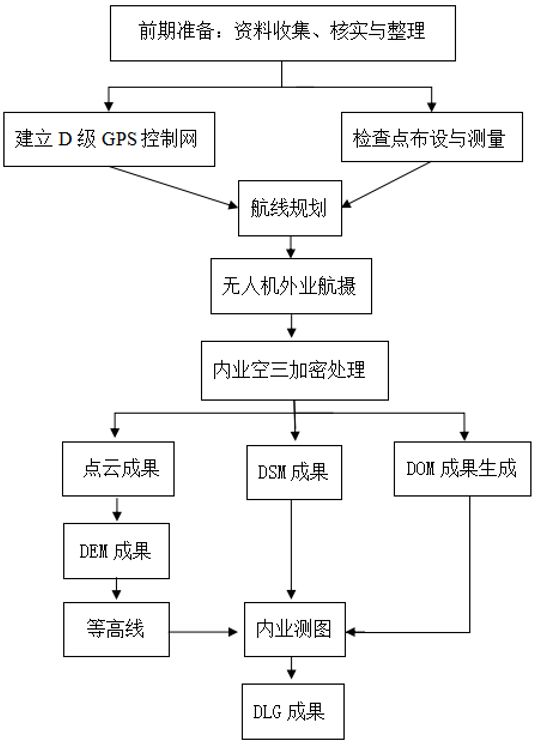
图2.1 技术路线流程图
三、作业流程
3.1 控制测量
根据甲方需求,在测区范围内建立了一套D级GPS平面控制网,并提供国家西安80和国家CGCS2000两套坐标系统的控制成果。
3.1.1 控制点埋石
埋石按照技术要求规格制作,预制桩中心埋设7cm带测量标志的不锈钢构件。
图3.1 控制点埋石
3.1.2 静态观测及处理
在静态控制施测前,根据静态控制网的布设方案、规模的大小、精度要求、卫星星座的选择、参与作业的GPS接收机数量以及后勤保障条件(交通、通信)等,制定了详细的观测计划。
该项目外业静态数据观测共投入作业人员十二人,GPS接收机十二台,共观测了四十二个GPS点位,每天观测三个时段,历时三天完成了整个区域的静态数据观测和解算。
3.2 无人机外业采集
3.2.1 无人机选型
根据测区的实际情况,该项目最终选用了飞马F300电动无人机作为飞行平台。首先,该款无人机最大起飞重量小于7公斤,属于轻型无人机,且具备第三方责任险,符合国家相关规定。其次,该款无人机支持RTKPPK融合技术,可以实现免像控作业,从而解决了内蒙地区难以布设像控的困难。同时,该无人机在5级风力情况下可以安全稳定的飞行,适宜在该测区应用。飞马F300电动无人机搭载了SONY黑卡相机,该相机具备4200万像素,可以满足传统立体测图的需要。
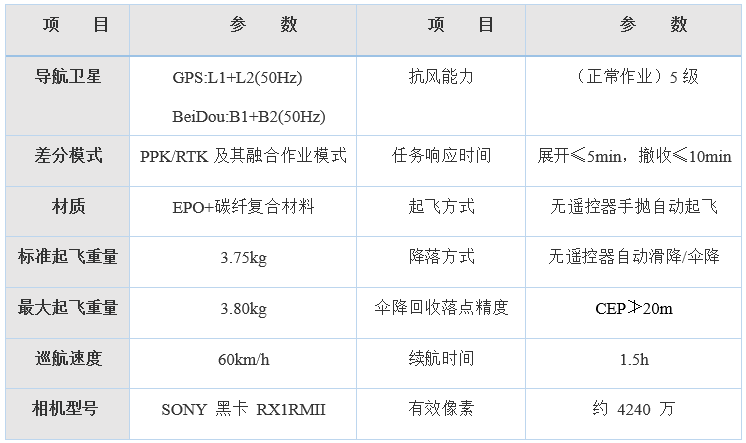
表3.1 飞马无人机技术参数表
3.2.2外业检查点布设及采集
该项目选用的无人机机型,支持免像控功能,原则上不需要布设像控点。但是为了后期检查成果精度的需要,在测区范围内,布设适当的检查点。为了提高作业效率,检查点的布设与区域控制点的布设重叠,在控制测量观测的同时,采集外业检查点成果。
图3.4 控制点和航测检查点重叠观测
3.2.3 影像数据采集
(1)地面布设相片精度检查点
图3.5 检查点布设
(2)飞控软件(地面站)设置
①飞行各项参数设置
图3.6 飞行参数设置
②航线设置
图3.7 航线规划设置
(3)架次划分
1测区F300无人机共计飞行45架次,合计飞行401平方公里。
2测区F300无人机共计飞行132架次,合计飞行约1225平方公里。
图3.8 1测区各架次分布状况
图3.9 2测区各架次分布状况
(4)无人机手抛起飞
图3.10 无人机手抛起飞
(5)飞行质量检查
本项目飞行质量较好,航线弯曲度较小,飞行时间都选在阳光充足、风向稳定的时段。
像片有效范围覆盖了技术设计要求的全部摄区。在航向上超出成图范围的基线均在一条以上,旁向上超出成图范围均为像幅的30%以上,全区无摄影绝对漏洞。航向重叠:一般在 75%左右,最小为 70%,最大达 80%,满足成图要求。旁向重叠:一般在 60%左右,最小为 55%,最大达 65%,满足成图要求。像对中像片旋偏角:一般小于 4°,有少数像对在 5°~7°之间。航线弯曲度:所有的弯曲度均小于 2%,符合设计要求。
3.3内业数据处理
3.3.1 内业处理流程
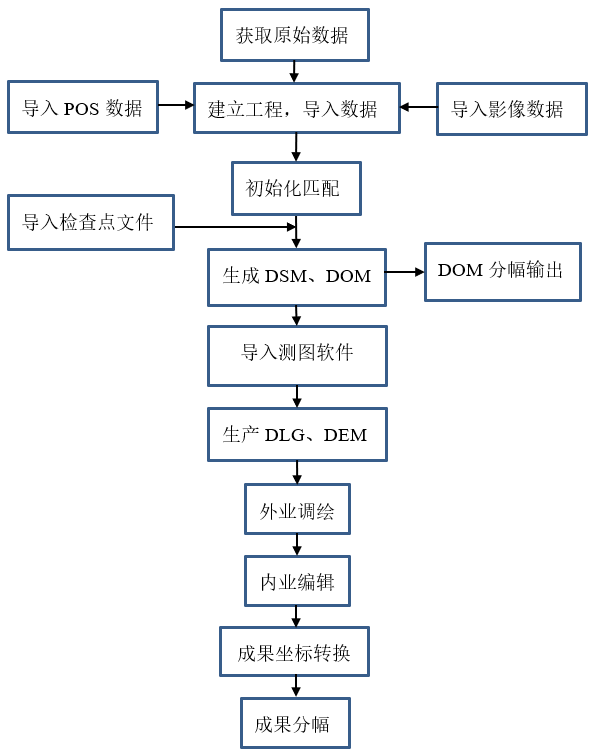
图3.11 内业处理流程图
3.3.2 数据预处理
数据处理系统采用无人机管家专业版软件,该系统空三像点精度优于 2/3 个像素,正射影像精度不大于3个像素,成图精度满足1:1000 DOM、1:1000DEM 和 1:2000DLG精度。
3.3.3 空三加密
采用无人机管家专业版软件进行空三加密,加密点误差不大于3个像素。空三加密成果满足 1:2000 比例尺成图要求:地物点位中误差小于0.3m,高程中误差小于0.5m。
图3.12 检查点预测
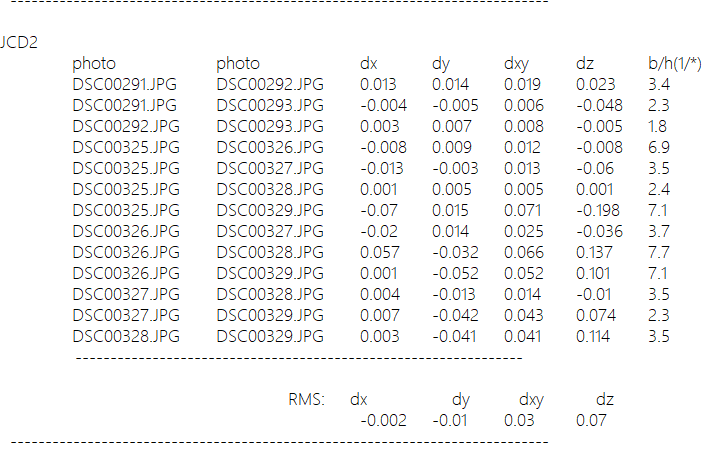
图3.13 检查点精度报告
3.3.4 DOM与DEM生产
采用无人机管家专业版软件进行DOMDEM的数据生产。通过生成密集点云得到正射影像成果,充分检查落在建筑、大型植被等处的高程点云。利用飞马智激光模块分类过滤点云,输出DEM。
图3.14点云过滤后生成DEM
3.3.5 DLG生产
利用空三成果DOM及DEM,导入测图软件,手动采集地物地貌,智激光点云分类,导出等高线,用于地形图编辑时作为辅助检查和参照。
图3.15生成等高线
图3.16 生成等高线与修测等高线对比
四、航测精度情况
4.1 空三精度情况
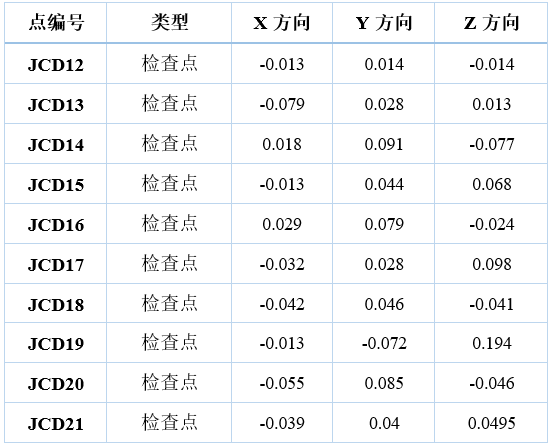
表4.1精度检查表
4.2 平面及高程精度情况
4.1平面精度情况
图4.2高程精度情况
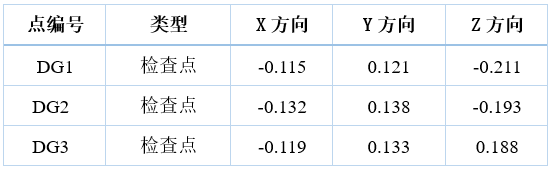
表4.2部分调绘点精度检查
4.3 空三接边精度检查
4.3.1不同架次接边位置平面精度检查
图4.3五架次接边处影像
图4.4六架次接边处影像
4.3.2不同架次接边位置高程精度检查
图4.5 五架次接边处数字高程模型
图4.6 六架次接边处数字高程模型
五、总结
5.1飞马F300无人机抗风及续航性能
内蒙地区8月份平均风力在4级以上。在5级风力情况下,飞马F300无人机的飞行航时不低于1小时,航程57公里左右。在地面分辨率为8cm时,单架次作业面积在9.5平方公里左右。同时外业影像数据获取的质量稳定,各架次间的精度满足技术设计要求。
正是因为飞马无人机的高效率,以及组装过程的便捷性,使得在外业航测实施过程中,单架无人机一天可飞行十架次,总面积达100平方公里。本次项目共动用了四架飞马F300无人机,实际耗时5天即完成了外业影像数据的采集任务,为内业工作争取了大量的时间。
除此之外,由于飞马F300无人机的智能化程度很高,在该项目中,飞手在外业飞行时,可以同时控制两架无人机开展作业。这些都为项目的进度提供了可靠的保障。

图6.1外业飞行设置
5.2 飞马F300在免像控中的优势
飞马F300无人机免像控效果显著,尤其本次项目需求1:2000线划图成果,经过多方面精度的检查,飞马F300无人机免像控的成果精度,完全符合设计要求。相比传统依靠地面像控点的作业方式,其节省了大量的外业像控采集的作业人员和作业时间,使得外业人员主要工作集中在外业调绘等工序中。同时免像控也大幅度提升了内业空三的作业效率,减少了空三所占用的大量时间。
5.3 无人机管家专业版影像处理的优势
无人机管家专业版对于影像畸变的处理算法,使得空三成果精度得到有效保障。且在无人干预即不手动添加人工连接点的情况下,空三通过率较高。通过170多架次的空三解算来看,无人机管家专业版一次性满足精度的通过率在98%以上。
5.4 无人机管家专业版在数据成果方面的优势
无人机管家专业版可以导出包括DOM、DSM、点云等成果。尤其是在DOM面积较大,成果文件大小超过2Gb时自动生成了金字塔。这样在往测图软件导入过程中,就不需要额外等待建立金字塔的过程,以及漫长的加载过程,提高了内业测图的效率。
而伴随着飞马激光的应用,无人机管家专业版中的点云分类、DEM生成、等高线生成等都为内业数据采集时提供了更加准确和详细的参考依据。在很大程度上提高了绘制等高线的效率。
六、成果照片
6.1 线划图成果与正射影像套合
图6.1 部分DOM(正射影像)及DLG(线划图)
6.2 线划图成果与数字高程模型套合
图6.2 部分DEM(数字高程模型)及DLG(线划图)
-
接收机
+关注
关注
8文章
1117浏览量
52595 -
无人机
+关注
关注
224文章
9867浏览量
174746 -
控制测量
+关注
关注
0文章
2浏览量
5418
原文标题:飞马无人机在1:2000地形图快速成图中的应用
文章出处:【微信号:feimarobotics2015,微信公众号:飞马机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论