 使用加速度计实现倾斜角度计算
使用加速度计实现倾斜角度计算
手机现在通常会在用户旋转手机时更改屏幕方向。本文讨论了将加速度计的输出转换为倾斜角度的基本原理和所需计算。
确定系统倾斜或倾斜度的一种常用方法是集成陀螺仪的输出。尽管这种方法很简单,但与零偏置稳定性相关的误差会随着积分周期的增加而迅速复合,即使在器件静止时也会导致明显的旋转。
在某些应用中,系统上的净加速度或力量时间是重力,加速度计可用于测量静态倾斜角度或倾斜度。这些应用包括游戏,数码相机中的地平线检测,以及检测工业和医疗应用中设备的前进方向。
使用加速度计进行倾斜感应的基本假设是唯一的加速度刺激是与重力相关的刺激。在实践中,可以对信号输出执行信号处理以从输出信号中去除高频内容,因此可以容忍一些AC加速度。
倾斜感应使用重力矢量及其在加速度计轴上的投影,确定倾斜角度。由于重力是直流加速度,因此任何导致额外直流加速度的力都会破坏输出信号并导致计算错误。 DC加速度的来源包括车辆以恒定速率加速的时间段和旋转在加速度计上引起向心加速度的装置。此外,当重力投影在感兴趣的轴上时,通过重力旋转加速度计会引起明显的AC加速度。在计算倾斜度之前对加速度信号进行任何滤波会影响输出结束到新静态值的速度。本文讨论将加速度计输出转换为倾斜角度的基本原理。该讨论包括如何计算单轴,双轴或三轴解的理想倾角。此外,还包括一些有关校准的基本信息,以减少偏移和灵敏度不匹配的误差。
倾斜/倾斜计算
单轴倾斜计算
在仅需要有限角度的倾斜感应的应用中,并且具有稍微粗略的分辨率,可以使用单轴设备(或多轴设备的单轴)。例如,在图1中,单个轴(在该示例中为x轴)是通过重力旋转。因为该方法仅使用单个轴并且需要重力矢量,所以计算的倾斜角度仅在设备被定向时使得x轴始终在重力平面中才是准确的。围绕其他轴的任何旋转都会减小x轴上加速度的大小,并导致计算出的倾斜角度出现误差。

图1:用于倾斜感应的单轴。
参考基本三角学,重力矢量在x轴上的投影产生的输出加速度等于加速度计x轴和地平线之间的角度的正弦。地平线通常被认为是与重力矢量正交的平面。对于重力的理想值1 g,输出加速度为:

使用单轴解决方案时,请注意灵敏度 - 即某些变化的输出变化在输入中 - 倾斜度计算随着水平线和x轴之间的角度增加而减小,当角度接近±90°时接近零。这可以在图2中看到,其中输出加速度(以g为单位)相对于倾斜角绘制。在±90°附近,倾斜角度的大幅变化会导致输出加速度的微小变化由于倾斜计算是以数字方式完成的,因此输出加速度表示为每个最低有效位(LSB)或代码的恒定加速度,可从模数转换器(ADC)或直接从数字输出部件获得。由于输出分辨率是恒定加速度,因此倾斜度的分辨率是可变的,最佳分辨率接近0°,最差分辨率为±90°。
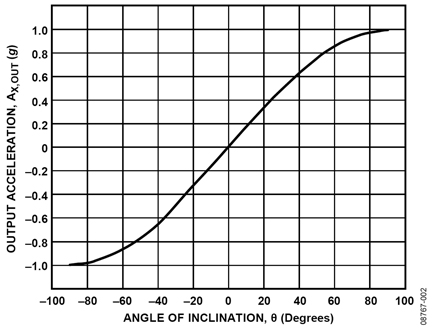
图2:输出加速度与单轴倾斜传感的倾斜角度。图3和图4显示了1°和0.25°倾斜角度步进的增量灵敏度。增量灵敏度是输出变化,以毫克表示,每个倾斜角度步长,或者
其中:
N是当前角度。
P是步长。
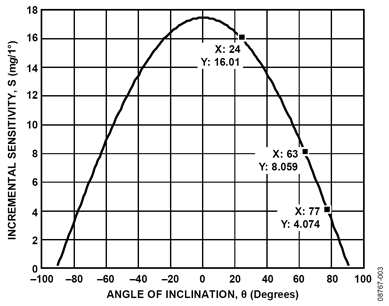
图3:1°步长的增量倾斜灵敏度。
这些曲线可用于确定测量输出加速度时所需的最小分辨率,以满足整个所需的倾斜分辨率应用范围。例如,设计最大步长为1°时,±63°范围内至少需要8 mg/LSB的分辨率。类似地,要在±63°的范围内实现0.25°的最大步长,需要至少2 mg/LSB的分辨率。请注意,如果存在足够的任何一个,则可以使用过采样来实现更好的分辨率。
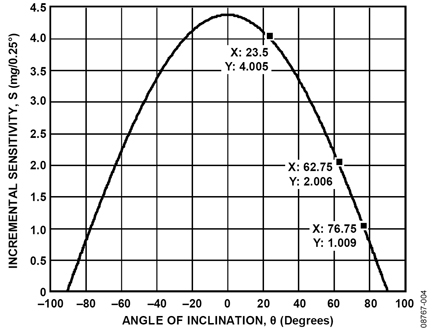
图4:0.25°步长的增量倾斜灵敏度。
因为加速度计的输出服从正弦曲线当它通过重力旋转时,从加速度到角度的转换是使用反正弦函数完成的,

其中倾角θ是弧度。
如果是窄的需要倾斜范围,可以使用线性近似来代替反正弦函数。线性近似与小角度的正弦近似有关,

其中倾角θ为弧度。

其中倾角θ为弧度。
转换为度数是通过将等式5的结果乘以(180/π)。图5显示了使用反正弦函数和k等于1的线性近似之间的比较。随着倾角的大小增加,线性逼近开始失败,并且计算的角度偏离实际角度。
因为计算出的角度是相对于实际倾斜角度绘制的,所以线性近似似乎在末端附近弯曲。这是因为线性近似仅在与输出加速度相比时是线性的,并且如图2所示,输出加速度的行为类似于实际倾斜角度增加。但是,反正弦函数应该产生与实际倾斜角度一对一的输出,使得计算出的角度在与实际倾斜角度作图时是一条直线。
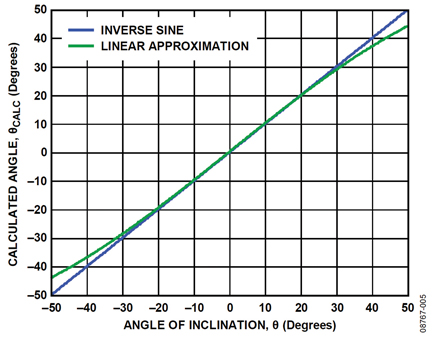
图5:倾斜角计算的反正弦函数和线性近似的比较
例如,如果倾斜感应的所需分辨率为1°,则误差为±0.5°是可接受的,因为它低于舍入误差的计算。如果在k等于1时绘制实际倾斜角度与计算出的倾斜角度之间的误差,如图6所示,线性近似的有效范围仅为±20°。如果调整比例因子使得误差最大化,但保持在计算舍入限制内,则线性近似的有效范围增加到大于±30°。
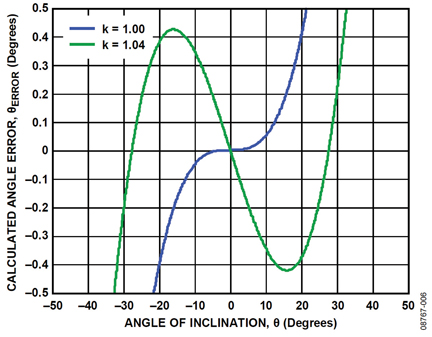
图6:计算角度不同比例因子的误差。
双轴倾斜计算
单轴倾斜检测的一个限制是需要高分辨率ADC或数字输出来实现大范围的有效倾角,如图所示图3和图4.另一个限制是单轴测量不能提供360°测量,因为在倾斜度N°时产生的加速度与在180° - N°倾角下产生的加速度相同。 》对于某些应用,这是可以接受的,但对于需要更高分辨率的应用,或能够在完整的360°弧中区分倾斜角度的能力,第二轴(如图7所示)或第二传感器是必要的。如果使用第二个传感器,它应该定向为第一个传感器的传感轴。
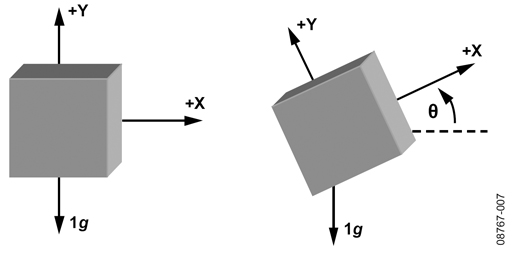
图7:用于倾斜传感的两个轴。
包括三个主要好处确定倾斜角度的第二轴。以下各节介绍了这些优点。
恒定灵敏度
使用第二轴的第一个主要好处是轴的正交性。如在单轴解决方案中,由x轴检测的加速度与倾斜角度的正弦成比例。由于正交性,y轴加速度与倾斜角的余弦成比例(见图8)。随着一个轴的增量灵敏度降低,例如当该轴上的加速度接近+1 g或-1 g时,另一个轴的增量灵敏度会增加。
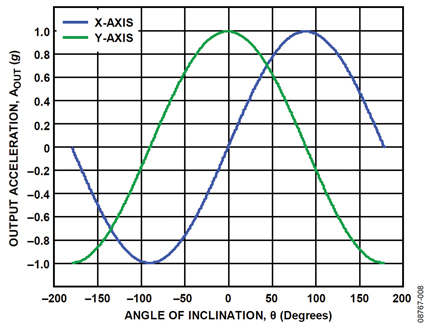
图8:双轴倾斜传感的输出加速度与倾斜角度的关系
将测量的加速度转换为倾斜角度的一种方法是计算x轴的反正弦和反向y轴的余弦,类似于单轴解。但是,更简单,更有效的方法是使用两个值的比率,结果如下:


其中倾角, θ,以弧度为单位。
与单轴示例不同,使用两个轴的比率来确定倾斜角度使得确定增量灵敏度非常困难。相反,在给定所需的倾斜分辨率的情况下,确定最小必要加速度计分辨率更有用。鉴于一个轴的增量灵敏度随着另一个轴的减小而增加,最终结果是大致恒定的有效增量灵敏度。这意味着选择具有足够分辨率的加速度计以在一个角度上实现所需的倾斜步长对于所有角度都是足够的。为了确定最小必要的加速度计分辨率,检查等式6以确定分辨率限制的位置。因为每个轴的输出依赖于倾斜角的正弦或余弦,并且每个函数的倾斜角度相同,所以最小可分辨角度对应于最小可分辨加速度。
如图3和图3所示。如图4所示,正弦函数在0°附近具有最大的变化率,并且余弦函数在此时具有最小的变化率。因此,在y轴上的加速度变化之前识别出由于倾斜变化引起的x轴加速度的变化。因此,系统在0°附近的分辨率主要取决于x轴的分辨率。为了检测P°的倾斜度变化,加速度计必须能够检测到近似的变化:
图9可用于确定最小必要加速度计分辨率 - 或最大加速度计量表factor - 对于所需的倾斜步长。请注意,增加的加速度计分辨率与加速度计比例因子的减少以及检测输出加速度的较小变化的能力相对应。因此,当选择具有适当分辨率的加速度计时,比例因子应小于图9中所示的预期倾斜步长的限制。
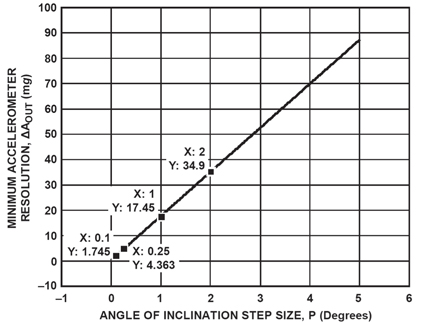
图9:所需角度的最小加速度计分辨率倾斜分辨率的降低。
减少与重力平面对齐的依赖性 - 使用至少两个轴的第二个主要好处是,与单轴解决方案不同,在x轴以外的任何轴上倾斜都会导致即使存在第三轴的倾斜,使用第二轴也可以测量精确的值。这是因为有效的增量灵敏度与感兴趣的轴上的重力的和 - 平方(RSS)值成正比。
当重力完全包含在xy平面中时,检测到的加速度的RSS值轴理想地等于1克。如果在xz或yz平面中存在倾斜,则由于重力引起的总加速度减小,这也降低了有效的增量灵敏度。反过来,这增加了给定加速度计分辨率的倾斜步长,但仍提供精确的测量。从倾斜度计算得到的角度对应于xy平面中的旋转。
如果系统足够倾斜,使得在xy平面中由于重力引起的加速度非常小,则倾斜角度步长将为太粗糙而无用。因此,建议限制xz或yz平面的倾斜完整的360°倾斜感应
使用第二个轴的第三个主要好处是能够区分每个象限并测量整个360°弧的角度。如图10所示,每个象限都有一个与x轴和y轴加速度相关的不同符号组合。
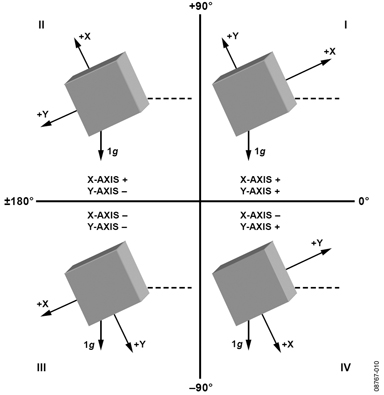
图10:象限检测的倾斜角度和加速度符号。 》如果操作数AX,OUT/AY,OUT为正,则反正切函数在象限I中返回一个值;如果操作数为负,则反正切函数返回象限IV中的值。因为象限II中的操作数是负数,所以当角度在该象限中时,应该在计算结果中添加180°的值。
因为象限III中的操作数是正的,所以180°的值应该是当角度在该象限中时,从计算结果中减去。计算出的角度的正确象限可以通过检查每个轴上测量的加速度的符号来确定。
三轴倾斜计算
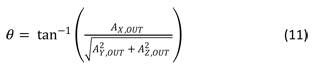
当引入第三个轴时,传感器的方向可以在完整的球体。矩形(x,y,z)到球面(ρ,θ,φ)转换的经典方法可用于将xy平面中的倾斜角度θ与来自重力矢量的倾斜角度相关联,φ ,对于每个轴的测量加速度,如下:


假设唯一测量的加速度是由重力引起的,分母是等式10中的操作数可以用常数替换,理想情况下为1,因为当唯一的加速度是重力时,所有轴的RSS值是恒定的。角度如图11所示,其中图11c仅显示xy平面中的θ,图11d显示φ为z轴和重力矢量之间的角度。
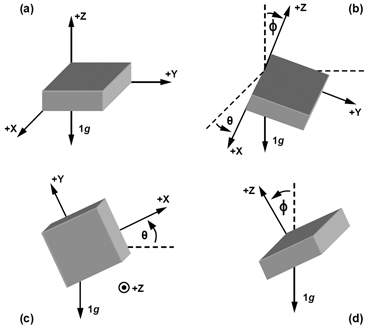
图11:球面坐标系的角度。由于三轴方程的方程与单轴和双轴方程的方程式之间的相似性,三轴解的分析与单个方法相同。 - 和双轴方法相结合。根据两个正交轴的比率测量θ的好处,以及所需的倾斜分辨率需要最小的加速度计分辨率,如公式8所述。
φ的测量值对应于单轴解决方案的倾角测量值以及用于确定在期望范围内的特定倾斜角分辨率所需的最小加速度计分辨率的方法。不同之处在于使用反余弦函数确定φ导致最大增量灵敏度,当φ为90°且最小增量灵敏度为0°和180°时。
类似于图3和图4的曲线可以是通过在等式2中用余弦代替正弦来生成。重要的是要注意,尽管θ的范围是-180°到+ 180°,但φ的范围仅为0°到180°。 φ的负角度会导致θ的角度变为负值。
使用三个轴进行倾斜感应的另一种方法是从参考位置单独确定加速度计的每个轴的角度。参考位置被视为设备的典型方向,其中x轴和y轴在地平线的平面中(0g场)和z轴与地平线(1g场)正交。这在图12中示出,其中θ是加速度计的地平线和x轴之间的角度,ψ是加速度计的地平线和y轴之间的角度,并且φ是重力矢量和z轴。当在x轴和y轴上的初始位置0 g和z轴上的1 g时,所有计算的角度都将是0°。
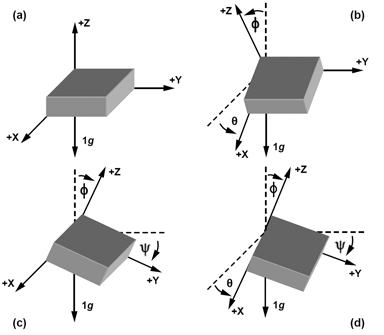
图12:独立倾斜感应的角度。
基本三角法可用于显示倾角可以使用公式11,公式12和公式13计算。
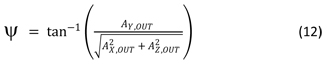
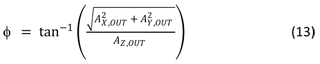
公式13中操作数的明显反转是由于初始位置是1 g字段。如果希望地平线作为z轴的参考,则可以反转操作数。正角度意味着加速度计的相应正轴指向地平线以上,而负角度意味着轴指向地平线以下。因为使用反正切函数和加速度比率,所以提到的好处在双轴示例中应用,即有效增量灵敏度是恒定的,并且可以精确测量单位球体周围所有点的角度。
校准偏移和灵敏度不匹配误差
应用笔记是在假设使用理想的加速度计的情况下完成的。这对应于没有0 g偏移且具有完美灵敏度的设备(对于模拟传感器表示为mV/g,对于数字传感器表示为LSB/g)。尽管传感器经过修整,但这些设备本质上是机械的,这意味着系统组装后零件上的任何静态应力都可能影响偏移和灵敏度。这与工厂校准的限制相结合,可能导致超出应用允许极限的误差。
偏移误差的影响
为了证明误差有多大,首先想象一下完美的双轴解决方案灵敏度,但在x轴上偏移50毫克。在0°时,x轴读数为50mg,y轴读数为1g。得到的计算角度为2.9°,导致误差为2.9°。在±180°时,x轴将报告50 mg,而y轴将报告-1 g。这将导致计算出的角度和-2.9°的误差。对于该示例,计算出的角度与实际角度之间的误差如图13所示。由于偏移引起的误差不仅可以与系统的期望精度相比较大,而且可以变化,因此难以简单地校准误差角。当包含多个轴的偏移时,这变得更加复杂。
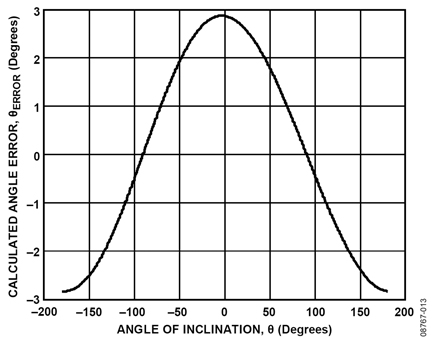
图13:由加速度计偏移引起的计算角度误差。
灵敏度不匹配误差的影响
主要误差分量由于双轴倾斜感应应用中的加速度计灵敏度是指感兴趣的轴之间存在灵敏度差异(与单轴解决方案相反,其中实际灵敏度与预期灵敏度之间的任何偏差导致误差)。因为使用了x轴和y轴的比率,所以如果灵敏度相同,则大部分误差被消除。
作为加速度计灵敏度不匹配的影响的示例,假设使用双轴解决方案具有完美的偏移调整,在y轴上具有完美的灵敏度,在x轴上具有+ 5%的灵敏度。这意味着在1g场中,y轴报告1g,而x轴报告1.05g。图14显示了由于此灵敏度不匹配导致的计算角度误差。与偏移误差类似,由于加速度计灵敏度不匹配引起的误差在整个旋转范围内变化,使得在计算倾斜角度之后难以补偿误差。通过改变y轴灵敏度进一步减少不匹配会导致更大的误差
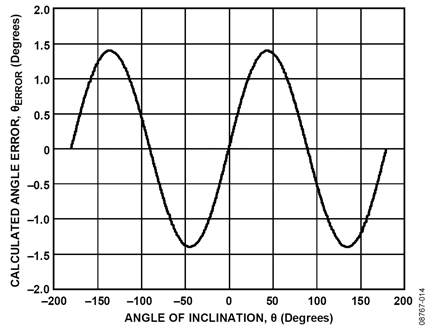
图14:由于加速度计灵敏度不匹配导致的计算角度误差。
基本校准技术
当组合由于偏移和灵敏度不匹配引起的误差时,误差会变得非常大,远远超出可接受范围倾斜传感应用中的限制。为减少此误差,应校准偏移和灵敏度,并使用校准的输出加速度计算倾斜角度。当包括偏移和灵敏度的影响时,加速度计输出如下:

其中:
AOFF是偏移误差,以g为单位。
增益是增益加速度计,理想情况下值为1.
AACTUAL是加速度计上的实际加速度和所需的值,以g表示。
简单的校准方法是假设增益为1并测量偏移量。然后,该校准将系统的精度限制为未校准的灵敏度误差。可以通过将感兴趣的轴放入0g场并测量输出来完成简单的校准方法,输出将等于偏移。然后,在处理信号之前,应从加速度计的输出中减去该值。这通常被称为不转弯或单点校准,因为设备的典型方向将x轴和y轴置于0 g场中。如果使用三轴设备,则z轴应包含至少一个转弯点或第二个点。
更准确的校准方法是每个感兴趣的轴使用两个点(三个点最多六个点) - 轴设计)。当轴放入+1 g和-1 g字段时,测量的输出如下:
此类校准还有助于最小化横轴灵敏度效应,因为当对感兴趣的轴进行测量时,正交轴在0g场中。首先从加速度计测量值中减去偏移量,然后将结果除以增益,即可使用这些值。

其中AOUT和AOFF以g为单位。
AOFF的计算等式15至等式19中的增益假设加速度值A + 1g和A-1g以g为单位。如果使用以mg为单位的加速度,则公式17中AOFF的计算保持不变,但公式18中的增益计算应除以1,000,以说明单位的变化。
-
DC
+关注
关注
8文章
3567浏览量
677785 -
AC
+关注
关注
1文章
584浏览量
83953 -
加速度计
+关注
关注
6文章
660浏览量
45405
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论