 利用导航辅助设备和传感器确保车辆RF链路失灵时的安全
利用导航辅助设备和传感器确保车辆RF链路失灵时的安全
拥有雄厚财力的大公司正在积极寻求自动驾驶汽车和机器;但由于存在生命和法律责任,设计师面临着确保导航性能最佳的压力。这意味着传感器备份和冗余。
本文介绍了GPS和Wi-Fi等无线导航辅助工具无法运行的情况。然后,它将概述一种设计和实施方法,该方法使用替代和补充的导航辅助设备和传感器用于自动驾驶车辆和机器人。特别是,它将指出有助于补偿RF连接的位置和状态的变幻莫测的选项。
技术采用的未感知的副作用
从产品的交付服务和披萨,来自“Total Recall”的Johnny Cabs,汽车制造商,零售商和服务公司(如优步)都在为机器人和车辆提供大量资源,这些机器人和车辆具有位置感知能力并适应其直接环境。
同时,联邦政府已经为各州监管自动驾驶汽车开了绿灯,我们正处在一个不断发展的时代,这项新技术刚刚开始融入运输网络。作为设计工程师,我们需要确保安全地完成这项任务,特别是考虑到生命和责任的发挥。
虽然GPS等导航设备已经变得几乎不可或缺,但似乎我们越依赖技术,即使我们的设备执行的平凡任务,我们的能力也越差。它已经到了人们依靠GPS导航他们每天遍历的地方的地步。这可能会令人不安,特别是当我们意识到我们的技术可能会失败时。当他们这样做时,我们冒着无助的风险;
例如,由于GPS系统努力实现更精细的分辨率以确保准确性和可靠性,有时候信号丢失可能会导致灾难性的影响而没有某种形式的系统备份。任何使用GPS的人都知道在进入长隧道时GPS信号会发生什么。
补偿GPS信号丢失的一种常用技术是蜂窝地理定位。这仅依靠信号强度来获得位置感。但是,由于手机信号塔可以识别自身,因此知道它们在地图上的物理存在位置意味着设备RF前端的接收信号强度指示(RSSI)功能可以使用该信息对大致位置进行三角测量。
也就是说,即使在手机信号塔之间,大气条件也会影响信号强度。在蜂窝塔和自导航接收器之间随机抽烟的随机和不可预测的事情会影响信号强度,足以导致位置不准确。
蜂窝技术的进步现在允许其他技术,如载波相位比较和时间戳备份信号强度作为提高地理定位和位置分辨率的手段。并且,导航系统不仅可以使用蜂窝数据。
随着时间的推移,更多固定信号源可用于导航自我感知系统,以确定其精确位置。例如,现代固定Wi-Fi节点被用作可以像导航信标一样工作的信号源。甚至无线电台和中继器也可用于此目的。
尽管如此,有时候条件可能会使基于RF的三角测量和导航系统完全失效。这些可以包括地面噪声源,例如坠落和电弧电力线,恐怖主义干扰,大气条件,或甚至基于空间的干扰,例如日冕物质抛射或电磁干扰,这可能使得基于RF的系统的几乎所有频带完全不可操作。
虽然人类控制着操作车辆,但这可能只是导航的不便。然而,当一台机器单独负责将车辆保持在路上时,随着时间的推移,任何位置误差都会累积变得更加严重,并且当汽车和卡车偏离车道分隔线并错过出口和入口时会造成严重破坏。
这里智能设计师通过实施相互支持的双重,冗余和技术独立的传感器技术来对冲他们的系统。即使在主要信号丢失的短时间内,也需要使用替代的导航和定位技术。
一种特别吸引人的技术是使用高精度惯性导航系统。加上紧凑而密集的详细路线图存储,具有合适处理器的惯性导航系统可以叠加最后已知位置和累积惯性导航传感器技术,以便在可靠定位信号不可用时进行插值。
独立但纠缠不清
GPS,蜂窝或Wi-Fi地理定位等导航系统都依赖于相同的RF介质。然而,在不依赖无线连接的情况下串联运行的替代传感技术已被证明是许多军事系统中具有成本效益但可靠的解决方案。在这里,独立的传感和决策技术与集成的任务执行处理器并存(图1)。该架构允许基于信号完整性,可靠性以及比较结果和决策等因素在更高级别进行决策。
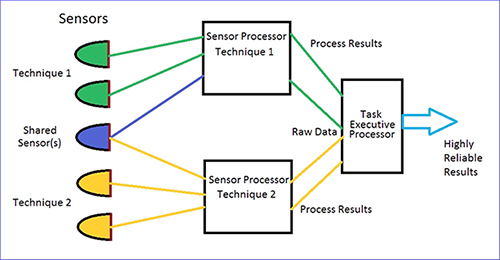
图1:双冗余传感系统可以使用自己独特的传感器或共享传感器来独立得出结论。管理任务执行处理器可以监视结果和/或原始数据,以确定系统是否有故障。这可以为系统主机处理器提供更高可靠性的数据。 (来源:Digi-Key)
为了实现这一目标,主要和备用传感器技术必须通过相互检查来实现冗余存在,并在任何一方检测到或检测到问题和故障时做好准备。这些可以像看门狗类型的技术一样简单,它向另一个系统提供心跳以指示它正在运行。相反,它可以是一个更复杂的系统,来回呈现原始数据,以确保每个系统得出相同的结论。请注意,这两种技术可以共享相同的映射技术。
当RF不可用时,独立的惯性导航系统可以成为一种理想的解决方案。然而,可靠的基于陀螺仪的惯性变化和定位系统传统上过于庞大,昂贵且难以用作检测惯性差异的手段,并且它们易于发生机械故障。激光陀螺仍然很昂贵,但消除了机械故障模式。
推动技术发展
幸运的是,手机行业推动半导体加速度计产品与昨天的激光陀螺仪系统的性能相媲美,为这种设计困境提供了紧凑且经济的解决方案。一些优质半导体制造商提供紧凑型加速度计和半导体陀螺仪器件,参考设计和开发套件,以帮助设计人员加快速度。
例如,飞兆半导体/安森美半导体MEMS传感器技术非常适合表现良好以此身份。凭借高达9轴的感应,其基于融合的算法方法使用专有的AttitudeEngine运动处理器,以低单位成本提供高度的功能。其设计人员还强调使用低功耗,集成的能量管理技术延长电池寿命。
虽然飞兆半导体(现为安森美半导体的一部分)等传感器供应商在制造多轴传感器方面投入了大量精力易于使用,您仍需要了解错误纠正和准确性的复杂性。这非常重要,因为惯性误差表现出累积效应。这种误差的一个来源称为锥形,它可能受采样率的影响(图2)。
误差校正可以最大限度地减少锥形运动下的方向漂移。这是1轴在空间中扫描锥体而不绕运动轴本身的方向旋转的地方。锥形漂移率与锥形振幅的平方成正比,与锥形频率成反比。
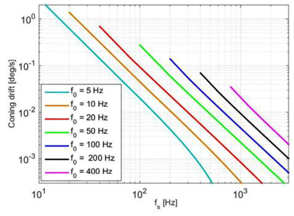
图2:理解和实现纠错对于可能出现累积误差的任何类型的惯性导航系统来说,锥形和划桨是至关重要的。 (资料来源:Fairchild/安森美半导体)
与此相关的是对划船运动的理解。当一个陀螺仪功能和一个正交加速度计通道以相同频率感测两个异相振荡时,会发生这种情况。如果信号的采样速度不够快,则划桨运动会导致第三通道上的速度积分漂移。
飞兆半导体提供了一种紧凑的传感器芯片,其特性很好,可以补偿这些和其他潜在误差源。例如,FIS1100可用于完整的惯性导航系统,并可通过简单的I²C接口提供三轴加速度计和陀螺仪传感,以便于外设处理器。
有几种学习和设计支持板,如FEBFIS1100MEMS_IMU6D3X,支持陀螺仪和加速度计传感,以及FM1030T,用于3D定位。一个不错的OEM选择可能是紧凑的FMT1020T评估板(图3)。这可以使用串行I²C,SPI和UART输出测量和处理加速度计,陀螺仪,磁力计和3轴感应。
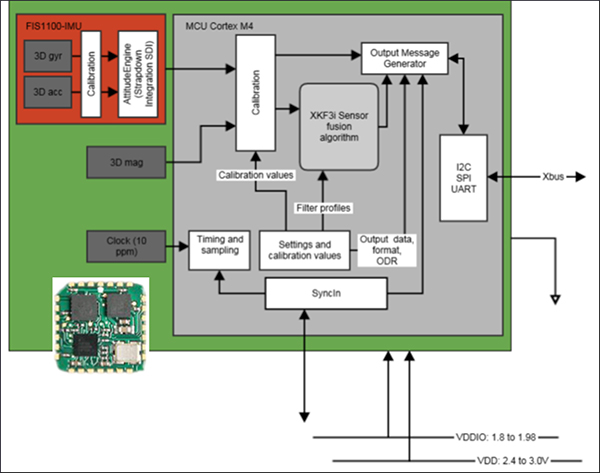
图3:飞兆半导体FMT1020T等参考设计允许工程师使用剪切和粘贴功能来创建自己的电路板。许多紧凑型模块可用于OEM或测试设计方法,从而加快产品上市时间。 (资料来源:Fairchild/安森美半导体)
FMT1020T包含传感器本身(FIS1100)以及ARM®Cortex®-M4 MCU以卸载主机CPU。 MCU还运行Fairchild XKF3传感器融合算法。这是基于卡尔曼滤波器来估计相对于地球固定帧的3D方向。可提供多种过滤器配置文件,从一般到高动态,有大量运动。
备份备份
备份备份可以使用像博世这样的霍尔效应传感设备BMM150用于使用磁场测量技术监测XYZ轴的变化。该集成器件使用专有的基于FlipCore霍尔效应的XYZ轴感应,为任何惯性处理器引擎提供磁力计和基于罗盘的感应。同样,简单的SPI串行接口可以为任何高端核心处理器技术提供简化的外设功能。
根据速度和加速度的变化知道位移的变化不会让你导航。使用高度精确的地图数据是允许位置感知系统基于惯性变化持续导航的关键。这就是NAND架构驱动的存储器件等高密度闪存技术变得非常有用的地方。它们允许系统在紧凑,低功耗的电路板中存储具有高分辨率的详细本地化映射,这些电路板可以独立地与蜂窝,Wi-Fi和GPS系统共存。
结论
目前尚不清楚立法行动将如何影响这一新兴技术,但仅责任问题决定了在所有条件下实现最佳绩效的冗余设计方法。
GPS,蜂窝和Wi-Fi等无线技术是准确定位和定位信息的第一线。然而,这些需要由自我监控系统支持,该系统使用相对和绝对传感信息的组合来确保在无线信号发生故障时车辆保持在轨道上;这些传感器需要冗余策略。
最终,运营商将负责控制他们的车辆。然而,当自动驾驶技术进步到几乎100%的信心时,自动驾驶汽车,飞机,火车和机器人肯定必须实施冗余传感技术和方法。
-
机器人
+关注
关注
206文章
26964浏览量
201253 -
RF
+关注
关注
65文章
3023浏览量
165629 -
导航
+关注
关注
7文章
502浏览量
41467
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论