 基于规则的预测算法和基于机器学习的预测算法
基于规则的预测算法和基于机器学习的预测算法
如果一辆车子要实现自动驾驶,那么障碍物感知绝对是最基础也是最核心的功能。Apollo 障碍物感知系统分为3D 检测、ROI 滤波、识别、运算、感知五大板块。其感知过程如下:首先 LiDAR 探测到信号,传递给 ROI 的 Filter,滤波后的信号通过 Obstacle Segmentation 和 Detection 做识别,然后是 Tracking,Apollo 在运算这一块采用的是 NVIDIA GPU,运算能力强劲,可以实现 10Hz 的输出,最后是 Obstacles 感知。
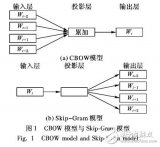
当系统感知到障碍物后,需要对障碍物进行行为预测,如障碍物是否是动态的,其下一步动作是什么。Apollo 障碍物行为预测系统采用 MLP 多层感知机制,通过深度神经网络与规划算法,达到精准预测路径的目的。
训练MLP深度学习模式有2个前提条件:
请从官网下载并安装Anaconda软件
运行以下命令安装必要的依赖项:
安装numpy: conda install numpy
安装tensorflow: conda install tensorflow
安装keras (version 1.2.2): conda install -c conda-forge keras=1.2.2
安装h5py: conda install h5py
安装protobuf: conda install -c conda-forge protobuf
接下来要遵循的步骤是使用发布的演示数据来训练MLP模型。为了方便起见,我们把阿波罗作为本地阿波罗储存库的路径,例如,/home/username/apollo
如果用来存储离线预测数据的文件夹不存在的话,则使用命令
mkdir APOLLO/data/prediction
创建一个新文件夹
打开apollo/modules/prediction/conf/prediction.conf.通过改变--noprediction_offline_mode成--prediction_offline_mode来启动离线模式
在apollo文件夹中用bash docker/scripts/dev_start.sh启动dev docker
在apollo文件夹中用bash docker/scripts/dev_into.sh进入dev docker
在docker中,/apollo/下运行bash apollo.sh build进行编译
在docker中,/apollo/下通过python docs/demo_guide/rosbag_helper.py demo_2.0.bag下载演示用rosbag
在docker中,/apollo/下通过bash scripts/prediction.sh start_fe运行预测模块
打开一个新的终端窗口,使用步骤4进入apollo dev docker
在新的终端窗口中,在/apollo/下,使用rosbag play demo_2.0.bag播放演示rosbag
当rosbag在新终端中运行结束后,在原来的终端按下Ctrl + C停止预测模块。
在/apollo/data/prediction/文件夹中检查是否有feature.0.bin文件存在
在docker中进入
/apollo/modules/tools/prediction/mlp_train/
使用python generate_labels.py -f /apollo/data/prediction/feature.0.bin标记数据。然后在/apollo/data/prediction/文件夹中检查是否有feature.0.label.bin文件存在
更新:
在docker中进入
/apollo/modules/tools/prediction/mlp_train/
使用python generate_labels.py /apollo/data/prediction/feature.0.bin /apollo/data/prediction/feature.0.label.bin标记数据。然后在/apollo/data/prediction/文件夹中检查是否有feature.0.label.bin文件存在
在docker中,/apollo/modules/tools/prediction/mlp_train/下,通过python generate_h5.py -f /apollo/data/prediction/feature.0.label.bin生成 H5文件。然后检查feature.0.label.h5是否被创建
更新:在docker中,/apollo/modules/tools/prediction/mlp_train/下, 通过python generate_h5.py /apollo/data/prediction/feature.0.label.bin/apollo/data/prediction/feature.0.label.h5生成 H5文件。然后检查feature.0.label.h5是否被创建
退出dev docker
进入APOLLO/modules/tools/prediction/mlp_train/proto/文件夹并运行protoc--python_out=./fnn_model.proto来生成fnn_model_pb2.py
进入APOLLO/modules/tools/prediction/mlp_train/文件夹通过python mlp_train.py APOLLO/data/prediction/feature.0.label.h5启动训练模型
模型的评估报告在APOLLO/modules/tools/prediction/mlp_train/evaluation_report.log
模型会被存放在APOLLO/modules/tools/prediction/mlp_train/mlp_model.bin,如果你觉得你的模型更好可替换在APOLLO/modules/prediction/data/mlp_vehicle_model.bin中原来的模型
-
深度学习
+关注
关注
73文章
5232浏览量
119889 -
MLP
+关注
关注
0文章
56浏览量
4072
原文标题:技术文档 | 如何训练MLP深度学习模式
文章出处:【微信号:Apollo_Developers,微信公众号:Apollo开发者社区】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基于纹理复杂度的快速帧内预测算法
人脸检测算法及新的快速算法
谁会小波神经网络预测算法的设计?
请问基于模型预测算法的DC/DC变换器电压出现很大跳变是什么原因?
基于YOLOX目标检测算法的改进
基于网络表示学习与随机游走的链路预测算法
基于变分自编码器的海面舰船轨迹预测算法
基于粒子群算法的车联网交通流量预测算法






 工商网监
工商网监
评论