 一种用于复杂轨迹自动漂移的控制器架构
一种用于复杂轨迹自动漂移的控制器架构
对自动驾驶车辆的整体安全性和鲁棒性来说,在稳定操控范围外的操纵能力相当重要。因此,本文提出了一种用于复杂轨迹自动漂移的控制器架构。在不假设车辆工作在平衡点附近的情况下,设计了针对非特定路径的控制器。提出了物理上有深刻意义的控制律:采用车辆航向角速度跟踪路径,横摆角加速度用于镇定质心侧偏角。通过非线性模型反演与下层轮速控制相结合,在大范围工况下精确地实现所需求的状态微分。在全尺寸车辆上进行的实车试验表明,在不同曲率、速度和质心侧偏角下可以很好地跟踪轨迹。
传统车辆控制架构中通常采用独立的侧向/纵向控制,并且假定车辆处于侧滑动力学稳定范围内。然而,超出车辆的操控极限时会产生强输入耦合和横摆/侧滑不稳定性,导致这种简化方法失效。专业驾驶员在漂移中可以同时实现对车辆侧滑和行驶路径两者的精确控制,尽管是完全在车辆稳定性极限范围外操纵的。自动驾驶漂移控制算法可以将车辆可用状态空间扩展到极限范围外,从而确保自动驾驶车辆最广泛的机动范围。
早期文献中,Velenis[9]和Hindiyeh等人[4]分别通过仿真和实验,研究了车辆状态在漂移平衡点下的镇定。因为在标准输入下(转角和驱动力矩)系统是欠驱动的,所以同时跟踪路径和镇定质心侧偏角并不简单。
最近的一些研究已经在简单的定圆试验中证明了这一点。Werling等人[11]提出的控制器同时考虑了质心侧偏角镇定和路径跟踪,而Goh等人[3]的策略则是明确的跟踪路径。但是由于在车辆建模和控制器设计时的进行了严格假设,这些方法不能轻易地扩展到更复杂的轨迹。
已有文献中,关于漂移的研究都使用了在大范围内精确的车辆模型。Ono[6]和Voser等人[10]使用了双状态单轨模型研究漂移的不稳定动力学。也有学者将力作为直接输入[3] [4]并且对转向和油门延迟进行精确建模[11]的三状态单轨模型用于试验验证控制器的设计。Velenis等人[9]基于线性化后的具有稳态载荷转移和车轮动力学的双轨车辆模型,设计了线性二次型调节器。在运动方程的模型精度和可控性之间取得平衡,仍需进一步研究。
与这些方法相比,本文设计了一种用于处理复杂轨迹工况的自动漂移控制器。以道路曲线坐标系下的质心侧偏角误差和侧向位移误差作为控制目标。首先在不需要假设特定的车辆模型或车辆状态处于平衡点附近的情况下,推导出控制器设计所需的动力学模型。由此得到的控制律,用车辆状态微分来表示,十分简单直观。利用漂移时产生的侧偏和横摆动力学解耦:直接采用车辆航向角速度跟踪路径,通过控制车辆横摆角速度相对于航向角速度的快慢,可以同时镇定质心侧偏角。
为了实现这一控制律,需要车辆模型将这些期望的状态微分映射到输入。通过非线性模型反演与下层的轮速控制相结合,实现复杂轨迹下大范围工况的良好准确度,而不是依靠过于简化的假设。在全尺寸测试车辆MARTY(图1)上的试验验证了算法在曲率在1/7到1/20m间变化和速度在25km/h到45km/h间变化的轨迹以及-40°的质心侧偏角工况下的有效性。
图1 自动漂移测试中的MARTY车辆
2试验车辆与车辆模型
本节首先介绍了在曲线坐标系下的基于力输入的单轨模型的运动方程,然后介绍了轮胎力模型。
2.1运动方程
2.1.1 路径跟踪状态和动力学
车辆模型如图2所示,有三个状态变量:横摆角速度r、速度V和质心侧偏角β。考虑路径跟踪后,引入了其他几个状态变量。车辆航向角是车辆速度矢量在给定的惯性坐标系的方向,的动力学方程:

图2 参考路径曲线坐标系下的三状态单轨模型
利用曲线坐标系使车辆跟踪参考轨迹,侧向位移误差e是车辆质心到参考轨迹的最近点的距离,s是沿路径到这个点的距离。参考航向角是s处路径相对于惯性坐标系的正切角,航向角误差 ,是车辆航向角与参考航向角之差。e的动力学方程表示为:
,是车辆航向角与参考航向角之差。e的动力学方程表示为:

进行一些简化假设:
 和
和 ,由于闭环控制中
,由于闭环控制中 逐渐变小,因此假设合理。
逐渐变小,因此假设合理。
最后, 的动力学方程为
的动力学方程为

其中 是参考轨迹在s处的曲率。
是参考轨迹在s处的曲率。
2.1.2 车辆状态和动力学
基于如图2所示的单轨自行车模型进行非线性车辆模型反演,其中作用于车辆的力包括前轴侧向力Fyf,后轴侧向力Fyr和后轴纵向力Fxr,运动方程为:

其中δ为转向角,a,b分别是前后轴到质心的距离,m是车辆质量。
2.2前轴轮胎力建模
前轴侧向力Fyf采用Fiala刷子轮胎模型[2]表示,文献[3] [4]中的漂移控制器中也采用了该模型。

其中Fz是轮胎垂向载荷,Cα是侧偏刚度,α是侧偏角,μ是轮胎附着系数。
2.3 后轴轮胎力建模
漂移时,整个后轮轮胎接地面处于完全滑动的状态。假设各向同性摩擦系数,侧向力和纵向力受摩擦圆关系约束:

文献[3] [4]控制算法设计时通过摩擦圆建立期望的后轴侧向力Fyf与后轴纵向力Fxr映射关系,直接将后轴纵向力作为系统输入并乘以轮胎半径得到后轴转矩需求。
该方法忽略了车轮动力学,但当考虑更复杂轨迹工况时车轮动力学是相当重要的;Fxr不是真正的输入,而是轮胎与路面滑移的结果。对于完全饱和的轮胎,力和滑移的关系可以以一种既简单又有物理意义的方法进行建模:力大小为μFz,其方向与滑移速度矢量Vslip方向相反。定义这个方向为推力角γ,如图3所示,改变Rω矢量的长度可以直接改变γ。几何关系为:

其中R是轮胎半径,ω是轮速,Vtravelx和Vtravely分别是车辆在轮胎处速度的纵向和侧向分量。
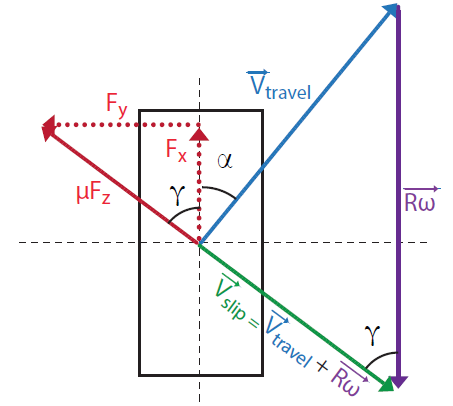
图3 滑移轮胎的速度和力矢量
值得注意的是在完全饱和状态下,这个关系同刷子轮胎模型[7]和简化魔术公式轮胎模型[1]表达是一致的。系统的控制输入,在车轮动力学ω中表达为:

其中Iω是车轮-轮胎-传动系统的转动惯量,τ为实际转矩。
3控制器设计
3.1概述
控制器的任务是利用转向角和后轴驱动力矩跟踪给定路径和期望质心侧偏角。因此选择了侧向位移误差e和质心侧偏角β作为控制变量。
控制器的总体结构如图4所示,在第一部分,基于e和β的期望稳定动力学,得到期望的航向角速度 和综合横摆角速度rsyn,对rsyn闭环得到期望的横摆角加速度
和综合横摆角速度rsyn,对rsyn闭环得到期望的横摆角加速度 。
。
第二部分,通过非线性车辆动力学模型反演将 和
和 转化为转向角δ和期望的推力角γdes。然后将推力角映射到期望的轮速ωdes。最终,对ωdes闭环得到驱动力矩τ。
转化为转向角δ和期望的推力角γdes。然后将推力角映射到期望的轮速ωdes。最终,对ωdes闭环得到驱动力矩τ。

图4控制器架构框图
3.2 误差动力学
3.2.1 路径跟踪
航向角速度 直接用于跟踪路径。侧向位移误差e的期望二阶动力学方程为:
直接用于跟踪路径。侧向位移误差e的期望二阶动力学方程为:
 得到期望的
得到期望的 :
:

3.2.2 镇定质心侧偏角
然后,与 相关的车辆横摆角速度,用于镇定质心侧偏角。质心侧偏角跟踪误差
相关的车辆横摆角速度,用于镇定质心侧偏角。质心侧偏角跟踪误差 的期望一阶动力学方程:
的期望一阶动力学方程:

与文献[3] [4]中方法类似,基于综合输入横摆角速度rsyn计算得到期望的 ,这些方法进行了
,这些方法进行了 的稳态近似,然后,由于对航向角速度
的稳态近似,然后,由于对航向角速度 有明确的控制,使用期望的航向角速度
有明确的控制,使用期望的航向角速度 替代。
替代。

对横摆角速度跟踪误差 的一阶求导,得到期望的横摆角加速度
的一阶求导,得到期望的横摆角加速度 。
。

其中 是综合横摆角速度的微分,可以近似表达为:
是综合横摆角速度的微分,可以近似表达为:

其中 是参考轨迹的横摆角加速度。
是参考轨迹的横摆角加速度。
3.3 非线性模型反演
通过公式(5)中非线性单轨车辆模型反演,将期望 变换为转向角和后轴纵向力/推力角。
变换为转向角和后轴纵向力/推力角。
图5中是一组比较有代表性的状态微分间曲面关系。投影到 平面(图6),可以看到曲面发生折叠即部分区域对于给定组合有两个解。这样把曲面分成较大的“上”表面和较小的“下”表面;分界线如图5、6、7中红线所示。
平面(图6),可以看到曲面发生折叠即部分区域对于给定组合有两个解。这样把曲面分成较大的“上”表面和较小的“下”表面;分界线如图5、6、7中红线所示。
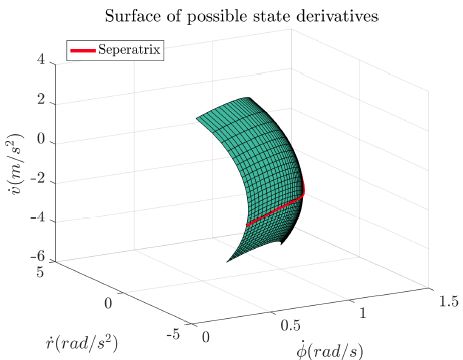
图5横摆角速度为53.9°/s,车速为9.35m/s,质心侧偏角为-40°时车辆状态微分间三维图

图6沿车速微分等高线的横摆角加速度vs航向角速度

图7沿横摆角加速度等高线的航向角速度vs车速微分
通常来讲,仅有小部分 空间是位于下表面的,因此模型反演可以在上表面约束下得到1对1的映射关系,并以简单的方式确保执行器指令的连续性。另外值得注意的是,上表面通常包括状态组合
空间是位于下表面的,因此模型反演可以在上表面约束下得到1对1的映射关系,并以简单的方式确保执行器指令的连续性。另外值得注意的是,上表面通常包括状态组合 ,如图7所示,在跟踪准平衡轨迹时能实现此状态微分空间。
,如图7所示,在跟踪准平衡轨迹时能实现此状态微分空间。
需求的 有可能落到可行域外。对控制器中初始时刻和试验中产生的这种情况进行简单处理。
有可能落到可行域外。对控制器中初始时刻和试验中产生的这种情况进行简单处理。 的值受到
的值受到 可行域的饱和约束,然后计算
可行域的饱和约束,然后计算 。得到的
。得到的 沿
沿 线投影到可行域内。所提出策略中不稳定的横摆/侧偏动力学控制优先级高于侧向位移误差控制。
线投影到可行域内。所提出策略中不稳定的横摆/侧偏动力学控制优先级高于侧向位移误差控制。
3.4 轮速控制
根据非线性模型反演得到的后轴纵向力/推力角,进而根据公式(8)中的力-滑移关系得到期望轮速。基于简化的动态面控制[3]跟踪期望轮速ωdes。

其中 是期望轮速在时间常数为
是期望轮速在时间常数为 的一阶滤波后得到的,利用期望后轴纵向力
的一阶滤波后得到的,利用期望后轴纵向力 计算前馈力矩。
计算前馈力矩。
因为MARTY测试车辆后轮独立可控且机械上解耦,分别对左右后轮进行控制。令左后轮和右后轮的推力角分别为 ,得到期望的左右轮和右后轮轮速
,得到期望的左右轮和右后轮轮速 和
和 ,其中d为车辆轮距,单轮的期望纵向力基于稳态载荷转移的假设得到:
,其中d为车辆轮距,单轮的期望纵向力基于稳态载荷转移的假设得到:

其中 为发生在后轴的载荷转移的经验值,h为质心高度。
为发生在后轴的载荷转移的经验值,h为质心高度。
4试验验证
在曲率在1/7到1/20间变化和速度在25km/h到45km/h间变化的复杂轨迹以及-40°的参考质心侧偏角下试验验证了算法的有效性。
4.1测试方法
试验在如图1所示的试验平台MARTY上进行。MARTY由1981 DMC Delorean改装而来,配备有线控转向和可独立驱动左右后轮的电驱动系统。车辆状态信息通过集成的RTK-GPS/IMU得到,更新频率为250Hz。在上位机实时运行的控制算法的运算频率也为250Hz。
在参考轨迹的起始点和末端分别增加简单的进入和退出回旋线,用于文献[5]相似的基础路径跟踪控制器使得车辆跟踪此路径。漂移控制器在s=57m时介入,在s=463m时退出。控制器参数和车辆参数如表1所示。

表1控制器参数和车辆参数
4.2轨迹规划
参考文献[5]方法,轨迹是由不稳定漂移平衡点序列构成的。首先,选取期望曲率 和质心侧偏角
和质心侧偏角 ,其是关于路径距离s的函数。对于参考轨迹中每个点,将
,其是关于路径距离s的函数。对于参考轨迹中每个点,将 和
和 代入运动方程求解得到参考轨迹
代入运动方程求解得到参考轨迹 值,参考质心侧偏角
值,参考质心侧偏角 近似表示为
近似表示为 。
。
选取的配置文件曲率从1/7到1/20m间变化,参考质心侧偏角为-40°,得到平衡速度在25km/h到45km/h之间的轨迹。
图8轨迹曲率与参考质心侧偏角配置
4.3试验结果
控制算法较好地跟踪了参考轨迹,表现出良好的侧向位移误差和质心侧偏角跟踪效果。
如图9所示,车辆的实际路径与参考路径十分接近,图10给出了侧向位移误差与路径距离的关系:其均方根误差为0.18m,最大偏差为-0.36m。
车辆处于期望质心侧偏角-40°附近状态时,达到了上述良好路径跟踪性能。图11给出了测量的车辆状态,可以看出质心侧偏角跟踪效果较好:均方根误差为2.4°,最大偏差仅为-6.1°。闭环下速度也与轨迹参考速度十分接近,既说明了车速稳定又说明了用于规划的模型比较准确。除了在漂移起始时刻,测量的横摆角速度也可以很好地跟踪参考横摆角速度。
最后值得注意的是,因为在较大的状态范围内进行非线性模型反演,会产生较大范围的输入-最明显的例子是控制算法在图6测试时达到了65°。
图9试验中测量路径vs参考路径
图10试验中路径跟踪性能
图11试验中车辆状态vs路径距离
图12试验中转向角和推力角输入
5结论
本文设计了针对复杂轨迹的自动驾驶漂移控制器。控制器由车辆状态微分推导得到,并且没有涉及到特定的车辆模型。航向角速度用于跟踪曲线坐标系下的侧向位移误差,然后控制相对于航向角速度的横摆角速度从而控制质心侧偏角。
为了得到车辆状态微分到执行器输入的映射关系,进行非线性模型反演和简单的轮速闭环控制。试验验证了在曲率在1/7到1/20间变化和速度在25km/h到45km/h间变化的复杂轨迹以及-40°的参考质心侧偏角工况下的有效性。
对复杂轨迹下漂移平衡点的路径跟踪和质心侧偏角镇定研究,保证了自动驾驶车辆在需要的情况下能够在开环稳定极限外操纵。未来的研究将进一步考虑在未进行准平衡假设下实现轨迹规划和跟踪,解决车辆状态快速变化的问题。
-
控制器
+关注
关注
112文章
15191浏览量
171087 -
自动驾驶
+关注
关注
773文章
13014浏览量
163180
原文标题:复杂轨迹工况下的自动漂移控制
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论