 小米米家扫地机器人拆解 做工如何
小米米家扫地机器人拆解 做工如何
8月底,小米在北京召开发布会,正式发布了生态链品牌米家旗下的新品:米家扫地机器人,售价1699元。
米家扫地机器人采用了十分简洁的外观设计,尤其是透明灰尘盖可以一目了然地看到内部情况。
同时,机身外壳还配备雷了达罩、出音孔、出风孔和充电连接点,适合各种居家环境。
接下来我们就拆开这台机器人,看看它的内部构造。
米家扫地机器人9.6cm厚度、纯白机身、模块化设计、全密封尘盒、人性化防毛发设计,IMR工艺的上盖,更具质感透亮。
机器人上盖开启状态。
每个功能按键都有完善的中文注解,非常体贴。
尘盒具备尘盒检测传感器,机器人开机后取出和归位尘盒的时候都有语音提示。
尘盒进口是梯形出口是矩形,出口的E11等级滤网可以阻隔非常细小的灰尘颗粒。
尘盒开启状态。
滤网可以取出方便更换,E11等级滤网特写。
机器人底部,采用的是单侧边刷。
按箭头方向按动卡扣可取下主刷上盖。
V字型胶毛一体化主刷。
万向轮与两个悬崖传感器,万向轮同样具有毛发防缠绕功能。
悬崖传感器,机器人底部一共有4个悬崖传感器。可有效杜绝机器人跌落损坏。
左右两只轮子,每个轮子都是独立电机驱动并且安装有里程计,用来计算工作室的行走里程。
轮子采用浮动式设计。
LDS激光测距传感器,会以5x360。/秒的速度扫描房间,获取距离信息。当激光投射到障碍物上时,会反射在图像传感器上。同时,图像传感器会根据光斑的像素序号来计算到激光测距传感器的中心距离。
此外激光测距传感器通过扫描并定位充电座,识别它在地图上的位置。当房间全部清扫完成,会自动规划最短路线返回充电座充电。
在清扫途中,如果电量低于20%,能自动返回充电座充电,当电量充至80%后机器人还会回到上次未清扫完成地点继续清扫,免去重复清扫的尴尬。
超声传感器,整颗传感器由负责发射超声和负责接收超声两部分组成,声波在空气中传播的速度是340M/s,根据发射和接收的时间差可以计算并得到机器人与障碍物距离,从而避免碰撞,透明物体(例如玻璃)也能正确感应提前减速。
机身上的充电触点。
位于机器人侧面的沿墙传感器。
机器人的边刷,仔细看中央半球形底部边缘的黑色小刷头为边刷防缠绕结构,又称“毛发隔离束”,它可以随边刷进行同步转动,一方面防止毛发进入间隙,另一方面便于收集毛发。
机器人尾部一个非常隐蔽的部位预留了一个MicroUSB接口,功能未知。
机器人底部相关信息贴纸。
拧开6枚螺丝(其中一枚螺丝上有防拆易碎贴纸),移除机器人底盖。
底盖上的螺丝是防脱落设计,很贴心。
LG/松下原装进口高能量密度18650锂离子电芯,容量为5200mAh,标准模式下单次最大续航时间约2.5小时最大清扫面积约250平米。
具有独立电机驱动的左右两只轮子,轮子总成一体化模块设计,拧下螺丝轻轻一拔即可将轮子总成完整取出。
左右两只轮子与喇叭吸尘口。喇叭吸尘口采用了柔性吸尘软管系统,它与尘盒的连接处采用FIP密封方式,浮动灵活密封严密。
移除几个模块机器人还有一层盖板,这一层盖板螺丝非常多,但好在只有两种规格的螺丝而且不易混淆。
经过漫长的拧螺丝,终于去下盖板,露出机器人的核心电路板。
电路板上密密麻麻布满了大大小小各种IC元件,复杂度异常!
另一侧是风机和各个模块部分连接插座。
各个模块部分连接插座。
充电触点这里没什么机关,就是简单的正负极连接线。
沿墙传感器与悬崖传感器。
碰撞传感器的出发开关。
超声雷达传感器,整颗传感器由负责发射超声和负责接收超声两部分组成。
拆掉螺丝和排线取下电机。
米家扫地机器人采用日本原装进口NIDEC无刷电机,能达到最大风量0.67m3/min,最大风压约为1800Pa。
出风口使用防尘过滤棉。
风机出风口采用软橡胶材质。
NIDEC无刷电机LOGO。
常见的涡轮风扇。
众多的排线,大部分连接的都是各种传感器。
机器人的扬声器部分。
接下来拆除LDS激光测距传感器。
LDS激光测距传感器由一个电机通过皮带驱动。通过快速旋转以5?60?/秒的速度扫描房间,获取距离信息。
拆开LDS激光测距传感器。里面有主控电路、激光发射管与接收传感器组成。
TI德州仪器TMS320F28026DAS微控制器(MCU)。
在激光测距模块下方还有一个光电传感器,孔里看到的是发射端。
接收端在底部的PCB上。
LDS激光测距传感器电路板反正面。
供电电路部分。
超声雷达传感器。
超声雷达传感器的电路部分。
PCB上方的是东芝TC74HC4049A反相缓冲器。
SGM722970µA 10MHz Rail-to-RailI/OC MOS Operational Amplifier运算放大器,TI德州仪器HC0263A。
来自夏普的沿墙传感器。
碰撞传感器与悬崖传感器。
悬崖传感器由一个红外发射管和红外接收管组成。
拆开的碰撞传感器,原理很简单通过杠杆原理导通和关闭光信号来识别是否撞击到障碍物。
电路板的背面和正面相比空旷许多。
Allwinner ARM Cortex-A7架构的四核应用处理器。
黄框美光MT41K256M16TW-107 DDR3LSDRAM,橙框AXP223电源系统管理芯片,红框东芝THGBMDG5D1LBAIL 4GB se-MMC,绿框RTL8189ETV无线模块。
ST意法半导体ARM Cortex-M3架构的微控制器。
TI德州仪器BQ24773充电管理IC。
SGM8594精密运算放大器。
SGM8748 155ns Low-Power 3V/5V Rail-to-Rail Input Single-Supply Comparator。
RT2515H2A Low Input Voltage Ultra-Low Dropout LDO Regulator with Enable线性稳压IC。
SGM48780D4Ω High Speed Low Voltage 4:1 Multiplexer。
红框SGM8594精密运算放大器,橙框SGM8622250µA 3MHz Rail-to-RailI/O CMOS Operational Amplifier运算放大器。
开关微动按键与其蓝白双色LED背景灯。
拆开电池组外壳,电池保护板镍带的焊接元件焊点与排线焊点的处理都非常到位,保护板具有:过充保护、过放保护、温度保护、短路保护、过流保护、二次过压。
从缝隙可以看出来我手中这款采用的是LG的18650锂离子电池。
米家的设备确实为生活增添了智能和方便快捷元素。
全家福。
-
小米
+关注
关注
68文章
14126浏览量
141726 -
扫地机器人
+关注
关注
20文章
741浏览量
52158
发布评论请先 登录
相关推荐
视觉、激光、结构光?扫地机器人导航避障技术盘点

扫地机器人的工作原理和应用芯片

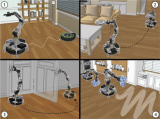
扫地机器人加装了六轴机械臂!

关于扫地机器人的测试方法

输入扫地机器人专用芯片模块电机供电驱动
智能扫地机器人是如何准确清扫全屋的?
扫地机器人停滞不前的原因是什么
我们拆了一款Tof+AI避障的扫地机
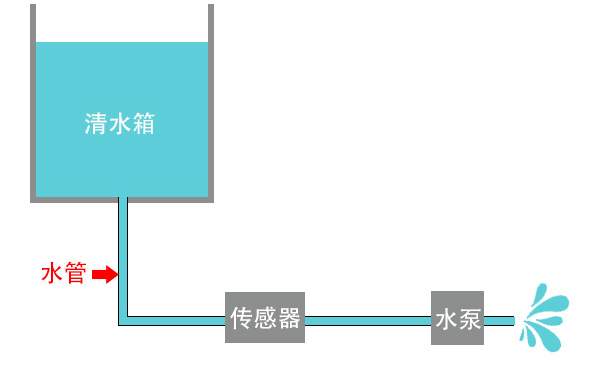
扫地机器人液位检测方案





 工商网监
工商网监
评论