 基于ACP的智能车辆网联管理与控制
基于ACP的智能车辆网联管理与控制
智能交通系统(Intelligent transportation systems, ITS)[1]是将先进的人工智能技术、信息处理技术、数据通讯传输技术、电子传感技术、电子控制技术及计算机处理技术等有效地集成运用于整个地面交通管理系统而建立的一种全方位、全天候、实时、准确、高效的综合交通运输管理系统.ITS能有效地利用现有交通设施、减少交通负荷和环境污染、保证交通安全、提高运输效率、促进社会经济发展、提高人民生活质量,并因推动社会信息化及新产业形成而受到各国的重视.
车联网是物联网技术在智能交通中的应用[2].近年来,随着车辆智能化与无人驾驶技术的发展,车辆对于周围环境的感知能力、车载终端的计算与规划能力显著增强,信息在车与车、车与人、车与路之间共享和传输的实现,为智能交通的全面管理与控制提供了新的科学思路与技术手段[3].然而,车联网系统涉及到动态交通场景中人-车-路的信息传输、交互、重组、后台数据分析、决策支持等多个过程.一方面,驾驶员心理与行为的高突变性、不确定性、动态性为人与车、车与车、车与外部环境的交互引入了新的复杂因素;另一方面,车内网、车际网与车载移动网络的合成不可避免地引入了社会信号[4],使车联网成为一个典型的社会物理信息系统(Cyber-physical-social systems, CPSS)[5-6].不同于传统的物理信息系统(Cyber-physical systems, CPS), CPSS将人及其心理和组织的因素纳入系统之中,极大地提高了系统的建模复杂性,成为约束车联网智能化水平的一大瓶颈.
复杂系统管理与控制国家重点实验室王飞跃研究员2004年提出的“平行系统方法与复杂系统的管理和控制”[7]一文为应对复杂系统难以建模与实验不足等问题提出了新的研究思路:集人工系统(Artificial systems, A)、计算实验(Computational experiments, C)、平行执行(Parallel execution, P)为一体的ACP平行智能方法体系.它通过数据驱动的描述智能、实验驱动的预测智能、虚实互动反馈的引导智能,为不定、多样和复杂问题(Uncertainty, diversity, complexity, UDC)提供灵捷、聚焦和收敛(Agility, focus, convergence, AFC)的解决方案,为解决复杂CPSS系统的建模、计算、评估与管理提供有效途径.近年来,基于ACP的平行智能方法不断在实践中得以完善,逐渐发展出了平行视觉[8]、平行感知[9]、平行数据[10]、平行情报[11-12]、平行学习[13]的理论与对应方法,在交通[14-17]、物流[18-19]、农业[20]、能源[21]、医疗健康[22-24]、机器人[25]、区块链[26-27]、无人驾驶[28-29]等领域得到了广泛应用,并取得了显著的效果.
为此,本文尝试将平行智能这一本世纪初提出的原创性研究范式引入车联网领域,以有效解决时变、异质、复杂交通环境下车联网的建模、规划与决策、优化管理等问题.本文结构安排如下,首先详解平行智能的概念、框架、哲学基础与科学思维;随后着重介绍了平行智能在平行交通领域的探索与实践;在此基础上,将平行智能的架构与体系与车联网深度融合,提出平行车联网的概念体系,阐述基于ACP方法的平行车联网的框架、功能与流程;最后对本文工作进行总结,展望未来趋势.
1 平行智能:框架、哲学基础、科学思维
平行智能是在本世纪初提出的原创性研究范式.它主要面向由泛在的移动智能设备以及社会信号促成的“人在环路”、兼具高度社会和工程复杂性的CPSS系统,通过数据驱动的描述智能、实验驱动的预测智能、虚实互动反馈的引导智能,为不定、多样和复杂问题提供灵捷、聚焦和收敛的解决方案[30-31].
ACP方法是实现平行智能的有效途径[32-33].通过构建软件定义的人工系统(A),对系统中的每个元素构建人工对象、人工流程、人工关系,开放了复杂系统的组合、编程、学习与演化能力,使得系统的资源甚至结构重构成为可能;以实际系统运行产生的数据为人工系统的输入,以游戏或博弈的方式进行计算实验(C),从“小数据”生成“大数据”,而后对计算实验的运行结果进行评估,得到特定场景下的最优或最可行方案;平行执行(P)则将计算实验获取的方案“投入”人工系统中,并通过预训练以及模型调参的方式引导实际逼近人工,让“大数据”聚焦,成为针对具体问题的“小知识”,最终通过人工与实际系统的虚实交互与闭环反馈实现决策寻优与平行调谐. ACP方法体系如图1所示.

图1基于ACP的平行智能架构体系
1.1 CPSS的哲学基础:波普尔的三个世界
CPSS的科学哲学起源可追溯到波普尔在其1972年出版的《客观知识》一书中提出的“三个世界”的理论[34],即世界由三部分组成:第1部分的物理世界、第2部分的心理世界和第3部分的人工世界.对此,中科院自动化研究所王飞跃研究员认为[35],经过几千年的发展,农业和工业社会已全面地开发了人类的物理自然世界和精神心理世界,保障了人类的生存和发展;物联网、大数据、云计算等概念的兴起以及人工智能、机器人、无人驾驶等技术的再次风靡,预示人工世界将成为人类现阶段开发的重点,其核心任务就是深度开发数据和智力资源.为此,我们必须认识到,以人为本、面向物理世界和网络空间融合的CPSS而非传统的信息物理系统(CPS)将成为未来社会的基础设施.
CPSS区别于CPS的核心要素可用“建模鸿沟”[36]来表示.在CPSS中,由于“人”与机器、流程、系统的深度耦合,并且人的行为具有动态性、实时性、自组织性、突变性、高度复杂性、虚实交互性等特点,系统表现出更强的UDC特征.简言之,人类行为的加入导致了系统复杂程度的增加,使其逐渐地从简单的物理系统向大型的信息系统发展,再向包含社会因素的复杂社会系统过渡,所涉及的关键信息也从物理信号,到网络信号,再到社会信号演变;针对系统的行为的建模方法也从解析式的数学模型到仿真模型,再到描述型的人工模型升级;实际行为与模型行为之间的差别也越来越大,以至形成“建模鸿沟”的客观现象,如图2所示.随着复杂性的提高,目标与现实的差距“鸿沟”越来越难以跨越,因此,要求我们从利用可以控制系统行为的“牛顿定律”进行建模,转向通过能够影响系统行为的“默顿定律”进行描述,实现从传统的“牛顿系统”思维到“默顿系统”思维的转变.
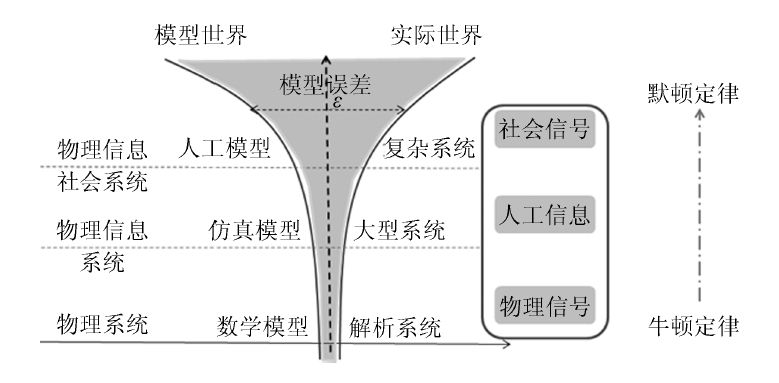
图2复杂系统的建模鸿沟
1.2 平行智能的科学思维:从牛顿到默顿
我们称能够由“牛顿定律”控制的系统为“牛顿系统”[35]. “牛顿定律”泛指包括经典牛顿定律在内的可通过解析的方式精确地描述系统行为的科学定律和公式.现代工程控制理论与方法,便主要是应用于此类“牛顿系统”,即:给定当前系统状态与控制的条件,理论上系统下一步的状态可通过求解方程准确获得,从而精确预测系统的行为.牛顿系统建模的核心是寻求控制系统行为的“牛顿定律”,据此直接设计相应的控制方法,实现期望的目标.
对应的,系统行为能够被“默顿定律”影响或引导的系统我们称为“默顿系统”. “默顿定律”泛指以社会学家默顿命名的各种能够引导系统行为的“自我实现预言”[36-37].与牛顿系统不同的是,即使给定其当前状态与控制条件,理论上系统下一步的状态也无法通过求解而准确地获得,系统的行为也难以被精确地预测,只可能被“人为”的假设或可能性描述.默顿系统建模的核心变为根据目标去设计能够有效地影响或指导系统行为的“默顿定律”,在此基础上建立围绕目标实现这一任务的人工系统,从而直接或间接地影响“自由意志”,改变行为模式,进而通过实际系统与人工系统的平行互动,促使实际系统运行在期望的目标之下.
对于牛顿系统, “行为建模”与“目标建模”是一致的:只要系统本身可控,可以通过对“行为模型”的分析达到对其控制的目的,无需单独对目标进行建模.与牛顿系统不同,默顿系统的“行为建模”与“目标建模”是独立且不一致的,必须单独对目标进行描述和建模,以便决定如何围绕预定目标对系统的情景和行为进行引导、分析、预判、归类、实验、评估等.
CPSS是一类典型的默顿系统[38-39],面向CPSS的平行智能体系架构如图3所示.由于系统本身带有社会空间引入的、包含人类“自由意志”的不确定性,系统“行为模型”的准确性和有效性高度依赖于系统参与人员之行为的可控性和确定性,导致本质上无法对其“行为模型”进行直接控制,只能间接影响.集人工社会、计算实验、平行执行为一体的ACP平行智能方法为解决此类复杂系统问题提供了有效手段:以真实数据为驱动,通过自底向上的多智能体方法对复杂系统描述、建模,构造与实际系统平行演化的人工系统;以人工系统为“社会实验室”,对复杂场景计算、评估、训练,借助人工系统的计算实验使复杂问题参数化、简单化、确定化;最终人工系统与实际系统密切相连、虚实互动,形成实时自适应调节的平行系统.最终实现数据驱动的描述智能、实验驱动的预测智能、虚实互动反馈的引导智能;为不定、多样和复杂的默顿系统问题提供灵捷、聚焦和收敛的解决方案.
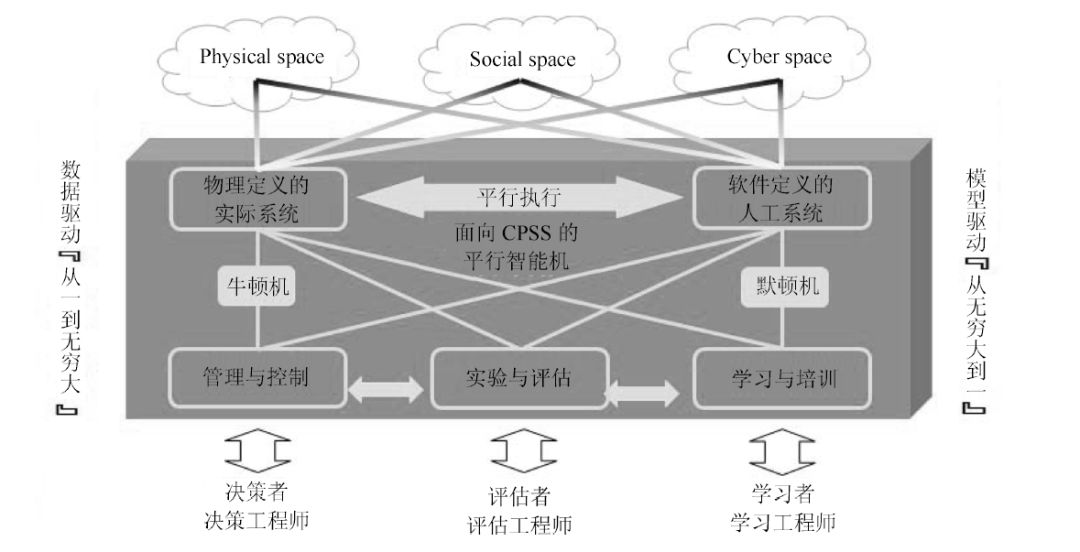
图3面向CPSS的平行智能体系架构
2 平行交通:基于ACP的智能交通管理与控制
ACP平行智能方法最早被应用于智能交通领域,近年来在城市区域交通、轨道交通、物流交通等诸多领域也得到了广泛应用并取得了良好的社会与经济效应[14-17,30-32].本质上,交通系统中的驾驶员与车、路以及交通信息网是一个密不可分的整体,必须使用CPSS复杂系统的观念来看待.本节首先介绍平行交通的已有工作基础,在此基础上,将平行智能方法引入车联网的研究中,由此提出平行车联网的体系架构.
交通系统是一个典型的CPSS[40]:作为一个开放的复杂系统,交通系统包含了人与社会动态变化性和不可预测性,且物理过程与社会过程交叉参半,许多现象均是涌现而来,兼具典型复杂系统之不确定性、动态时变性及互作用性等众多特征[41].一直以来,交通系统的管理与控制主要面临两大问题:一是传统交通的数据存在很高的壁垒,交通数据难以大规模体系化获取;二是传统方法几乎都是使用已存在的交通数据进行推理、决策,由结果去探索原因,无法全面复盘问题本质,难以从根本上解决交通问题.
基于ACP方法的平行交通系统使用人工交通系统(Artificial transportation systems, ATS)建模构造交通的“社会实验室”;借助计算实验C对各种各样的交通行为和现象进行“试验”,作为实际交通情况的参考基础,并探索系统中的因果逻辑及异常情况;通过平行执行P对计算结果加入分析和利用,以实现“虚实”互动的平行管理与控制,为解决上述两个提问提供了有效方法.
在平行交通理论体系的基础上,中国科学院自动化研究所团队在2010年自主研发了平行交通系统PtMS[15],系统组成如图4所示. PtMS由实际交通系统和人工交通系统共同组成,包括基于代理进行平行管理与控制的aDAPTS,进行交通试验分析的DynaCAS,针对学习与培训的OTSt;系统具体涵盖交通视频采集与分析系统RoadScope,网络化交通信号控制器GreenPass,人工交通系统TransWorld,云计算平台,交通信息发布平台五大模块.平行交通原型系统的设计、开发与研究利用多学科、跨领域、综合性的复杂系统方法研究交通系统,开辟了智能交通研究的新思路,并在江苏太仓[15]、广州亚运会[42]以及山东青岛[43]等地得到了应用实践,取得了良好的运行效果.
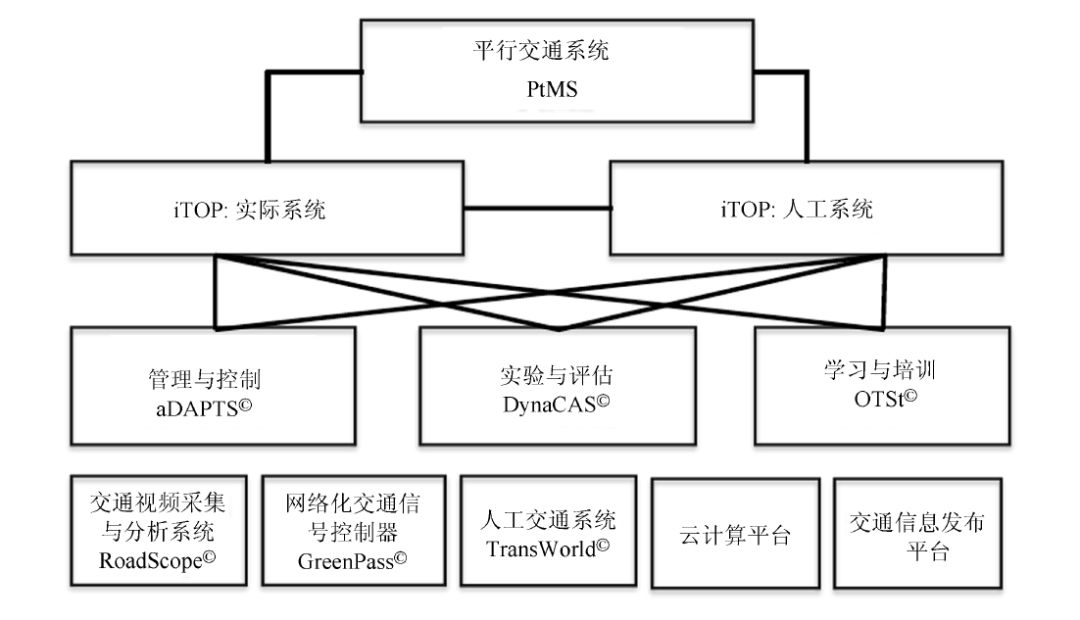
图4平行交通系统PtMS组成
近年来,随着计算机、数据通信、智能传感等技术的发展以及移动智能终端的泛在使用,大数据、云计算、物联网、社会网络以及人工智能等技术进一步被集成在交通运输、服务推荐、车辆管理等整个地面交通管理系统中.这一方面加强了驾驶员、车辆、道路以及交通服务提供商之间的联系,使得一种全方位发挥作用、移动指挥与管理、多交通信息系统深度融合的“多位一体”综合交通运输管理系统[43]正在形成;另一方面,社会网络以及人工智能技术的发展进一步促进了个人信息终端与车载终端的深度融合,人类行为的复杂性、突变性、高度动态性、自组织性等特征通过车辆在交通系统中被延伸甚至放大.这即要求,智能交通系统不仅需要对人-车对象进行组织与管理,还需要将人-车对象作为一个整体考虑其与路边单元以开放社会环境的协同.车联网作为一种协同多人、多车、多路边单元与开放环境的可计算、可控、可管理、可引导、可信的开放融合网络系统,为未来综合交通系统的智能管理与控制提供了新的思路与途径.
3 平行车联网:概念、框架、功能与流程
平行车联网的基本思路是将基于ACP平行智能方法引入车联网系统,在物理和网络空间数据的驱动下,结合无线通信、多智能体建模、计算机图形学、虚拟现实、机器学习、社会网络分析等技术,借助软件定义的对象(Software-defined objects, SDO)、软件定义的关系(Software-defined relationships, SDR)、软件定义的流程(Software-defined processes, SDP)等,针对物理空间中的车-人(V2P)、车-车(V2V)、车-基础设施(V2I)等对象及其双向通信构建与之对偶、互逆、平行的人工过程,而后利用人工系统、计算实验与平行执行的范式来建立虚实交互、协同演化、闭环反馈的平行车联网,实现交通系统智能管理、社会信息动态服务和车辆智能控制的一体化网络.本节首先对已有的车联网相关工作进行介绍,在此基础之上提出平行车联网的概念与基本框架,并阐释其系统功能与运作流程.
3.1车联网基本概念与架构
车联网是物联网在交通领域中的具体实现,具有明显的物联网属性,是一种典型的复杂网络系统[2].其体系架构与物联网有许多共同之处,目前文献中大多将车联网分为车载端、通信层、云管层等3层架构:车载端同时负责感知收集信息以及提供应用服务;通信层传输信息;云管层依据业务及场景需求进行数据分析、计算与建模,为车载端应用服务提供后台支撑.层层相连,每一层为其上层提供信息与决策支持,如图5所示.

图5车联网基本架构体系
感知及服务层一方面通过射频识别RFID (Radio frequency identification)、GPS (Global positioning system)、车载雷达、摄像头、车载娱乐设施等传感器采集车辆、道路、环境以及驾驶员信息,另一方面也通过各类车载传感器为驾驶员提供娱乐、行车安全以及交通环境监测识别等服务,是智能驾驶决策、智能交通管控、车载信息服务等车联网服务的基础.通信层利用网络传输与数据通信技术,实现车辆联网;同时根据网络负载状况和接入资源限制,建立稳定、安全、高质量的信息传送通道.常见通信形式包括:车与人(V2I)、车与车(V2V)、车与路边基础设施(V2I)、车与移动基站、车与数据中心的通信.云管层以“车端简单、云端复杂”的方式,融合物联网、互联网、社会网、智联网的传输数据,利用边缘计算、云计算、社会计算以及普适计算等技术,从全网范围内对资源需求进行解析、计算并调配,实现对特定场景、任务、服务的精准认知,以达到有效减少交通拥堵、提高出行效率、绿色出行的目的.
很明显,车联网是一个典型的“人在环内”的CPSS系统.其中每一个行人、车辆、路侧设施、移动基站都可以抽象为车联网中的节点,通过社会网、互联网、物联网等的连接,互动连接构成社群,为车联网服务提供支持.作为一个特殊的复杂网络,车联网系统元素的多样性、时变性、分布式的结构及参与个体行为的不确定性、复杂性、多样性,导致其内在的动力学机制极为难以理解.同时,智能驾驶技术所促成的“人车共驾”形态将会是未来较长时间内的一种典型现象,这不仅需要考虑驾驶员行为高突变性、不确定性、动态性等复杂因素以及意图、习惯难以理解等问题;与此同时,车内网、车际网与车载移动网络的耦合所引入的众多社会信号(Social signal)也为复杂交通的管理带来了新的挑战.
3.2平行车联网框架、功能与流程
基于ACP的平行混合智能管理与控制研究方法,本文引入复杂网络分析的方法对车联网进行解析,综合考虑信息、心理、仿真、决策的多元融合,以可计算、可实现、可比较的方式对复杂车联网系统不同层次的结构和功能特性进行解析,为研究复杂系统的控制与管理提供了新思路及方法.它以CPSS复杂系统为对象,将理论研究、实验方法和计算技术三种科学手段相结合,提高了对复杂系统要素相互作用的动态演化规律的认识分析能力,增强了复杂系统对象应对各种变化和非正常状态的管控能力,为复杂系统的管理与控制提供了一个有效的创新技术手段.
融合人工车联网、计算实验、平行执行三大部分的基于社会物理信息系统(CPSS)的平行车联网框架如图6所示.
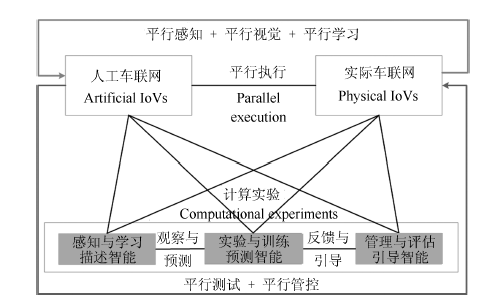
图6平行车联网基本框架
本文提出的平行车联网架构是ACP方法在车联网领域的推广,目标是理解车联网不同层次的结构和功能特性以及内在动力学特性,为混合交通形态下的系统管理提供科学的解决方案.总体上,平行车联网的ACP由“三步曲”组成.
3.2.1 第一步:人工车联网, “生长型”系统模型构建与培育
人工车联网本质是利用人工社会[44]的理论与方法,借助知识表示(Knowledge representation)与知识工程(Knowledge engineering)等手段,针对车联网包含的各类元素及问题,构建可计算、可重构、可编程的软件定义的对象(Software-defined objects, SDO)、软件定义的流程(Software-defined processes, SDP)、软件定义的场景(Software-defined scenes, SDS),进而通过对象的流程组合等方式搭建、培育“软件定义的车联网”,通过对成千上万的交通场景进行集成,使之成为智能交通“计算实验室”,进行车联网复杂问题和决策的计算实验,一个人工车联网系统至少包括如图7所示部分.

图7人工车联网子系统组成
采用自底向上的多智能体方法对系统建模,系统中至少有八类智能体对象:人工人、人工车、人工道路、人工路边单元、人工基站、人工建筑;每类智能体具有简单的计算与交互能力.同时将天气和时间因素分别表示为一类特殊智能体,考虑时间与光照、雨、雪、风、雾等天气情况的组合情况,通过定义智能体之间的交互规则、组织规则与协同行为规则,构建适用于不同真实交通场景及其规范下的人工车联网子系统,如图7所示.
已有一些工作通过构建数字化的虚拟人工车辆、人工人口、人工场景等对复杂交通系统的动力学机制进行分析与实验.王飞跃等早在2003年[45]即提出在智能交通系统中嵌入数字汽车/公路技术,通过向司机提醒潜在驾驶威胁以提高行驶安全,引导安全驾驶行为;随后在2004年[46]提出了人工交通系统(Artificial transportation systems, ATS)的基本思想与框架体系以及针对复杂交通系统管理与控制的ACP方法[33].朱凤华等[47]将整个交通系统看作是一个时序通信系统,采用Petri网的方法对ATS中的交互与流程进行建模,以模拟复杂交通系统中的交互行为,为物理交通系统的管控提供科学计算的策略支持.缪青海等设计了一种基于对等计算的ATS[48],借助JXTA体系构架,利用P2P通讯机制构建ATS,并通过仿真实例验证了该方法的可行性,为数字化智能交通计算实验室的构建提供了方法基础. Li等对ATS的生长模型进行了探索,引入多智能体建模方法,设计了一种基于规则迭代演化的ATS[49]. Qu等[50]提出智能交通空间的概念,明确了交通系统的CPSS特性,并强调需要全面考虑行人、车辆、路边单元、移动基站、卫星等交通因素的交互,构建与真实物理空间相对应的虚拟智能交通空间,进而借助虚拟空间中的策略计算、试验与评估,发现适用于物理空间交通系统的管控策略. Miao等[51]设计了一种面向Agent的模块化分布式仿真平台,以进行人工交通系统的建模和计算.通过将人工人口设计为游戏中的角色,利用Delta3D游戏引擎和Delta3D的动态角色层机制构建3D仿真环境以及管理所有移动角色(包括车辆、行人等). Sewall等在文献[52]中基于离散时空数据来重建和可视化连续交通流,使用户能够在虚拟世界中观看虚拟化交通事件.该方法能够重建交通流,实现虚拟城市的沉浸式可视化.这些工作虽然不是直接围绕车联网研究展开,但对人工车联网的构建颇具启发意义.
相对于实际车联网系统,人工车联网中的车辆行为的产生、交互和演化过程是完备的,它一方面极大地弥补了实际车联网数据(特别是极端环境数据与异常情景数据)的不足;另一方面借助统计机器学习、数据挖掘、深度学习等方法对实际车联网数据的参数学习确定人工车联网系统的初始状态参数,同时结合规则学习方法自动提取智能体的行为规则,进而利用自底向上的多智能体方法对人工车联网中的对象及其之间的相互作用进行建模.这样利用大型计算机和多智能体技术“培育生长”起来的人工车联网系统,能够模拟并“实播”实际交通系统的各种静态和动态特征,例如通过驾驶员Agent与车辆Agent的交互,来模拟学习驾驶员的行为特征;通过车辆Agent与路段Agent的交互,实现交通环境感知等等.这种通过大型人工场景的设计来“形象”且“参数化”地解释“源起于微观的复杂宏观现象”,可以更好地解释复杂车联网系统不同层次的结构、功能及其动力学特性,如图8所示.

图8基于多智能体建模的人-车-路互动示意图
3.2.2第二步:计算实验,智能车辆网联管理与控制策略的试验与评估
计算实验的主要目的是借助人工车联网这个数字化的“计算实验室”,设计各类智能体的数量组合策略及时序互动规则,生成各类复杂交通场景,以计算的手段让车辆通过做实验的方式在其中运行、学习,并对其学习到的“经验知识”的适用情况进行逆向分析与评估,使人工车辆在虚拟交通实验室的人工场景中“跑”出真正适用于不同真实交通场景的驾驶策略.图9阐释了“计算实验室”中的实验设计方式.

图9“计算实验室”中实验设计示意
该环节的主要步骤包括:借助数据挖掘、机器学习与统计分析等技术,对运行于物理世界中的车联网进行特征与规则提取,构建真实车联网数据支持中心;随后利用提取的人-车、车-车、车-路边单元的运营及交互规则对人工车联网及其场景进行构建,首先实现对真实车联网运行情况的模拟;在此基础之上,可围绕特定的场景与目标进行实验设计,从而对特定的管理与控制策略进行测试与评估,若某一策略满足预定义的目标,则可投放于物理车联网中,引导其运营.其实验架构如图10所示.通过构建这样一种基于复杂自适应系统的动态网络分配方法来设计、执行、评估并验证车联网计算实验,来学习已有的以及预测可能会出现的交通模式,可以在棘手的交通模式出现之前,通过交通信息的分发与社会引导,进行有效预防.
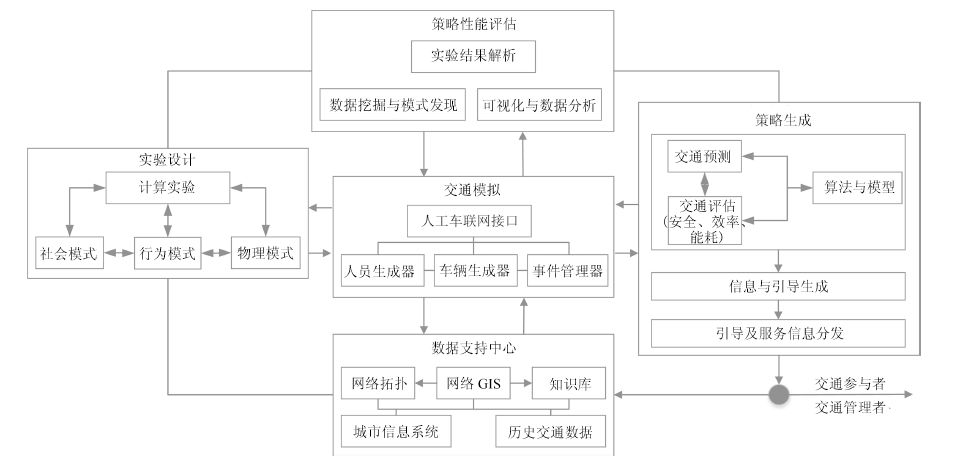
图10基于复杂自适应系统的动态网络分配方法的计算实验
在图10所示的计算实验体系中,主要有两种操作模式:学习与训练、实验与评估.目前已有许多工作围绕智能驾驶的虚拟学习、训练、测试、评估等工作展开,通过使车辆在集成了大量人工场景的虚拟交通环境中“驾驶”,在车辆上路前赋予其感知复杂环境并认知复杂场景的能力,为平行车联网的计算实验工作提供了许多可借鉴的方法.早在2003年,王飞跃等[53]即提出“数字试车场(Digital-vehicle proving ground, DVPG)”的概念,指出DVPG能够以主动交互或被动接受的方式产生测试任务,并至少满足两种类型的服务:标准测试以及特定测试,对无人驾驶车辆进行训练与评估.清华大学李力等于2016年6月发表于IEEE Transactions on Intelligent Vehicles上的文章[54]通过集成基于场景的测试(Scenario-based tests)与基于功能的测试(Functionality-based tests)方法,提出了一种虚实一体的智能测试新框架;随后在此基础上发展出一种“平行学习”[55]新手段,通过使用状态迁移来刻画系统变化,使车辆从虚拟交通场景中学习获取驾驶经验,甚至识别特定的“交通/驾驶模式”,一旦感知到某些“局部特征”,即可预测整体的交通情况或驾驶状态,从而预调整自身的驾驶决策与路径规划. Alphabet旗下谷歌无人驾驶子公司Waymo的Carcraft与Carcastle项目,通过构建虚拟城市与虚拟空间为智能车辆提供驾驶学习环境,使得车辆“不是‘像’在外面的真实世界中进行驾驶决策,而就‘是’在外面的真实世界中决策”[56].中国科学院自动化研究所王坤峰等[57]近来也提出一种使用“虚拟图像”来训练并测试检测物体的方法,一方面弥补了真实数据集的不足,另一方面为检测视觉识别算法提供了新的数据,可帮助算法更好地学习与演化,与Waymo的方法异曲同工;该团队还建立了开源的平行视觉研究平台(http://openpv.cn),以促进平行视觉的研究[58].来自卡内基梅隆大学、Petuum公司的Yang等学者则提出了一种“现实域到虚拟域统一的无监督方法”[59],使用条件生成对抗网络来将真实域中的驾驶图像变换到虚拟领域中的规范表示,并从中预测车辆控制命令以提高车辆指令预测任务的性能.
计算实验是平行智能非常重要的一个环节.在复杂实际车联网中,我们难以获得车联网中各对象状态、组织行为、演化过程的完备数据,但人工车联网能够模拟整个车联网系统,在“学习与训练”模式下,自动习得或生成精确的标注信息,使得原本因需要付出巨大经济代价或系统太过复杂而无法进行的实验通过计算的手段得以顺利进行.同时,通过计算实验,我们就能面向具体应用,如特定交通场景、特定驾驶功能、特定交通任务,从全局优化的角度对人工车联网进行专项训练;同时在“实验与评估”操作模式下,利用人工车联网的运行结果,全面评价其在复杂情况下的表现性能以及危险程度.
3.2.3第三步:平行执行,车联网的智能引导管理与控制
平行车联网综合考虑车内网、车际网、车路网以及社会网的平行,如图11所示.通过构建与物理空间车联网相对应的虚拟人工车联网,借助计算实验的手段,即可设计面向复杂交通系统的可重复、可配置、可计算、可引导的车联网管理与控制实验,有效评测、预估并引导实际车联网运营状态.此时,计算实验的结果不再仅仅是对实际运行情况的“仿真”,而是成为了系统运行状态的一种可能结果[60].一方面,实际车联网向平行车联网提供真实数据信息,提供建立、调整及优化人工车联网模型的状态参数;计算实验利用输入的真实数据进行模型训练,生成大量“人工数据”,在真实“小数据”与人工“大数据”组成的“混合海量数据”中进行大量的学习,提高并优化系统的场景学习与情景认知能力;另一方面,通过虚拟现实平行执行的方式,人工车联网中的计算实验结果将被反馈给实际车联网,进行实时且在线的借鉴、预估与引导,循环往复,协同优化.

图11平行车联网架构
平行车辆作为CPSS空间中联通基础设施网络与人类社会网络的人车协同个体,是解决车联网中人-车协同以及单车与车群协同问题的关键[61-62].人车协同单元通过车内的人-车交互手段,实现协同感知、规划与决策;通过车际网提供的车-环境直接交互和车载移动互联网提供的间接交互,实现车联网环境元素之间的信息感知控制与反馈;通过社会网提供的生活服务交互,保障社会需求与关系在车联网中的延伸与实现.同时,人工车辆在虚拟交通空间中可以不受物理空间位置的限制、能源的限制、数据通信瓶颈的约束,与其他人工车辆进行交互,以众包的方式完成路网环境数据采集、协同路径规划、复杂场景感知与情景认知等任务.
在平行车联网中,虚拟车辆通过平行感知、平行学习、平行驾驶、平行规划与平行测试的方法保障人工车联网与实际车联网的实时信息交互、策略反馈及双向优化,提升智能网联汽车在感知、决策与规划和控制等关键领域的性能表现,实现对不同层次需求、不同服务内涵的整体网络资源及交通资源的优化管理与配置,从而更好地满足不断提高的车联网系统的控制与管理需求,为涵盖不同自动化层级的智能网联汽车系统和未来智能交通提供一套智能融合解决方案及框架[63-64].
近年来出现的AlphaGo可被视为平行学习、平行评估与平行决策的最佳示例. AlphaGo以人类棋手真实历史棋局的“小数据”为输入,通过“左右互搏”式的计算实验来进行自博弈、自适应和自演化,生成大量的由真实棋局和虚拟棋局组成的“混合大数据”;再通过算法对棋盘局势(潜在结果)进行评估,得出落子的价值及其行为策略的效率等“小知识”,并通过与人类棋手的不断对弈实现平行进化.人工车辆与实际车辆也遵循这一过程(如图12所示),通过虚实互动、平行执行,为实现高效、在线、实时的双向反馈机制以及对实际车联网的监控预警与反馈支持提供了保障.
图12平行车辆的虚实互动、平行执行
4 总结与展望
本文从CPSS的角度对车联网进行系统化分析,将平行智能理论与ACP方法推广应用于车联网领域,提出了一种新型的平行车联网架构,并对其构建方法进行了深入探讨.平行车联网综合数据挖掘、机器学习、人工智能、虚拟现实、知识自动化等技术,综合考虑信息、心理、仿真、决策的多元融合,以可计算、可实现、可比较的方式对复杂车联网系统不同层次的结构和功能特性进行解析,为未来交通的智能管理与控制提供了新思路及方法.
然而,车联网是一种涉及到多方个体行为的复杂系统,引导策略最终是否生效与驾驶员、管理员是否完全按方案执行有很大关系.在实际车联网中,用户由于主观或者客观因素,并非一定会完全按照车联网的优化方案执行,如何计算并根据社会可接受度(Social acceptance)来灵活调整和分配可用资源、发布引导信息将是平行车辆网需要解决的最具挑战且重要的问题之一.
现阶段,平行驾驶、平行学习与平行测试的研究已经引起了国际同行的高度重视,随着相关技术的进一步发展,平行车联网作为一个集成验证平台,必将成为未来智能交通系统研究的一个重要方向.结合不断发展的无人驾驶技术与日益丰富的业务需求,平行车联网将会有更为广阔的研究空间与更具潜力的应用前景.
参考文献
1Lu Hua-Pu, Sun Zhi-Yuan, Qu Wen-Cong. Big data and its applications in urban intelligent transportation system. Journal of Transportation Systems Engineering and Information Technology, 2015, 15(5): 45-52.
(陆化普,孙智源,屈闻聪.大数据及其在城市智能交通系统中的应用综述.交通运输系统工程与信息, 2015, 15(5): 45-52. DOI:10.3969/j.issn.1009-6744.2015.05.007)
2 Li Jing-Lin, Yuan Quan, Yang Fang-Chun. Crowd sensing and service in internet of vehicles. ZTE Technology Journal, 2015, 21(6): 6-9.
(李静林,袁泉,杨放春.车联网群智感知与服务.中兴通讯技术, 2015, 21(6): 6-9. DOI:10.3969/j.issn.1009-6868.2015.06.002)
3 Han S S, Wang F Y, Wang Y C, Cao D P, Li L. Parallel vehicles based on the ACP theory: safe trips via self-driving. In: Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (Ⅳ). Los Angeles, CA, USA: IEEE, 2017. 20-25
4 Wang Fei-Yue. A framework for social signal processing and analysis: from social sensing networks to computational dialectical analytics. Scientia Sinica: Informations, 2013, 43(12): 1598-1611.
(王飞跃.社会信号处理与分析的基本框架:从社会传感网络到计算辩证解析方法.中国科学:信息科学, 2013, 43(12): 1598-1611.)
5 Wang F Y. The emergence of intelligent enterprises: from CPS to CPSS. IEEE Intelligent Systems, 2010, 25(4): 85-88. DOI:10.1109/MIS.2010.104
6 Zeng J, Yang L T, Lin M, Ning H S, Ma J H. A survey: cyber-physical-social systems and their system-level design methodology. Future Generation Computer Systems. DOI:10.1016/j.future.2016.06.034
7 Wang Fei-Yue. Parallel system methods for management and control of complex systems. Control and Decision, 2004, 19(5): 485-489.
(王飞跃.平行系统方法与复杂系统的管理和控制.控制与决策, 2004, 19(5): 485-489. DOI:10.3321/j.issn:1001-0920.2004.05.002)
8 Wang Kun-Feng, Gou Chao, Wang Fei-Yue. Parallel vision: an ACP-based approach to intelligent vision computing. Acta Automatica Sinica, 2016, 42(10): 1490-1500.
(王坤峰,苟超,王飞跃.平行视觉:基于ACP的智能视觉计算方法.自动化学报, 2016, 42(10): 1490-1500.)
9 Meng Xiang-Bing, Wang Rong, Zhang Mei, Wang Fei-Yue. Parallel perception: an ACP-based approach to visual SLAM. Journal of Command and Control, 2017, 3(4): 350-358.
(孟祥冰,王蓉,张梅,王飞跃.平行感知: ACP理论在视觉SLAM技术中的应用.指挥与控制学报, 2017, 3(4): 350-358. DOI:10.3969/j.issn.2096-0204.2017.04.0350)
10 Liu Xin, Wang Xiao, Zhang Wei-Shan, Wang Jian-Ji, Wang Fei-Yue. Parallel data: from big data to data intelligence. Pattern Recognition and Artificial Intelligence, 2017, 30(8): 673-681.
(刘昕,王晓,张卫山,汪建基,王飞跃.平行数据:从大数据到数据智能.模式识别与人工智能, 2017, 30(8): 673-681.)
11 Wang Fei-Yue. H.S.Tsien's concept for intelligence and parallel intelligence: from LASER to inspiritment. Acta Automatica Sinica, 2015, 41(6): 1053-1061.
(王飞跃.从激光到激活:钱学森的情报理念与平行情报体系.自动化学报, 2015, 41(6): 1053-1061.)
12 Wang Fei-Yue. Intelligence 5.0: parallel intelligence in parallel age. Journal of Information, 2015, 34(6): 563-574.
(王飞跃.情报5.0:平行时代的平行情报体系.情报学报, 2015, 34(6): 563-574. DOI:10.3772/j.issn.1000-0135.2015.006.001)
13 Li Li, Lin Yi-Lun, Cao Dong-Pu, Zheng Nan-Ning, Wang Fei-Yue. Parallel learning: a new framework for machine learning. Acta Automatica Sinica, 2017, 43(1): 1-8.
(李力,林懿伦,曹东璞,郑南宁,王飞跃.平行学习-机器学习的一个新型理论框架.自动化学报, 2017, 43(1): 1-8. DOI:10.3969/j.issn.1003-8930.2017.01.001)
14 Liu Teng, Yu Hui-Long, Tian Bin, Ai Yun-Feng, Chen Long. Intelligent Command and Control Systems for Intelligent Vehicles: Primary Methods and Systemic Construction. Journal of Command and Control, 2018, 4(1): 22-31.
(刘腾,于会龙,田滨,艾云峰,陈龙.智能车的智能指挥与控制:基本方法与系统结构.指挥与控制学报, 2018, 4(1): 22-31. DOI:10.3969/j.issn.2096-0204.2018.01.0022)
15 Wang F Y. Parallel control and management for intelligent transportation systems: concepts, architectures, and applications. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3): 630-638. DOI:10.1109/TITS.2010.2060218
16 Lv Yi-Sheng, Ou Yan, Tang Shu-Ming, Zhu Feng-Hua, Zhao Hong-Xia. Computational experiments of evaluating road network traffic conditions based on artificial transportation systems. Journal of Jilin University: Engineering and Technology Edition, 2009, 39(S2): 87-90.
(吕宜生,欧彦,汤淑明,朱凤华,赵红霞.基于人工交通系统的路网交通运行状况评估的计算实验.吉林大学学报(工学版), 2009, 39(S2): 87-90.)
17 Ning Bing, Wang Fei-Yue, Dong Hai-Rong, Li Run-Mei, Wen Ding, Li Li. Parallel systems for urban rail transportation based on ACP approach. Journal of Transportation Systems Engineering and Information Technology, 2010, 10(6): 22-28.
(宁滨,王飞跃,董海荣,李润梅,文丁,李莉.基于ACP方法的城市轨道交通平行系统体系研究.交通运输系统工程与信息, 2010, 10(6): 22-28. DOI:10.3969/j.issn.1009-6744.2010.06.003)
18 Wang Fei-Yue, Dai Ru-Wei, Zhang Si-Ying, Chen Guo-Liang, Tang Shu-Ming, Yang Dong-Yuan, et al. A complex system approach for studying sustainable and integrated development of metropolitan transportation, logistics and ecosystems. Complex Systems and Complexity Science, 2004, 1(2): 60-69.
(王飞跃,戴汝为,张嗣瀛,陈国良,汤淑明,杨东援,等.关于城市交通、物流、生态综合发展的复杂系统研究方法.复杂系统与复杂性科学, 2004, 1(2): 60-69. DOI:10.3969/j.issn.1672-3813.2004.02.009)
19 Shen D Y, Wang X, Wang J, Guan X Y, Yang P H, Xu L. Parallel intermodal road-rail transportation system based on ACP approach. In: Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC). Banff, Canada: IEEE, 2017. 444-449 https://www.researchgate.net/publication/321411352_Parallel_intermodal_road-rail_transportation_system_based_on_acp_approach
20 Kang M Z, Wang F Y. From parallel plants to smart plants: intelligent control and management for plant growth. IEEE/CAA Journal of Automatica Sinica, 2017, 4(2): 161-166. DOI:10.1109/JAS.2017.7510487
21 Deng Jian-Ling, Wang Fei-Yue, Chen Yao-Bin, Zhao Xiang-Yang. From industries 4.0 to energy 5.0: concept and framework of intelligent energy systems. Acta Automatica Sinica, 2015, 41(12): 2003-2016.
(邓建玲,王飞跃,陈耀斌,赵向阳.从工业4.0到能源5.0:智能能源系统的概念、内涵及体系框架.自动化学报, 2015, 41(12): 2003-2016.)
22 Wang F Y, Wong P K. Intelligent systems and technology for integrative and predictive medicine: an ACP approach. ACM Transactions on Intelligent Systems and Technology, 2013, 4(2).
23 Wang Fei-Yue, Zhang Mei, Meng Xiang-Bing, Wang Rong, Wang Xiao, Zhang Zhi-Cheng, et al. Parallel surgery: an ACP-based approach for intelligent operations. Pattern Recognition and Artificial Intelligence, 2017, 30(11): 961-970.
(王飞跃,张梅,孟祥冰,王蓉,王晓,张志成,等.平行手术:基于ACP的智能手术计算方法.模式识别与人工智能, 2017, 30(11): 961-970.)
24 Wang Fei-Yue, Li Chang-Gui, Guo Yuan-Yuan, Wang Jing, Wang Xiao, Qiu Tian-Yu, et al. Parallel gout: an ACP-based system framework for gout diagnosis and treatment. Pattern Recognition and Artificial Intelligence, 2017, 30(12): 1057-1068.
(王飞跃,李长贵,国元元,王静,王晓,邱天雨,等.平行高特:基于ACP的平行痛风诊疗系统框架.模式识别与人工智能, 2017, 30(12): 1057-1068.)
25 Bai Tian-Xiang, Wang Shuai, Shen Zhen, Cao Dong-Pu, Zheng Nan-Ning, Wang Fei-Yue. Parallel robotics and parallel unmanned systems: framework, structure, process, platform and applications. Acta Automatica Sinica, 2017, 43(2): 161-175.
(白天翔,王帅,沈震,曹东璞,郑南宁,王飞跃.平行机器人与平行无人系统:框架、结构、过程、平台及其应用.自动化学报, 2017, 43(2): 161-175.)
26 Yuan Yong, Wang Fei-Yue. Parallel Blockchain: concept, methods and issues. Acta Automatica Sinica, 2017, 43(10): 1703-1712.
(袁勇,王飞跃.平行区块链:概念、方法与内涵解析.自动化学报, 2017, 43(10): 1703-1712.)
27 Yuan Yong, Wang Fei-Yue. Blockchain: the state of the art and future trends. Acta Automatica Sinica, 2016, 42(4): 481-494.
(袁勇,王飞跃.区块链技术发展现状与展望.自动化学报, 2016, 42(4): 481-494.)
28 Wang F Y. Scanning the issue and beyond: parallel driving with software vehicular robots for safety and smartness. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(4): 1381-1387. DOI:10.1109/TITS.2014.2342451
29 Wang F Y, Zheng N N, Cao D P, Martinez C M, Li L, Liu T. Parallel driving in CPSS: a unified approach for transport automation and vehicle intelligence. IEEE/CAA Journal of Automatica Sinica, 2017, 4(4): 577-587. DOI:10.1109/JAS.2017.7510598
30 Wang Fei-Yue. Computational theory and method on complex system. China Basic Science, 2004, 6(5): 3-10.
(王飞跃.关于复杂系统研究的计算理论与方法.中国基础科学, 2004, 6(5): 3-10. DOI:10.3969/j.issn.1009-2412.2004.05.001)
31 Wang Fei-Yue. On the modeling, analysis, control and management of complex systems. Complex Systems and Complexity Science, 2006, 3(2): 26-34.
(王飞跃.关于复杂系统的建模、分析、控制和管理.复杂系统与复杂性科学, 2006, 3(2): 26-34. DOI:10.3969/j.issn.1672-3813.2006.02.004)
32 Wang F Y, Zhang J J, Wang X. Parallel intelligence: toward lifelong and eternal developmental AI and learning in cyber-physical-social spaces. Frontiers of Computer Science, 2018, 1-5.
33 Wang F Y. Toward a paradigm shift in social computing: the ACP approach. IEEE Intelligent Systems, 2007, 22(5): 65-67. DOI:10.1109/MIS.2007.4338496
34 Wang Fei-Yue. From AlphaGo to parallel intelligence: enlightenment and prospect. Science and Technology Review, 2016, 34(7): 72-74.
(王飞跃.从AlphaGo到平行智能:启示与展望.科技导报, 2016, 34(7): 72-74. DOI:10.3969/j.issn.1009-6108.2016.07.033)
35Wang Fei-Yue. System engineering and management reform: sublimation from Newton to Merton. Management, 2013(10): 12-19.
(王飞跃.系统工程与管理变革:从牛顿到默顿的升华.管理学家, 2013(10): 12-19. DOI:10.3969/j.issn.1674-1722.2013.10.012)
36 Wang F Y, Wang X, Li L X, Li L. Steps toward parallel intelligence. IEEE/CAA Journal of Automatica Sinica, 2016, 3(4): 345-348. DOI:10.1109/JAS.2016.7510067
37 Wang F Y. A big-data perspective on AI: Newton, Merton, and analytics intelligence. IEEE Intelligent Systems, 2012, 27(5): 2-4. DOI:10.1109/MIS.2012.91
38 Wang F Y. Scanning the issue and beyond: Merton's laws and Mertionian systems for ITS. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(6): 2962-2969. DOI:10.1109/TITS.2015.2494998
39 Wang Fei-Yue. Software-defined systems and knowledge automation: a parallel paradigm shift from Newton to Merton. Acta Automatica Sinica, 2015, 41(1): 1-8.
(王飞跃.软件定义的系统与知识自动化:从牛顿到默顿的平行升华.自动化学报, 2015, 41(1): 1-8. DOI:10.3969/j.issn.1003-8930.2015.01.001)
40 Xiong G, Zhu F H, Liu X W, Dong X S, Huang W L, Chen S H, et al. Cyber-physical-social system in intelligent transportation. IEEE/CAA Journal of Automatica Sinica, 2015, 2(3): 320-333. DOI:10.1109/JAS.2015.7152667
41 Xing Y, Lv C, Chen L, et al. Advances in vision-based lane detection: algorithms, integration, assessment, and perspectives on ACP-based parallel vision. IEEE/CAA Journal of Automatica Sinica, 2018, 5(3): 645-661. DOI:10.1109/JAS.2018.7511063
42 Xiong G, Wang K F, Zhu F H, Cheng C, An X J, Xie Z D. Parallel traffic management for the 2010 Asian Games. IEEE Intelligent Systems, 2010, 25(3): 81-85. DOI:10.1109/MIS.2010.87
43 Wang F Y. Scanning the issue and beyond: five transportations in one: a new direction for ITS from Qingdao. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(5): 2310-2317. DOI:10.1109/TITS.2015.2478319
44 Gilbert N, Conte R. Artificial Societies: The Computer Simulation of Social Life. London: UCL Press, 1995.
45 Wang F Y, Lai G P, Mirchandani P. Deployment of digital vehicle/highway technology for safety enhancement. In: Proceedings of the IEEE Ⅳ2003 Intelligent Vehicles Symposium. Columbus, OH, USA: IEEE, 2003. 204-207
46 Wang Fei-Yue, Tang Shu-Ming. Concepts and frameworks of artificial transportation systems. Complex Systems and Complexity Science, 2004, 1(2): 52-59.
(王飞跃,汤淑明.人工交通系统的基本思想与框架体系.复杂系统与复杂性科学, 2004, 1(2): 52-59. DOI:10.3969/j.issn.1672-3813.2004.02.008)
47 Zhu F H, Wang Z X, Wang F Y, Tang S M. Modeling interactions in artificial transportation systems using petri net. In: Proceedings of the 2006 IEEE Intelligent Transportation Systems Conference. Toronto, Ont., Canada: IEEE, 2006. 1131-1136
48 Miao Qing-Hai, Tang Shu-Ming, Wang Fei-Yue. Design of artificial transportation system based on JXTA. Journal of Transportation Systems Engineering and Information Technology, 2006, 6(6): 83-90.
(缪青海,汤淑明,王飞跃.基于对等计算的人工交通系统设计.交通运输系统工程与信息, 2006, 6(6): 83-90. DOI:10.3969/j.issn.1009-6744.2006.06.012)
49 Li J Y, Tang S M, Wang X Q, Duan W, Wang F Y. Growing artificial transportation systems: a rule-based iterative design process. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(2): 322-332. DOI:10.1109/TITS.2011.2110646
50 Qu F Z, Wang F Y, Yang L Q. Intelligent transportation spaces: vehicles, traffic, communications, and beyond. IEEE Communications Magazine, 2010, 48(11): 136-142. DOI:10.1109/MCOM.2010.5621980
51 Miao Q H, Zhu F H, Lv Y S, Cheng C J, Chen C, Qiu X G. A game-engine-based platform for modeling and computing artificial transportation systems. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(2): 343-353. DOI:10.1109/TITS.2010.2103400
52 Sewall J, van den Berg J, Lin M, Manocha D. Virtualized traffic: reconstructing traffic flows from discrete spatiotemporal data. IEEE Transactions on Visualization and Computer Graphics, 2011, 17(1): 26-37. DOI:10.1109/TVCG.2010.27
53 Wang F Y, Wang X J, Li L, Mirchandani P. Creating a digital-vehicle proving ground. IEEE Intelligent Systems, 2003, 18(2): 12-15.
54 Li L, Huang W L, Liu Y H, Zheng N N, Wang F Y. Intelligence testing for autonomous vehicles: a new approach. IEEE Transactions on Intelligent Vehicles, 2016, 1(2): 158-166. DOI:10.1109/TIV.2016.2608003
55 Li L, Lin Y L, Zheng N N, Wang F Y. Parallel learning: a perspective and a framework. IEEE/CAA Journal of Automatica Sinica, 2017, 4(3): 389-395. DOI:10.1109/JAS.2017.7510493
56 Waymo's fully self-driving vehicles are here[Online], available: https://medium.com/waymo/with-waymo-in-the-drivers-seat-fully-self-driving-vehicles-can-transform-the-way-we-get-around-75e9622e829a
57 Tian Y L, Li X, Wang K F, Wang F Y. Training and testing object detectors with virtual images. IEEE/CAA Journal of Automatica Sinica, 2018, 5(2): 539-546. DOI:10.1109/JAS.2017.7510841
58 Wang K F, Gou C, Zheng N N, Rehg J M, Wang F Y. Parallel vision for perception and understanding of complex scenes:methods, framework, and perspectives. Artificial Intelligence Review, 2017, 48(3): 299-329. DOI:10.1007/s10462-017-9569-z
59 Yang L N, Liang X D, Xing E. Unsupervised real-to-virtual domain unification for end-to-end highway driving. arXiv: 1801. 03458, 2018.
60 Wang Fei-Yue. Parallel control: a method for data-driven and computational control. Acta Automatica Sinica, 2013, 39(4): 293-302.
(王飞跃.平行控制:数据驱动的计算控制方法.自动化学报, 2013, 39(4): 293-302.)
61 Li Ke-Qiang, Dai Yi-Fan, Li Sheng-Bo, Bian Ming-Yuan. State-of-the-art and technical trends of intelligent and connected vehicles. Journal of Automotive Safety and Energy, 2017, 8(1): 1-14.
(***,戴一凡,李升波,边明远.智能网联汽车(ICV)技术的发展现状及趋势.汽车安全与节能学报, 2017, 8(1): 1-14. DOI:10.3969/j.issn.1674-8484.2017.01.001)
62 Xu W, Zhou H, Cheng N, et al. Internet of vehicles in big data era. IEEE/CAA Journal of Automatica Sinica, 2018, 5(1): 19-35. DOI:10.1109/JAS.2017.7510736
63 Han S S, Zhu F H, Wang Y C, Cao D P, Xiong G, Wang F Y. Modified K-best receiver for multi-antenna vehicular networks. In: Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC). Yokohama, Japan: IEEE, 2017. 1-6
64Wang Fei-Yue, Wang Cheng-Hong. On some basic issues in network-based direct control systems. Acta Automatica Sinica, 2002, 28: 171-176.
(王飞跃,王成红.基于网络控制的若干基本问题的思考和分析.自动化学报, 2002, 28(S1): 171-176.)
-
车联网
+关注
关注
76文章
2479浏览量
91163 -
ACP
+关注
关注
0文章
5浏览量
7799
原文标题:平行车联网: 基于ACP的智能车辆网联管理与控制
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
cascade探针acp65探针参数
智能车控制器功能有哪些
智能网联汽车虚拟仿真测试平台

智能车控制器功能介绍

翠展微电子荣获“第八届清华校友三创大赛新能源智能网联汽车专题赛”三等奖

双舵机模糊控制在智能车控制中的应用介绍
芯驰科技与上汽大众成立联合创新中心 携手突破智能网联汽车新技术
全球首个面向网联智能车的通信与多模态感知数据集发布
智能网联汽车电子电气架构产业技术路线图
解决方案 | 车辆控制单元赋能未来出行






 工商网监
工商网监
评论