 极限工况下的无人驾驶路径跟踪
极限工况下的无人驾驶路径跟踪
据报道,近日,斯坦福大学的工程师们在加州著名的雷山赛道公园完成了经改良的奥迪 TTS 无人驾驶,圈速甚至超过了有人驾驶车辆。这辆改良过的赛车奥迪 TTS 名为「雪莱」。斯坦福大学的教授已经从事无人车辆的线控底盘控制许多年了,希望能够实现无人驾驶的高速行驶以及提高无人驾驶的安全性。
对轮胎附着能力的利用程度对紧急工况或者竞速中的车辆而言是至关重要的,当转向不足车辆在极限过弯的时候发生前轴饱和,转向系统已经失去了路径跟踪的能力。无人驾驶车辆的试验数据表明,在附着极限下通过转向操作进行路径跟踪,要求附着系数的误差在大约 2% 以内。这完全超过了现有的实时路面附着系数估计算法的能力。收集的专业赛车驾驶员的驾驶数据,得出新颖的控制框架,基于侧偏角的控制策略——保持前轮处于最大轮胎附着利用率的侧偏角,以及相应路径跟踪的纵向车速控制方法。这个方法最大的好处是大大降低了对于附着系数估计精度的依赖。本研究基于这一概念设计了控制器,试验结果表明在附着系数未知的前提下,车辆在附着极限下也能够成功跟踪圆周路径。
1 前言
扩大车辆的行驶极限需要尽可能地利用轮胎的附着能力。相应地,这也能够提高车辆避障的能力、防止车辆偏离道路、降低碰撞的损伤,甚至提高车辆比赛的圈速成绩。随着线控底盘技术的发展,即使在轮胎附着极限的情况下,ADAS 和智能驾驶系统也有可能通过连续的控制来提高车辆的安全性。
Kritayakirana 为路径跟踪而设计的速度跟踪和独立转向控制系统证明了智能汽车在附着极限下的控制可行性[1]。Beal 和 Gerdes 利用 MPC 算法设计了智能车辆在极限工况下的侧向动力学控制系统[2]。这两套控制系统都要求对路面附着系数进行估计,并且在试验中都运用了离线的估计结果。而实际使用过程中需要将附着系数替换成在线的估计结果。
Hsu 在单纯转向工况中利用转向力矩来试试估计路面附着系数[3]。Hahn 同样利用车辆侧向动力学设计了车辆参数实时辨识算法来估计路面附着系数和轮胎的侧偏刚度[4]。Ray 利用侧向和纵向动力学设计了一个基于贝叶斯假设的测试框架,从统计数据上看,观测器能够很好地估计不同的附着程度假设的轮胎力[5]- [9]。
在极限行驶工况下,转向控制已经不是路径跟踪的有效控制输入了,因为此时再增大转角也已经无法增加行驶的曲率——曲率的上限取决于车速。因此,极限工况下路径跟踪的典型转角控制需要准确估计给定曲率和地形的路径下允许的最大车速。这意味着需要准确估计路面的附着系数。本文中试验数据表明这样的控制器需要路面附着系数的估计误差在大约 2% 以内才能达到与专业赛车驾驶员在极限行驶过程中同等的行驶性能。而这要求超出了现有的实时估计算法的能力范畴。
在紧接着的赛道测试中,一名专业驾驶员表明,他的圈速比智能驾驶控制系统的更快,主要是因为他能够更好地利用轮胎附着能力。记录的数据催生出一个针对不足转向车辆转向过程的基于轮胎侧偏角的转角控制方法,目的是让前轮保持在最大轮胎力对应的侧偏角上。另外,相比于转角控制,大家公认的是速度反馈也能够用于路径跟踪。这会是一个全新的控制架构,能够让智能汽车在跟踪目标路径的同时尽可能地利用轮胎的附着能力。对轮胎模型的分析可知,对路面附着系数的实时估计精度要求远低于利用转角控制实现路径跟踪的估计精度要求。
为了验证这一控制逻辑,一个新的纵向速度控制器被设计出来跟踪一个圆周路径,另外由 Subosits 和 Gerdes 设计的一个基于车轮侧偏角的转向控制器被用来控制前轮在给定滑移率下保持最大轮胎力对应的侧偏角[10]。纵向速度控制器和侧偏角控制器都需要估计路面附着系数,因此根据 Ray 的假设测试算法建立了基于侧向动力学路面附着系数的在线估计器[5]- [9]。
第二部分介绍了该研究用到的车辆和车辆建模。而在第三部分,赛道的收集数据表明,对于一个基于转角控制的智能驾驶路径跟踪器,路面附着系数的估计误差要求在大约 2% 以内。同时,专业赛车驾驶员的行驶数据中迸发出一个新的方法来更有效利用车轮的附着能力。第四部分介绍了一个类似的智能驾驶控制器。第五部分的试验结果表明在附着情况未知的情况下,本文提出的控制架构和在线附着估计器能够在极限工况下成功地跟踪给定的圆周路径。
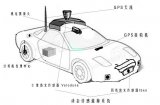
图 1无人驾驶 Audi TTS Quattro 研究车辆
图 2平面车辆单轨模型和路径跟踪状态
2 试验车辆与车辆模型
A.试验车辆介绍
一辆 2009 年 Audi TTS Quattro 试验车辆,如图1 所示,装备了一个主动液压主缸、DSG 变速箱、EPS、电子节气门和整车 CAN 网络。无人驾驶控制器运行以 200Hz 的频率运行中 dSPACE 公司的 MicroAutoBoxII 上面,一台 OxTS RT4003 惯性导航仪和差分 GPS 被安装在测试车辆上,用于测量车辆和路径跟踪的状态。转角控制器由 Kapania 和 Gerdes 设计完成[11]。本文的数据是在美国加州威洛斯的雷山赛道公园采集的。
B.车辆动力学建模
一个平面单轨车辆模型,如图2 所示,为数据分析和控制器设计提供了一个简单而直观的车辆模型。在这个模型中,同一轴上的两个车轮被近似为一个集中车轮,从而模拟稳态的侧向载荷转移等影响因素。该模型有三个速度状态:纵向速度 Ux、侧向速度 Uy 和横摆角速度 r。除了车辆的速度状态外,图2 还描绘了车辆质心出的合速度 V、质心侧偏角 β 和转向角 δ。另外,为了表示车辆和路径的关系,沿着路径的距离 s 和侧向位移误差 e 也被标出。车辆航向 ψ 和路径的航向 ψr 之间的偏差用来 △ψ 表示。
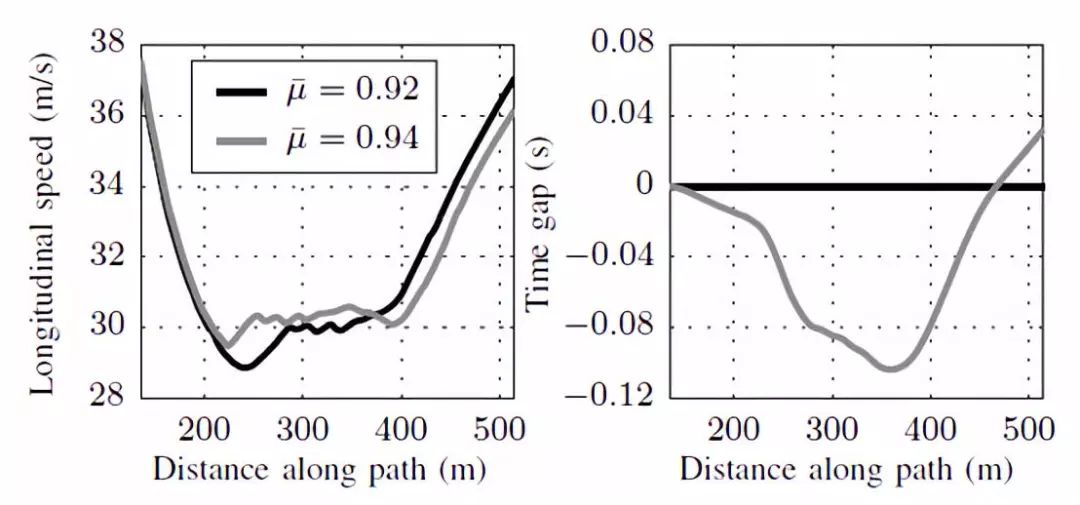
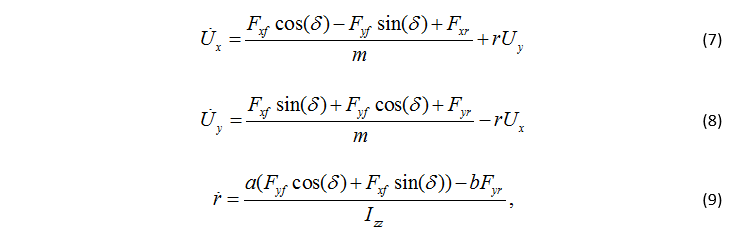
图 3第 2 道弯中测量的速度数据(左)
和相应的时间差距(右)
(跟踪分别由 μ=0.92 和 0.94 生成的不同速度配置)
C.轮胎模型
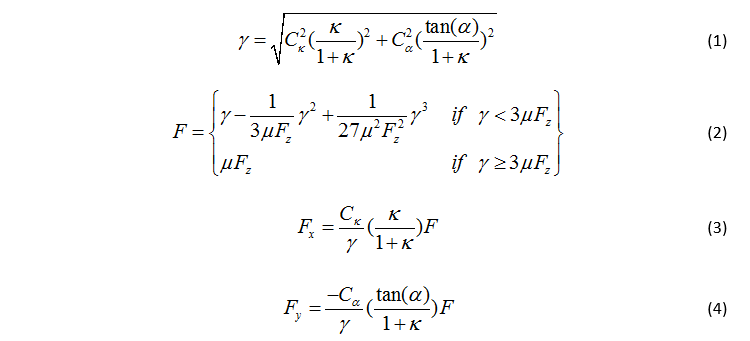
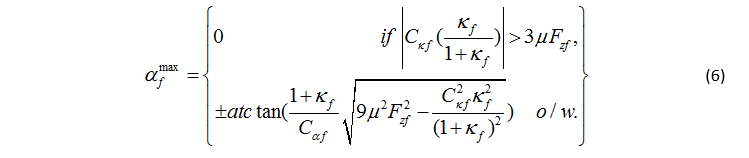
每个车轴上的等效集中车轮力是用单一附着系数的刷子轮胎模型来建模[12],例子可以参考 Hindiyeh 的论文[13]。在这一模型中,等效轮胎可以通过侧向刚度 Cα 和纵向刚度 Cκ 来表征,两个参数可以通过直线制动和斜坡转角输入来辨识得到,后者在 Voser 的论文[14]中有介绍。纵向力 Fx 和侧向力 Fy,如图2 所示,是侧偏角 α、滑移率 κ、垂直载荷 Fz 以及路面附着系数μ的函数。当 γ≥3μFz 的时候,轮胎出现饱和,并且有最大轮胎力。在单纯转向操作过程中,没有驱动力矩或者制动力作用在车轮上,κ=0,对应最大侧向力的峰值侧偏角 αpeak 为:

3 极限行驶
图3 是无人驾驶车辆在经过第二个弯道(一个较长的左转弯)的纵向车速。参考路径是基于回旋曲线非线性优化得到的[15]。而这二维的路径对应的速度分布图是综合考虑三维地形因素得到的[16]。分别跟踪的两个不同的速度分布图如图3:其中一个要求路面附着系数大于 0.92,另外一个稍微快一点的则要求附着系数大于 0.94。这两组估计值是通过经验值选取的,并且是为了最小圈速而选择的。
A.无人驾驶车辆路径跟踪的速度跟踪和独立转向控制
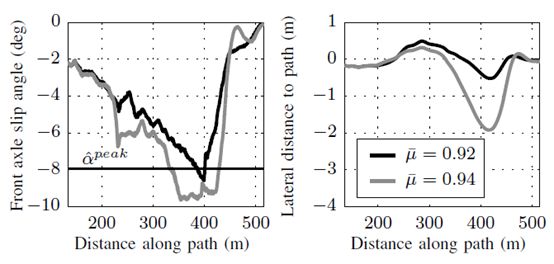
图 4第 2 道弯中测量的前轴侧偏角(左)
和侧向位移误差(右)
(跟踪分别由 μ=0.92 和 0.94 生成的不同速度配置)
另外图3 还指出了沿着参考路径行驶时以更快的速度分布图为目标的车辆相对另一辆的时间差距。不同的车辆行驶距离和速度下,相对的时间差距都在变化,这与轮胎利用程度有关。
跟踪较快的速度图的车辆以稍微快一点的车速入弯。而且在弯中的车速也是附着系数估计值更大的车辆更高,负的相对时间差距表明,在弯道的前部分,跟踪较大附着系数估计值对应速度图的车辆耗时更少。但是,在出弯之前,车辆的速度开始降低,出口处的车速甚至比跟踪低附着系数估计值对应速度图的车辆更低。尽管该车在弯中以前领先了 0.1s,但是最终它完成整个转弯工况耗费了更多的 0.03s。
伴随着更高的速度分布图,初始的车辆侧偏角更大,如所示。相对地,低附着系数估计值的车辆的前轴侧偏角则缓慢地增加至 -8 度。联邦 595EVO 轮胎的斜坡转角输入测试数据表明该款轮胎的峰值侧偏角大约是 7.9 度。在弯道的后半段,车辆跟踪较高附着系数估计值对应的速度图时的侧偏角超过了峰值点,因此前轮轮胎力饱和了。由于侧向力发生饱和,车辆的纵向控制器将驱动力矩降低到零,再加上前轴侧向力矢量的额外旋转带来的阻力,车辆的速度降低的更多。前轴在这样的车速下不能产生足够的侧向力来维持车辆行驶在参考路径上,在图4 可见,由于车辆滑向弯道外侧,侧向位移误差也逐渐增大。
当车辆以更高的车速行驶的同时还能跟踪上目标路径,这意味着 μ=0.94 对应的车辆在弯道的前半部分能够更好地利用轮胎的附着力。但是在弯道的后半部分,该车不再能够跟踪上目标的路径,最后花了更多的时间来完成整个弯道。在这里,附着系数估计值为 μ=0.92 的车辆能够更有效地利用轮胎附着力。这一结果以及更多的测试都表明,现有的控制系统要求附着系数的估计误差在大约 2% 以内才能满足路径跟踪的要求。
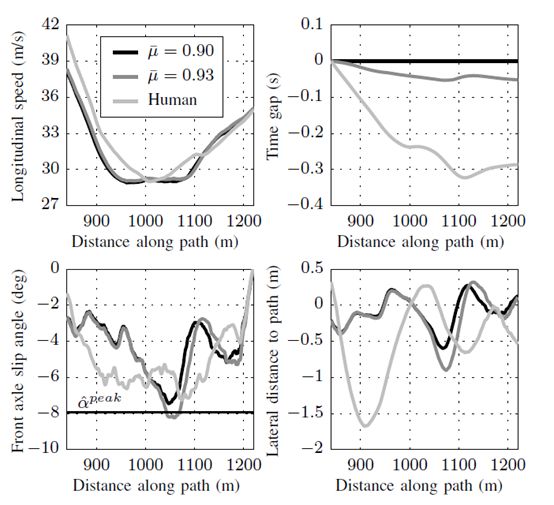
图 5专业驾驶员在第二道弯相比于跟踪 μ=0.90 和 μ=0.93 的速度分布图的无人驾驶车辆的各项性能表现
B.有人驾驶 VS.无人驾驶
图5 对比了无人驾驶在跟踪参考路径时和专业赛车驾驶员的纵向车速、时间差、前轴侧偏角和侧向位移误差。这条路径时通过凸函数优化方法生成的,与 Kapania 的方法类似[17]。图中三条曲线分别是无人驾驶车辆跟踪 μ=0.90 和 μ=0.93 的速度分布图时的数据以及驾驶员十圈内最好的成绩。
开始阶段,由于明显更高的入弯速度,赛车驾驶员相比无人驾驶模式领先了 0.24s。他沿着较宽的入弯路线行驶,然后迅速获得了大约 -6 度的前轴侧偏角,并且在整个弯道都保持在这个值附近。他的最高车速和无人驾驶模型下的车辆很接近,但不同的是,他在驶出弯道前迅速提高了车速。当无人驾驶模式的车辆以 μ=0.93 的速度分布图行驶时,车轮在弯道中间达到饱和,大概是 1000m 的位置,从而车辆失去了路径跟踪的能力,因此损失了大约 0.02s。
相反,专业驾驶员在弯道很早的部分就前轴获得了大约 -6 度的侧偏角。这意味着车辆在制动之后能够迅速获得较大的侧向力。而无人驾驶的车辆在前轴处产生的侧偏角使得车辆获得较小的侧向力,因此轮胎的附着力并没有得到完全利用。通过将侧偏角维持在 -6 度左右,驾驶员能够在整个弯道中都有效地利用轮胎的附着能力,使得他相比无人驾驶的车辆能够以更少的时间完成整个弯道。
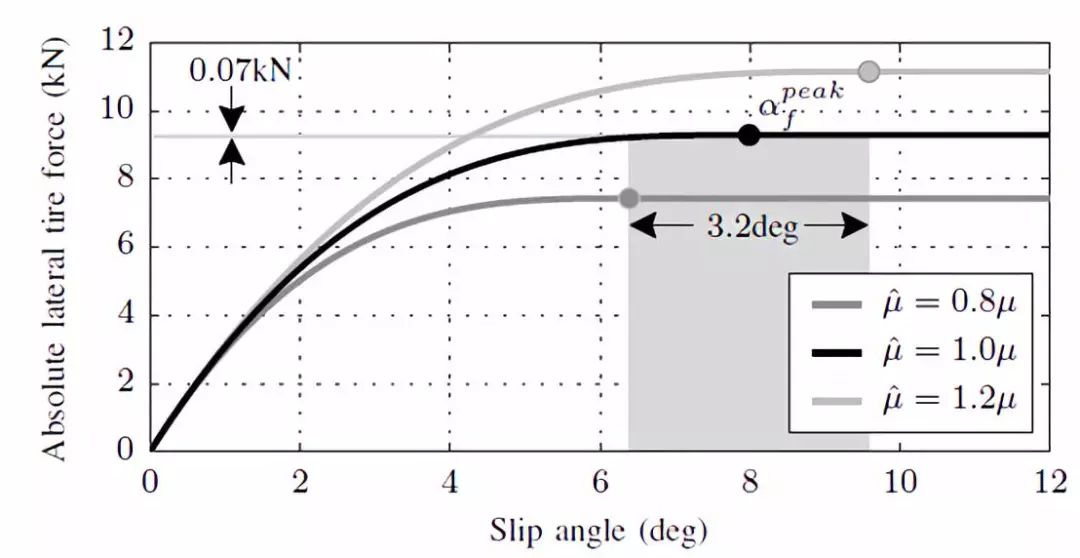
图 6不同附着系数下侧向力和轮胎侧偏角的关系,以及由(4)计算得到的峰值侧偏角对联邦 EVO595 轮胎而言,Cαf=200kN/rad,μf=0.97,κf=0
4 极限工况下的路径跟踪
A.极限工况下的侧偏角控制方法
图6 分别指出在不考虑纵向滑移率以及路面附着系数估计值等于实际值或相差 20% 的条件下,侧向力和轮胎侧偏角之间的关系曲线。同时还标出了相应的峰值侧偏角。
通过在线估计路面附着系数和公式(5),可以计算得到峰值侧偏角作为转角控制的目标以实现轮胎附着能力的最大化利用。考虑实际路面估计精度的限值,当路面附着系数高估了 20% 的时候,由于轮胎曲线的特性,即使轮胎处于较大的侧偏角下依然能够产生最大的侧向力。当附着系数低估 20% 的时候,轮胎侧偏角的峰值点被低估了约 1.6 度,可是此时的轮胎力仅仅下降了 0.8%。
图6 表明,在一个相对较大范围内的侧偏角,轮胎的侧向力都比较接近峰值点。因此,在极限工况下,基于轮胎侧偏角设计的控制器比一般基于精确的最大速度限值的控制系统对路面附着系数的估计精度要求更低,而且性能要求也比较合适。
B.在线估计路面附着系数
Ray[5]-[9]指出,贝叶斯假设测试算法能够在车辆的操纵极限工况下提供一个实时的路面附着系数估计结果。事实证明,由于前后轴轮胎力产生的横摆力矩以及试验车辆上安装了不可控的主动制动力分配系统(EBD),不能准确地获取轮胎力。然而,通过引入拓展卡尔曼滤波的估计器,通过测量车辆的速度、加速度、姿态角和角速度,能够很好地估计出作用在车辆上的外力和外力矩。
接下来,在估计器的第二部分引入了车辆的单轨模型假设。通过估计的合力以及单轨模型中前后轴轮胎力的静态关系,即使在不完全平整的路面上也能够得到满足稳态转向工况下附着系数估计要求的轮胎力。前后轴的路面附着情况假设一致,并且通过估计的侧向力和合力最终得到附着系数的估计结果。
C.转角控制器设计
本文主要研究极限工况下的不足转向车辆,因此,设计的转角控制器主要是控制前轴的轮胎力。最大的轮胎力对应的轮胎侧偏角可以通过公式(2)计算得到:
前轴的等效纵向滑移率是通过对左右侧车轮的滑移率加权得到的,在侧向加速度增加到 7m/s2 时,由于侧向载荷转移的关系,外侧车轮的权重接近 80%。通过测量的纵向滑移率和实时路面附着系数估计结果可以计算得到前轴的最大侧偏角。而这个侧偏角就直接作为底层转角控制器的输入,方向由目标路径的曲率确定。
D.极限工况下的路径跟踪控制
图2 中平面三自由度的单轨车辆模型的状态方程如下:
其中,m 和 Izz 分别是车辆的质量和横摆转动惯量。a 和 b 分别是质心到前轴和后轴的距离。
在稳态条件下,假设转角和前轴的纵向力都比较小,公式(8)可以简化为:

如果前后轴同时处于最大的轮胎力,并且每根轴的附着能力都由单一附着系数来表征,那么横摆角速度和车速之间的耦合关系可以用式(11)来表示。

文献[18]中,Goh 和 Gerdes 针对漂移车辆设计了一个用横摆角速度作为输入的路径跟踪控制器。而在本文中,类似的控制器可以作为车辆极限工况下的路径跟踪控制器,利用纵向速度来控制预瞄点的误差:

其中,xLA 是预瞄距离。通过引入稳态的质心侧偏角,当车辆模型足够精确时便可以消除预瞄点的误差,从而使车辆准确跟踪稳态的转向。预瞄点的误差导数为:

其中,K 是路径的曲率。假设预瞄点的误差具有稳态的一阶动态,则:

曲率为 K 的路径在附着极限下的稳态车速大概为:

将式(12)和(13)代入(14),可得,

得到横摆角速度作为虚拟的控制输入:

当误差为零、航向角误差等于质心侧偏角的时候,车辆的控制横摆角速度便等于参考路径的航向角速度。最后,通过式(11)可以将横摆角速度控制输入转化为路径跟踪控制器的纵向速度控制量:

当预瞄点在弯道的内侧时,误差过大会导致目标的横摆角速度方向和路径的曲率相反。此时,为了保证车辆加速并跟踪上参考路径,目标车速将会过大。
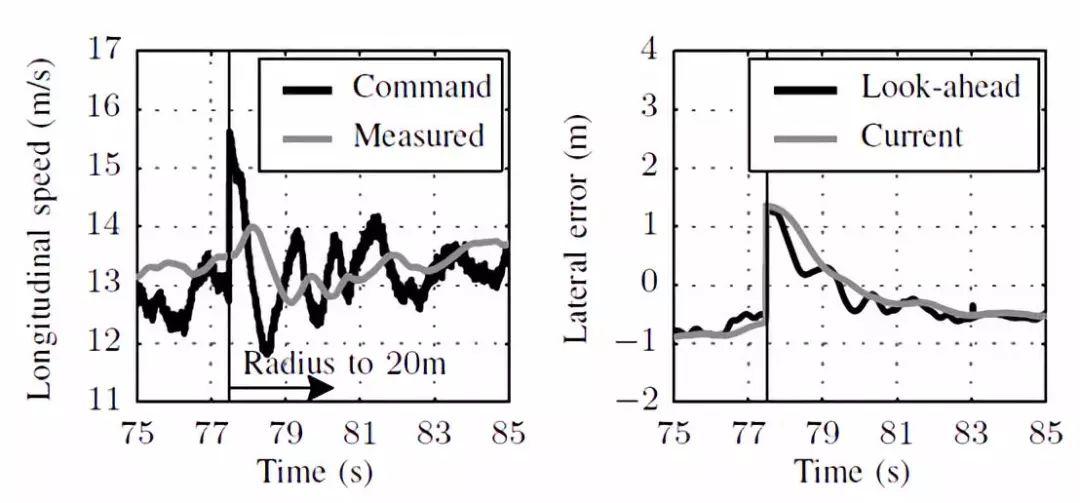
图 7跟踪的纵向车速(左)和预瞄点以及实际的侧向位移误差(右)
为了简化控制算法,采用了比例反馈控制来跟踪参考的纵向车速,并且为了补偿路面的阻力和坡度,采用了前馈控制。

目标的车速控制可以通过发动机的 MAP 图和电子节气门来实现。
5 试验结果
试验车辆安装了普利司通的 Potenza S-04 轮胎来测试新的控制系统。斜坡转角输入的测试结果表明车辆的前后轴轮胎的等效侧偏刚度分别为 220kN/rad 和 240kN/rad,附着系数分别为 0.99 和 1.04。直线制动测试结果表明前后轴的有效纵向刚度为 450kN。控制器中的参数 XLA=10m,kp=1/s,kspeed=1000Ns/m。参考路径设为一个半径突变的逆时针圆周,从而验证车辆的路径跟踪性能。试验场地路面为向西倾斜 2.5 度的干净柏油路面。
图 8 分别是路面附着系数的估计结果和轮胎侧偏角跟踪目标值,圆周半径在 77.5s 的时候从 18m 变为 20m。基于估计的轮胎参数,峰值侧偏角为 7.4 度。测量的侧偏角比目标值稍大,可能是由于侧偏角控制器中转向力矩的建模存在一定误差,但是前轴的轮胎力也得到了充分的利用(如图6 所示)。估计器的路面附着系数估计结果在 1 和 1.1 之间,与转角斜坡输入工况下的估计结果一致。
图 7 是车辆跟踪路径时的车速目标值和测量值。较小的 kp 和较大的 kspeed 参数对车速跟踪控制效果更好。如图9 所示,侧向位移误差在转向半径突变后逐渐收敛,并最终稳定在 1m 左右,车辆在目标轨迹的外侧。而这部分偏差还需要更深入的研究。
图 8路面附着系数估计结果(左)和路径跟踪的前轴侧偏角的目标值和测量值(右)
图 9路径跟踪结果(俯视)
6 结论
试验数据表明在路径跟踪过程中的速度跟踪控制和转角控制需要路面附着系数的估计误差在大约 2% 以内。然而,基于轮胎侧偏角设计的转角控制能够有效降低系统对于路面附着系数估计结果精度的依赖。采集到的专业赛车驾驶员数据指出通过侧偏角控制能够使得不足转向的车辆更充分地利用轮胎的附着能力,并且可以通过速度反馈来实现路径跟踪。
为了验证这一理念,设计了根据虚拟横摆角速度控制输入得到的速度控制量来进行路径跟踪。贝叶斯滤波在线估计器和试验数据表明,即使在路面附着系数不确定的条件下,控制器也能够很好地跟踪上圆周路径。
不管是在赛道竞速或者公路上的紧急工况,文章设计的控制架构在极限工况下的无人驾驶都能够有很好地应用前景。未来的研究将进一步考虑纵向车速控制的建模、不同控制系统对附着系数的灵敏度、变曲率的路径跟踪、地形和轮胎的影响、以及路面附着系数不一致的情况。
7 参考文献
[1] K. Kritayakirana, “Autonomous vehiclecontrol at the limits of handling,” Ph.D. dissertation, Stanford University,2012.
[2] C. E. Beal and J. C. Gerdes, “Modelpredictive control for vehicle stabilization at the limits of handling,” IEEETransactions on Control Systems Technology, vol. 21, no. 4, pp. 1258–1269,2013.
[3] Y.-H. J. Hsu, S. M. Laws, and J. C.Gerdes, “Estimation of tire slip angle and friction limits using steeringtorque,” IEEE Transactions on Control Systems Technology, vol. 18, no. 4, pp.896–907, 2010.
[4] J.-O. Hahn, R. Rajamani, and L.Alexander, “GPS-based real-time identification of tire-road frictioncoefficient,” IEEE Transactions on Control Systems Technology, vol. 10, no. 3,pp. 331–343, 2002.
[5] L. R. Ray, “Nonlinear estimation ofvehicle state and tire forces,” in American Control Conference, 1992. IEEE,1992, pp. 526–530.
[6] L. R. Ray, “Real time determination ofroad coefficient of friction for IVHS and advanced vehicle control,” inAmerican Control Conference, Proceedings of the 1995, vol. 3. IEEE, 1995, pp.2133–2137.
[7] L. R. Ray, “Nonlinear state and tireforce estimation for advanced vehicle control,” Control Systems Technology,IEEE Transactions on, vol. 3, no. 1, pp. 117–124, 1995.
[8] L. R. Ray, “Nonlinear tire forceestimation and road friction identification: Simulation and experiments,”Automatica, vol. 33, no. 10, pp. 1819–1833, 1997.
[9] L. R. Ray, “Experimental determinationof tire forces and road friction,” in American Control Conference, 1998.Proceedings of the 1998, vol. 3. IEEE, 1998, pp. 1843–1847.
[10] J. Subosits and J. C. Gerdes, “Asynthetic input approach to slip angle based steering control for autonomousvehicles,” in 2017 American Control Conference (ACC). IEEE, 2017 (in press).
[11] N. R. Kapania and J. C. Gerdes,“Design of a feedback-feedforward steering controller for accurate pathtracking and stability at the limits of handling,” Vehicle System Dynamics,vol. 53, no. 12, pp. 1687– 1704, 2015.
[12] H. Pacejka, Tyre and Vehicle Dynamics,3rd ed. Butterworth- Heinemann, 2012.
[13] R. Y. Hindiyeh, “Dynamics and controlof drifting in automobiles,” Ph.D. dissertation, Stanford University, 2013.
[14] C. Voser, R. Y. Hindiyeh, and J. C.Gerdes, “Analysis and control of high sideslip manoeuvres,” Vehicle SystemDynamics, vol. 48, no. S1, pp. 317–336, 2010.
[15] P. A. Theodosis and J. C. Gerdes,“Nonlinear optimization of a racing line for an autonomous racecar usingprofessional driving techniques,” in ASME 2012 5th Annual Dynamic Systems andControl Conference joint with the JSME 2012 11th Motion and VibrationConference. American Society of Mechanical Engineers, 2012, pp. 235–241.
[16] J. Subosits and J. C. Gerdes,“Autonomous vehicle control for emergency maneuvers: The effect of topography,”in 2015 American Control Conference (ACC). IEEE, 2015, pp. 1405–1410.
[17] N. R. Kapania, J. Subosits, and J. C.Gerdes, “A sequential two-step algorithm for fast generation of vehicle racingtrajectories,” Journal of Dynamic Systems, Measurement, and Control, vol. 138,no. 9, p. 091005, 2016.
[18] J. Y. Goh and J. C. Gerdes,“Simultaneous stabilization and tracking of basic automobile driftingtrajectories,” in 2016 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2016,pp. 597–602.
-
奥迪
+关注
关注
4文章
512浏览量
33584 -
无人驾驶
+关注
关注
97文章
3872浏览量
118945
原文标题:斯坦福大学:极限工况下的无人驾驶路径跟踪|厚势汽车
文章出处:【微信号:AItists,微信公众号:人工智能学家】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
如何利用无人机物联卡实现无人驾驶飞行
用于自动驾驶,无人驾驶领域的IMU六轴陀螺仪传感器:M-G370
5G车载路由器引领无人驾驶车联网应用

完成4.5亿元股权融资!易控智驾跑出矿山无人驾驶规模化落地“加速度”
无人驾驶技术有哪些关键技术?
无人驾驶汽车的安全挑战及其影响

用户之声 | 胜利能源无人驾驶项目取得新突破

工业路由器助力无人驾驶方案解析
易控智驾亮相国能集团露天卡车无人驾驶现场推进会

探维王雨晴:激光雷达助力低速无人驾驶产业规模化发展

无人驾驶汽车的路径规划与跟随控制算法案例
友道智途获全国首批无人驾驶路测牌照
自动驾驶、自主驾驶、无人驾驶有什么区别






 工商网监
工商网监
评论