 微软宣布Window10将正式引入机器人操作系统
微软宣布Window10将正式引入机器人操作系统
日前,在西班牙召开的第七届机器人操作系统开发者大会(ROSCon 2018)上,微软官方宣布Window10将正式引入机器人操作系统(ROS)。
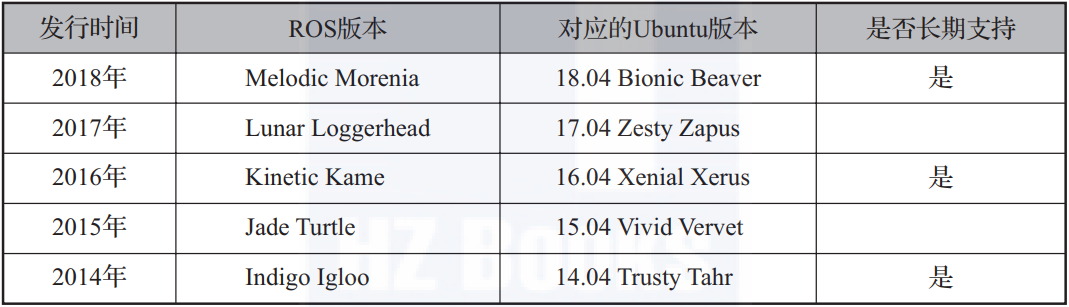
ROS是由Willow Garage 和斯坦福人工智能实验室维护的开源系统,用于机器人标准化设计,每一位机器人设计师都可以使用该平台进行机器人软件开发。ROS被广泛应用于许多尖端机器人项目,使得设备控制、硬件抽象描述以及其他服务得以实现。
这款适用于Windows10的机器人操作系统名为ROS1,虽然目前还只是实验版本,但这是Windows官方首次支持的机器人系统,而在此之前ROS、Windows的适配都是由ROS社区自发完成的。ROS1可提供开发复杂机器人所需的库和工具,并支持基于硬件加速的Windows机器学习、Azure Cognitive服务、Azure IoT云服务等。
目前,微软已经联合ROS产业联盟(ROS Industrial Consortium),共同投资工业机器人,并与ROS产业联盟、开放机器人(Open Robotics)合作推动Windows 10 ROS1。通过合作,微软将获得ROS1的文档、开发和部署解决方案,同时分发Window优化版的ROS,扩大ROS 的生产能力,并提高工业机器人的生产力和投资回报。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
微软
+关注
关注
4文章
6218浏览量
103072 -
机器人
+关注
关注
206文章
26979浏览量
201310 -
操作系统
+关注
关注
37文章
6269浏览量
121845
原文标题:微软为Window10引入机器人操作系统
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
Windows引入AI助手!从搜索引擎、办公软件,到操作系统!微软带来的技术变革!
人工智能助手“Windows Copilot”,以便用户能够在Windows系统中获得聊天机器人体验。 从搜索引擎到操作系统,微软带来的变革
服务器操作系统有几种?
、Windows 2003
Windows Server 2003是微软公司应用场景Windows XP/NT5.3开发设计的网络服务器电脑操作系统,2003年宣布上市,20
15年微软
发表于 03-29 16:59
window10下载了STLINK接口检测,却检查不到接口怎么解决?
window10下载了STLINK接口检测,却检查不到接口,开发板没办法使用自带的STLINK仿真器,想要用自己的JLINK仿真器应该怎么接线
发表于 03-29 07:36
LabVIEW的六轴工业机器人运动控制系统
将系统分为算法实现和仿真模块、DSP控制模块、及机器人驱动模块,以验证算法的有效性。
KUKA KRAGILUS工业机器人的实体控制测试:最终,项目工业
发表于 12-21 20:03
高动态人形机器人“夸父”通过OpenHarmony 3.2 Release版本兼容性测评
近日, 搭载KaihongOS的“夸父”人形机器人通过OpenAtom OpenHarmony(以下简称“OpenHarmony”)3.2 Release版本兼容性测评并获颁兼容性证书 。这体现了
发表于 12-20 09:31
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进
发表于 11-30 16:01
稳石机器人|日化行业智慧物流:打造高效绿色供应链
成本
稳石机器人智能化仓储设备的引入和自动化操作的实现大大减少了对人力资源的依赖。曾经需要大量人力进行的搬运、备料操作现在可以由WS300s代替完成,从而降低了人工成本,并将人力资源从
发表于 09-21 13:45
基于Matlab和VR技术的移动机器人建模及仿真
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的机器人遥操作试验搭建了仿真平台 。
发表于 09-20 06:24
【IoT毕设】机智云平台+STM32+树莓派的草莓采摘机器人控制系统
、驱动电路、编码器的连接电路等进行PCB设计和打样。底层硬件程序框架 采用了RT-Thread实时操作系统,视觉识别程序运行在树莓派中并使用无线模块将采摘信息和机器人状态上传至机智云物联网,可在电脑端和手机端同时查看。
发表于 08-16 17:35

ROS机器人操作系统
可能很多初学者听到机器人操作系统,就被“操作系统”几个字吓住了。其实简单点说,**ROS就是一个分布式的通信框架,帮助程序进程之间更方便地通信。
ROS机器人操作系统的实现原理(下)
本文介绍ROS机器人操作系统(Robot Operating System)的实现原理,从最底层分析ROS代码是如何实现的。
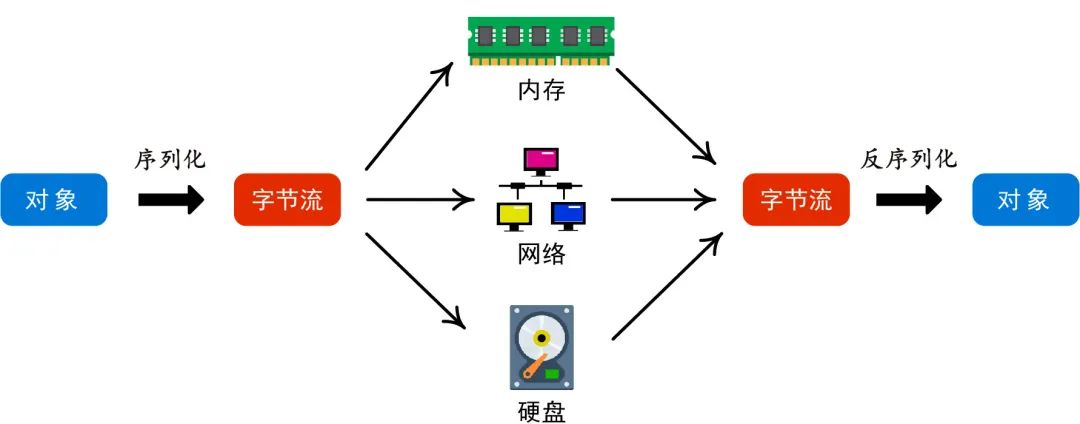
**1、序列化**
把通信的内容(也就是消息message)序列化是通信的基础,所以我们先研究序列化。
ROS机器人操作系统的实现原理(上)
本文介绍ROS机器人操作系统(Robot Operating System)的实现原理,从最底层分析ROS代码是如何实现的。
**1、序列化**
把通信的内容(也就是消息message)序列化是通信的基础,所以我们先研究序列化。
浅谈儿童陪护机器人
。步进电机芯片通过将控制信号转化为驱动信号,实现了机器人转动的精准控制,从而满足了儿童陪护机器人对转动控制的需求。
在儿童陪护机器人中,步进电机芯片有着广泛的应用场景。例如,儿童陪护
发表于 05-11 15:12





 工商网监
工商网监
评论