 关于工业机器人的四类坐标系概述
关于工业机器人的四类坐标系概述
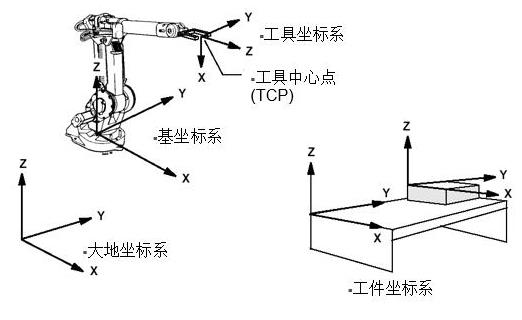
在我们工业机器人定义中,有四类坐标系,他们分别是轴坐标系、世界坐标系、工具坐标系、基座坐标系。
1、轴坐标系
(1)机器人每个轴均可以独立的正向或者反向移动。
(2)使用6D鼠标可以使轴运动。
2、世界坐标系
(1)世界坐标系是一个固定的直角坐标系,默认为世界坐标系位于机器人底部
(2)使用6D鼠标可以使轴运动。
()3)可以通过“mouse position”菜单调整鼠标的位置,使之与操作员操作位置相符,可以通过-/+软键改变位置,每次调整45°。
示意图一
示意图二
3、工具坐标系
工具坐标系是一个直接坐标系,原点位于工具上,请参考以下示意图:
4、基座坐标系
以目标工件货工作台为基准的直角坐标系。
5、坐标系的选择
坐标系可以根据机器人提供的人机对话控制面板进行选择:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
206文章
27025浏览量
201377 -
工业机器人
+关注
关注
90文章
3263浏览量
91892
原文标题:工业机器人编程教程-坐标系统
文章出处:【微信号:indRobot,微信公众号:工业机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
零基础玩转工业机器人
地展示了搭建工作站、创建系统、创建坐标系、创建机器人运动路径、创建Smart组件、仿真调试等操作。4、工业机器人知识要点解析本书基于IRB120工业
发表于 10-29 17:03
KUKA机器人问题解答
1 开机坐标系无效 世界坐标系是以枪头为基点,在这种坐标系中机器人所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果机器人在
发表于 07-15 07:48
如何处理四轴东北天坐标系和北东地坐标系不同时传感器输出的数据方向?
问题如下:我在阅读发烧友的四轴代码时,发现四轴是用的北东地坐标系,我现在有两个疑问:1)使用东北天坐标系和北东地坐标系,重力向量都是[0 0
发表于 07-16 04:35
如何计算才能把坐标系转换成水平的坐标系?
当mpu6050初始放置的时候是倾斜的,如何计算才能把坐标系转换成水平的坐标系?转换后的效果是保证倾角不变,水平转动mpu,出来的数据是水平转动的。我用当前四元数与初始的四元数做差,得
发表于 07-31 22:19
CAD制图软件新手攻略:坐标系及标注坐标
坐标系。下面就来给大家详细介绍一下浩辰CAD制图软件中坐标系及标注坐标的方法吧!首先一起来复习一下关于数学中的坐标系概念。1、笛卡尔
发表于 09-23 10:28
介绍坐标系和机器人之间的纽带即连杆坐标系
介绍坐标系以及它们之间的变换关系,数学的意味还是很浓的。讲了那么多的公式和规律,它们要怎么用在机器人上呢?这篇文章将介绍坐标系和机器人之间的纽带即连杆
发表于 09-01 06:17
机器人基坐标系标定方法研究
针对借助激光跟踪仪标定机器人所涉及的坐标系统一问题,对基于空间几何法拟合建立的基坐标系与机器人理论基坐标系的转换关系进行了研究,提出了一种基
发表于 03-07 10:43
•2次下载
机器人4大坐标系讲解
任何机器人都离不开基坐标系,也是机器人TCP在三维空间运动空间所必须的基本坐标系(面对机器人前后:X轴 ,左右:Y轴, 上下:Z轴)。

机器人中都有哪些坐标系
坐标系是我们非常熟悉的一个概念,也是机器人学中的重要基础,在一个完整的机器人系统中,会存在很多坐标系,这些坐标系之间的位置关系该如何管理?






 工商网监
工商网监
评论