 基于DSP芯片和运动控制算法实现开放式并联运动机床的控制系统的设计
基于DSP芯片和运动控制算法实现开放式并联运动机床的控制系统的设计
并联机床(ParallelMachineTool)又称虚拟轴机床 (VirtualAxisMachineTool)或并联运动学机器,是基于并联机构的新型数控加工设备,实质上是机器人技术、机床结构技术、数控技术等相结合的物,它同时兼顾了机床和机器人的诸多特性,既可以看作是机器人化的机床, 又可以看作是机床化的机器人 。它能够提供机器人的灵活与柔性,又具有机床的刚度和精度,是集多种功能于一体的新型机电设备。
1、并联机床的结构
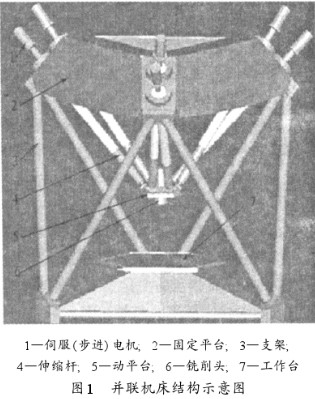
并联机床结构示意图见图1,它由伺服(步进)电机1、固定平台2、支架3、伸缩杆4、动平台5、铣削头6、工作台7等组成。安装在固定平台和动平台之间的伸缩杆由伺服电机(或步进电机) 驱动,带动伸缩杆内的滚珠丝杠和螺母运动,使伸缩杆的长度发生变化。由于各伸缩杆(一般为6杆或3杆)的长度发生变化,使得动平台的位姿发生变化,多个伸缩杆共同运动,驱动动平台实现上升、下降、翻转等运动,带动铣削头实现工作所需的各种运动。各伸缩杆采用相互独立的伺服驱动装置驱动 。
2、开放式的控制系统结构
对于并联运动机床来说,其最大特点就是机械结构非常简单,而控制却异常复杂。并联运动机床的控制系统必须采用开放式结构。目前,国内外的开放式数控系统主要有如下3种结构形式 。
2.1、专用CNC十PC型
即在传统的非开放式的专用数控系统中嵌入机,使得整个系统可以共享一些计算机软硬件资源 。部分完成系统管理等非实时控制任务,实现辅助编程、分析、监控和编排工艺等功能;CNC部分负责完成插补计算、伺服控制以及I/O控制等一些实时控制任务。这种结构形式的数控系统其开放性只在机部分,其专业的数控部分仍处于封闭状态,不能实现CNC内核的开放,此类结构形式一般为主流数控系统厂商所采用。
2.2、 PC+运动控制
卡这种基于开放式运动控制卡的系统结构是以通用微机为平台,以标准插件形式的开放式运动控制卡为控制核心。通用PC机实现数控程序编辑 、人机界面管理、外部通信等功能,运动控制卡负责机床的运动控制和逻辑控制。它支持用户的二次开发和自主扩展,既具有PC机的开放性,又具有专用数控模块的开放性,可以说它具有上、下两级的开放性。
2.3、纯PC型
即全软件形式的PC机数控系统,该系统是指的全部功能均由PC机进行处理, 并通过装在扩展槽中的伺服接口卡对伺服驱动等进行控制。其软件的通用性好,编程处理灵活,但存在着操作系统的实时性、标准统一性以及系统稳定性等问题。目前这类系统正处于探索阶段,还尚未形成产品,但它代表了数控系统的发展方向。
如果着眼于经济型数控并联机床控制系统的设计,选择PC+运动控制卡的开放式数控系统是当前最为理想的。以PC机和运动控制卡为控制系统核心,直接将系统平台构筑于PC机的软硬件基础之上,驱动元件为步进电机,系统在Windows环境下用VC++ 语言实现,软件的设计采用面向对象的方法。
3、基于PCI总线的并联机床运动控制卡设计
并联机床运动控制卡通过控制机床各个驱动杆实现主轴的运动,控制轴数较多,同时还要得到所要求的刀具运动轨迹。要实现刀具的高速、高精度轨迹控制,运动控制卡和PC机存在着大量的数据交互,传统的方式是采用ISA总线进行,由于ISA总线带宽限制,数据传输速度慢,使PC机在数据传输方面花费的时间较多,从而在其它方面的处理时间相对缩小。本系统实现运动控制卡与PC机通信,能够达到很高的数据传输速率,使PC机的处理能力大大增强,从而保证了数控系统的实时性,并且使开发相应的基于平台的数控软件更容易,和配套的其它软件的接口更方便。
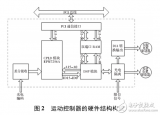
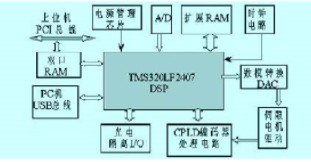
控制系统硬件组成图见图2。该系统采用的是公司的32位定点DSP芯片TMS320VC33 。DSP芯片负责接受PCI局部总线的命令和参数,然后通过运动控制算法完成对步进电机的精确运动控制,同时芯片还负责将反馈信息传输给PCI局部总线,并且控制系统外围I/O模块。DSP与PC机的通信通过桥接芯片CY7C09449PV实现。

3.1、CY7C09449PV与PC机的连接
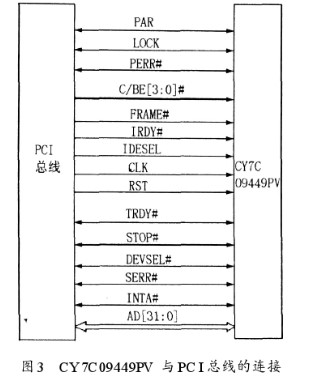
总线是目前应用最广泛、最流行的一种高速同步总线,具有64位总线宽度,工作频率33MHz,最大传输速率可以达到132Mb/s。它可将外设直接挂到主机CPU局部总线上并以CPU速度运行,可以大大提高外设的运行速度。DSP与PC机的通信通过连。CY7C09449PV是Cypress 公司提供的符合PCI2—2总线规范的功能完善、价格低廉的双端口RAM 接口芯片。其中,一个端 口是PCI接口,适合与PC机通信;另一端口为本地接口。 它提供主/目标接口, 可以同任何通用微处理器连接,片内有128双端口存储器用于局部处理器与PCI总线数据共享。CY7C09449PV与PCI总线的连接见图3 。
3.2PCI 总线开发方案的实现
专用芯片CY7C09449PV采用3.3V单电源供电,兼容3V和5V的PCI信号环境。电源可由PCI 槽引出,PCI 槽可以提供3.3 V、5V电压,在PCI 槽需特别注意两个引脚 P RS NT1 和,这两个引脚接地和悬空的4种组合直接决定 PCI卡的功率。CY7C09449PV在使用时,某些引脚要加阻值为l kfI ~10kfl的下拉或上拉电阻。根据具体情况, 在该设计中, SCI 、S DA、AIE、/BE[ 2 ] 、RDY —引脚加上拉电阻, TEST—MODE引脚加下拉电阻。
是TI公司新推出的系列新一代浮点DSP,它是在原来浮点DSP的基础上开发的一个价格更低的版本,该产品以高速、低功耗、低成本、易于开发为显著的特点。由于它采用了内部1 。 8 V、外部。 3 V供电 ,因而功耗比原有型号降低了大约一个数量级,而且能支持高达150 ×10次/s的运行速度,是需浮点运算的便携式产品中的一种理想的DSP器件 。
作为控制系统的核心, TMS320VC33主要完成实时中断的伺服控制程序,包括对各种底层硬件的操作。它采用32 位局部总线接 口方式, 时钟信号可以是单独提供的时钟源,也可以是 CY7C09449PV提供的 PCI 时钟信号 PCI KOUT[20] 中任意的一个。
4、结束语
并联机床需要控制的轴数比较多,而且牵涉到并联机构的正逆解运算,运算量比较大,采用基于总线的运动控制卡,整个数控系统的任务就由PC机和运动控制卡来共同承担,在开放式数控系统中能够发挥出理想的运动控制性能。随着数控系统的普及和产品档次的提高,这种运动控制卡将会有广泛的应用前景 。
责任编辑:gt
-
电源
+关注
关注
182文章
16549浏览量
244680 -
dsp
+关注
关注
544文章
7681浏览量
344332 -
芯片
+关注
关注
446文章
47769浏览量
409068 -
控制系统
+关注
关注
41文章
5962浏览量
108685
发布评论请先 登录
相关推荐
【TL6748 DSP申请】基于DSP的四自由度机器人运动控制卡的研究
如何利用DSP与FPGA设计运动控制器?
基于DSP芯片的多轴运动控制系统的开发
开放式四轴运动控制器方案

基于DSP和CPLD实现开放式运动控制器的设计





 工商网监
工商网监
评论