 基于嵌入式PC与EtherCAT技术实现步进电机运动控制系统的设计
基于嵌入式PC与EtherCAT技术实现步进电机运动控制系统的设计
该系统为某主机电控系统,完成对光束的准直过程中的参数诊断、数据采集、闭环控制等实时控制功能以及与主控系统的通信功能。步进电机以性价比高,实时效果好,不需要昂贵的反馈系统著称,该系统中采用了一千多个步进电机来实现对光束的准直。神光原型采用控制卡控制大量步进电机,控制卡控制步进电机没有负载位置的反馈信号,实时效果差,故障定位非常困难;试验中采用西门子PLC(Programmable Logic Controller,可编程逻辑控制器)控制这些电机可靠性好,但控制少量步进电机时比较简单,控制大量步进电机时时序复杂,接线复杂,成本高,调试困难。最终方案采用德国Beckhoff公司的自动化产品,如嵌入式控制器,现场总线端子、步进电机总线端子等设备控制电机,该方案具有成本较低、操作简便、占用空间小等优点,也提高了系统的性能和可靠性,现已通过试验和评审进入调试阶段。
1 、步进电机运动控制系统总体设计思想
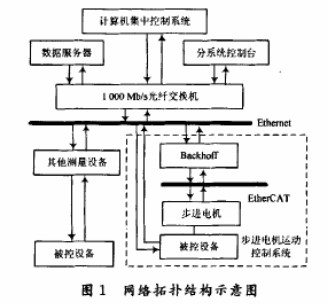
电控系统的总体设计思想为:控制系统设计应分别满足现场独立控制与远程集中控制,各子系统具备对系统各类设备的状态进行实时监测的功能,包括故障定位检测和报警;具备对系统各设备进行参数设置、参数采集、存储、处理等功能。主控计算机位于主控制室内,通过1 000 Mb/s光纤网络与分控计算机通信,分控计算机通过光纤交换机与控制设备采用工业以太网通信,其网络拓扑图如图1所示。
2、 步进电机运动控制系统设计方案
2.1 倍福步进电机总体控制架构设计
采用基于嵌入式PC的模块化运动控制器,型号为CX1020,运动控制器本身集成双Ethernet接口,其中一个向上连接到现场工业以太网,接受运动控制的调用指令,另一个可以作为本地调试的网络接口。运动控制器、运动控制网络接口部件、步进电机驱动器通过硬实时的超高速以太网EtherCAT(Ethernet for Controland Automation Technology)构成运动控制网络系统,采用EtherCAT取代以往的现场总线传输技术,可以显著减少控制系统CPU的负荷,而且无需任何智能主站卡,适合集中式与分布式控制体系。
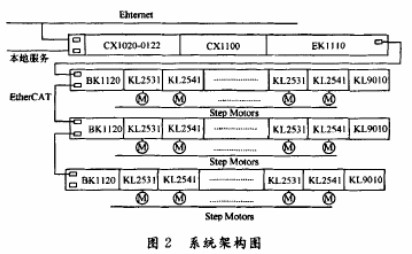
末端端子与底层EtherCAT总线耦合器端子BK1120相连,在本机架内总线耦合器通过K-Bus总线接口连接电机驱动总线端子KL2531和KL2541,步进电机直接连接在这两个端子上,如果使用KL2541端子,还需要在机架上安设数字输入端子KL1002,用于接人步进电机限位信号,最后在机架末端安放BK9010总线终端端子。
每级机架上总线耦合器BK1120的另一网络端口向下依次级联另一机架上的总线耦合器,最后从控制器到各级机架网络节点形成一个总线型的控制网络拓扑结构。KL2531和KL2541是步进电机总线端子,提供一路20 kHz的脉冲,可以各带一个步进电机。步进电机总体控制架构如图2所示。
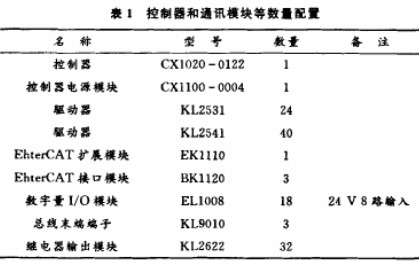
具体的控制器和通讯模块等数量配置见表1。
2.3 重要器件概述
运动控制器采用基于嵌入式PC的模块化运动控制器,型号为CX1020,处理器为Intel Celeron MULV1 GHz,内存为256 MB/512 MB/1 024 MB,操作系统为Microsoft Windows XP Embedded或MicrosoftWindows CE。该运动控制器应用于中等规模的控制系统中,自带两个工业以太网EtherCAT接口,其中一个向上连接到现场工业以太网,接受运动控制的调用指令,另一个可以作为本地调试的网络接口。软件开发平台TwinCAT PLC(The Windows Control and Automation Technology PLC)使用符合采用IEC61131-3的编程语言编程,运动控制功能库符合PLCopen标准,具有通用的、开放式软件接口。
EtherCAT是与PC控制技术相匹配的通讯系统,以Beckhoff开发的实时工业以太网解决方案,其特点是性能优越、操作简便。该技术采用标准的以太网帧,支持因特网技术。以太网可以直接到达端子,以太网过程接口可以从2位扩展到64个字节;350μs处理12 000个数字量I/O;100μs处理100个电机轴等。EtherCAT适合于多种网络拓扑结构,可用于设备控制、机器人、嵌入式系统、楼宇自动化、运输系统等。
步进电机历史悠久,爆发力好,便于控制并且扭矩大,在控制领域内占有相当重要的地位。步进电机是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”)。它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的。同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。我们采用北京四通的两相混合式步进电机,型号为28BYG250C,步距角为0.9/1.8,静态相电流0~7 A,保持转矩0.065 N/m,定位转矩0.005 N/m,转动惯量12 gcm2。
KL2531和KL2541是集成的步进电机控制器,是Beckhoff产品中用于传统驱动器高性价比的产品。KL2531和KL2541均可以提供和小型伺服驱动器相近似的性能,提供了最大64个最大中间步,并提供一路20 kHz的脉冲,一路脉冲驱动一台步进电机。KL2531总线端子用于较低性能场合,该端子是为简单的整合到24 V直流电压控制系统而设计的,每相尖峰电流1.5 A。KL2541可以提供高达5 A的最大电流,能够驱动扭矩高达5 Nm的步进电机。端子的输出阶段,有以温度过高警报并且关断的形式的过载保护,同时还有短路保护功能,诊断数据可以通过控制器的过程映像区来取得,自带两路高速输入通道,快速准确记录当前位置,或实现急停功能。输出脉冲可以通过“EnableBit”启动,电机的电流可以通过参数值来进行设定。对电机的配置可以通过软件来完成,这样总线端子能容易的进行更换,而且参数可以存储或者被转移到下一个工程,无需通过电位器或者指拨开关来设定。
3 、软件配置
Beckhoff公司基于PC平台的实时核技术可以将安装了Microsoft公司WindowsNT/2000/XP/CE.NET/XP嵌入式操作系统的普通PC和Beckhoff公司的嵌入式控制系统CX1000改造为具有实时能力的PC控制器。Beckhoff公司基于PC平台的实时核技术通过与3S公司提供的TwinCAT编程环境相结合,以及系统管理器对Beckhoff公司各种I/O设备的驱动程序相结合,使TwinCAT CP、I/O、PLC、PTP和NCI构成了一套完整的基于PC平台的实时控制器解决方案。
TwinCAT软件具备四套独立运行的PLC实时核,每套PLC都可分配4个任务,并且可以将最小任务周期时间设置为50μs(取决于所使用的CPU处理能力)。TwinCAT PLC控制是用于PLC的完整开发环境,所使用的编辑器和调试功能建立在高级编程语言开发环境基础之上,在TwinCAT PLC中可以使用IEC61131-3的五种不同语言创建PLC程序。TwinCAT实时任务运行的载荷率(TwinCAT实时任务运行时间与操作系统运行时间的比率)可调范围为10%~90%。并在此基础上,将伺服控制中的PTP、NCI和HMI技术拓展到系统管理器和TwinCAT编程环境中。
4 、结 语
该设计方案已经通过实验阶段进入正式调试阶段,在该过程中,可以发现倍福产品有很多优点,占用的空间小。现场总线端子的主要特点是性价比高,质量可靠,结构紧凑,坚固耐用,而且安装和接线非常方便。EtherCAT技术具有高度的通用性,基于EtherCAT的系统可以大大缩短研发速度。
责任编辑:gt
-
嵌入式
+关注
关注
4978文章
18256浏览量
288006 -
plc
+关注
关注
4972文章
12220浏览量
454693 -
步进电机
+关注
关注
149文章
2926浏览量
146012
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论