 浅谈STM32之SPI_FLASH之应用实例
浅谈STM32之SPI_FLASH之应用实例
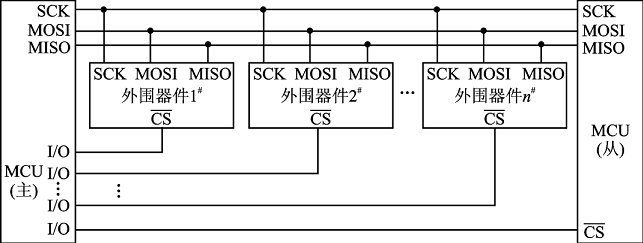
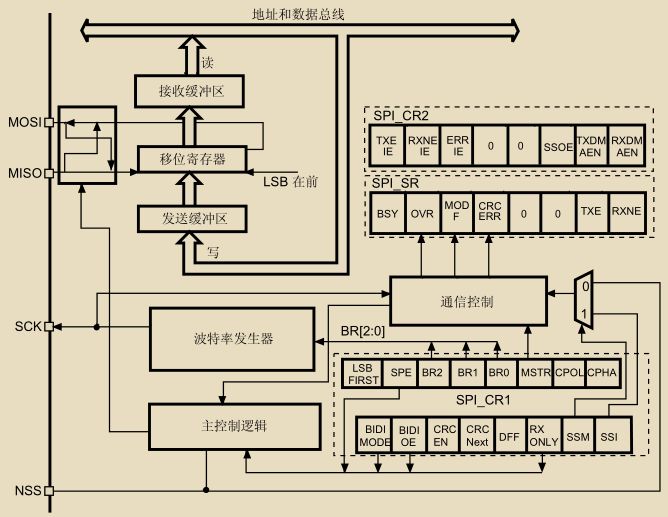
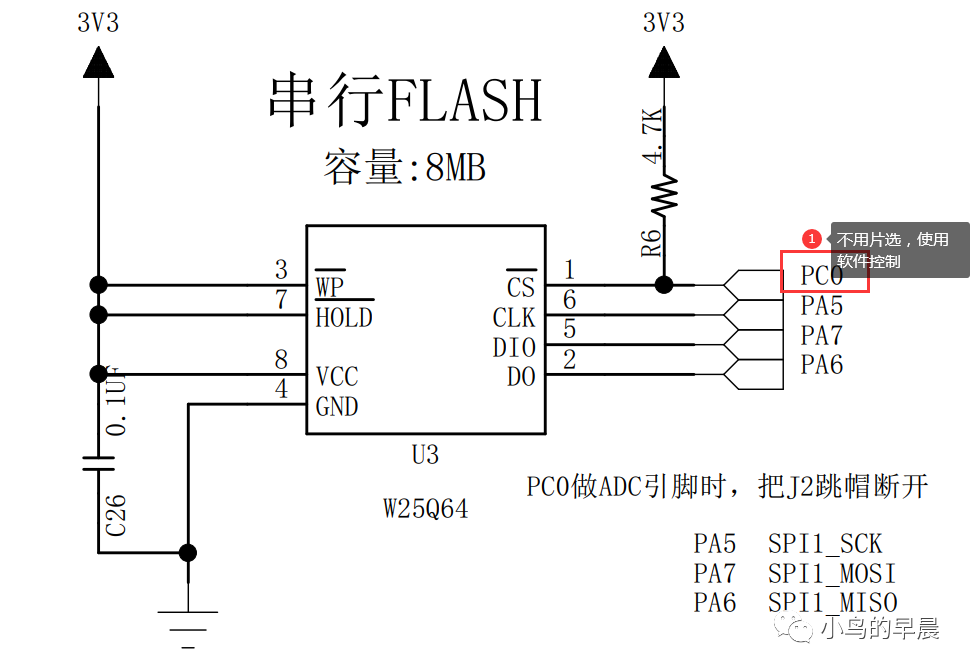
本实例用的是STM32F103VET6平台,它有3个SPI接口(这里使用SPI1),各信号线连接到FLASH(型号:W25X16)的CS,CLK,DO,DIO线,以实现SPI通讯,对FLASH进行读写。
(这里采用主模式,全双工通讯,通过查询发送数据寄存器和接收数据寄存器状态确保通讯正常)
mian函数:
1#define sFLASH_ID 0xEF3015(前面加个1,免得变大)
u32 DeviceID;
u32 FlashID;
int main(void)
{
/115200 8-N-1/
USART1_Config();
SPI_FLASH_Init();
DeviceID = SPI_FLASH_ReadDeviceID();
Delay(200);
FlashID = SPI_FLASH_ReadID();
printf(“\r\n FlashID is 0x%X, Manufacturer Device ID is 0x%X\r\n”,FlashID,DeviceID);
if(FlashID == sFLASH_ID)
{
printf(“\r\n 检测到 flash W25X16 !\r\n”);
SPI_FLASH_SectorErase(FLASH_SectorToErase);
SPI_FLASH_BufferWrite(Tx_Buffer, FLASH_WriteAddress, BufferSize);
printf(“\r\n 写入的数据为:%s \r\t”, Tx_Buffer);
SPI_FLASH_BufferRead(Rx_Buffer, FLASH_ReadAddress, BufferSize);
printf(“\r\n 读出的数据为:%s \r\n”, Tx_Buffer);
TransferStatus1 = Buffercmp(Tx_Buffer, Rx_Buffer, BufferSize);
if( PASSED == TransferStatus1)
{
printf(“\r\n 2M 串行 flash(W25X16)测试成功!\n\r”);
}
else
{
printf(“\r\n 2M 串行 flash(W25X16)测试失败!\n\r”);
}
}
else
{
printf(“\r\n 获取不到 W25X16 ID!\n\r”);
}
SPI_Flash_PowerDown();
while(1);
1234567891011121314151617181920212223242526272829303132333435363738
}
mian函数的流程:
1,调用 USART1_Config() 初始化串口;
2,调用 SPI_FLASH_Init() 初始化SPI模块;
3,调用 SPI_FLASH_ReadDeviceID 读取FLASH器件生产厂商的ID信息;
4,调用 SPI_FLASH_ReadID 读取FLASH器件的设备ID信息;
5,如果读取ID正确,则调用 SPI_FLASH_SectorErase()把FLASH内容擦除,擦除后调用 SPI_FLASH_BufferWrite()向FLASH写入数据,然后再调用 SPI_FLASH_BufferRead()从刚刚写入的地址中读出数据,最后调用 Buffercmp()对写入和读取的数据进行匹配,匹配成功则把标志变量 TransferStatus1赋值为 PASSED(自定义的枚举变量);
6,根据标志量 TransferStatus1判断FLASH数据的:擦除,写入,读取是否正常,分情况输出到终端;
7,如果读取FLASH的ID信息错误,则直接向终端输出检测不到FLASH信息;
8,最后调用 SPI_Flash_PowerDown()函数关闭 FLASH设备的电源(因为数据写入到FLASH后并不会因断电而丢失,所以需要使用的时候再开启FLASH电源);
PS:
读取器件ID信息可以知道设备与主机是否能够正常工作,也便于区分不同的器件,可以在使用的FLASH用户数据手册找到ID表
SPI的初始化:
void SPI_FLASH_Init(void)
{
SPI_InitTypeDef SPI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);
/这里是GPIO初始化部分,将4个引脚都设定好/
/!《 Configure SPI_FLASH_SPI pins: SCK /
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/!《 Configure SPI_FLASH_SPI pins: MISO /
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/!《 Configure SPI_FLASH_SPI pins: MOSI /
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/!《 Configure SPI_FLASH_SPI_CS_PIN pin: SPI_FLASH Card CS pin /
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Deselect the FLASH: Chip Select high */
SPI_FLASH_CS_HIGH(); //不用的时候就拉高
/这里是SPI设置部分/
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 3;
SPI_Init(SPI1, &SPI_InitStructure);
/* Enable SPI1 */
SPI_Cmd(SPI1, ENABLE);
}
GPIO初始化:
根据《STM32数据手册》以及《STM32参考手册》,把PA5(SCK),PA6(MISO),PA7(MOSI)设置成复用推挽输出,因为PA4(NSS)是使用软件模式,所以设置为通用退完输出。
SPI模式初始化:
对于初始化,是需要根据通讯的设备FLASH的SPI特性来决定的,下面成员分析:
SPI_InitStructure.SPI_Direction= SPI_Direction_2Lines_FullDuplex;
这里设置通讯模式,这里设置成全双工模式(可以在keil环境下查找其他模式)
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
这里是设置工作模式,STM32的SPI设备可以gon工作在主机模式(SPI_Mode_Master)或从机模式(SPI_Mode_Slave),这两个模式最大的区别就是SPI的SCK信号线时序,SCK的时序是由通讯中的主机产生的,如果配置成从机模式,STM32的SPI模块将接收外来的SCK信号。(这里STM32作为SPI通讯主机,所以设置成 SPI_Mode_Master)。
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
这个是设置SPI每次通讯的数据大小(称为数据帧)为8位还是16位(从FLASH的数据手册可以查到,这里的FLASH的数据帧大小为8为,所以要把STM32的SPI模块设置相同的)
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;&SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
这两个成员是配置SPI的时钟极性(CPOL)和时钟相位(CPHA),这两个配置影响到SPI的通讯模式,要设置成符合将要互相通讯的设备的要求。
CPOL:可以取 SPI_CPOL_High(SPI 通讯空闲时 SCK 为高电平)或者SPI_CPOL_Low(SPI 通讯空闲时 SCK 为低电平);
CPHA:可以取 SPI_CPHA_1Edge(在 SCK 的奇数边沿采集数据)或者SPI_CPHA_2Edge (在 SCK 的偶数边沿采集数据);
查询这个FLASH的使用手册,可以了解到这个FLASH支持以SPI的模式0和模式3通讯。
模式0:在SPI空闲时,SCK为低电平,奇数边沿采样;
模式3:在SPI空闲时,SCK为高电平,偶数变异采样;
所以这里配置成模式3,把CPOL赋值为SPI_CPOL_High(SPI空闲时SCK为高电平),把CPHA赋值为SPI_CPHA_2Edge(在SCK的偶数边沿超级数据)
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
这里是配置NSS引脚的使用模式,可以选择为硬件模式(SPI_NSS_Hard)与软件模式(SPI_NSS_Soft),在硬件模式中的SPI片选由硬件自动产生,而软件模式则需要手动把相应的FPIO端口拉高或拉低产生非片选和片选信号(如果外界条件允许,硬件模式还会自动将STM32的SPI设置为主机)
这里是由软件产生模式,所以赋值为SPI_NSS_Soft.
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4;
这里是设置波特率分频值,分频后的时钟为SPI的SCK信号线的时钟频率,这个成员可以设置为fpclk的2,4,6,8,32,64,128,256分频。这里设置为4分频
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
所有串行的通讯协议都会有MSB先行(高位数据在前)还是LSB先行(地位数据在前)的问题,STM32的SPI模块可以通过对这个结构体成员,对这个特性编程控制。
根据FLASH的通讯时序,这里设置为MSB先行(SPI_FirstBit_MSB)
SPI_InitStructure.SPI_CRCPolynomial = 3;
这里是设置SPI的CEC校验的多项式,如果使用到CRC校验时,就是用这个成员的参数(多项式),来计算CRC的值。(这里的FLASH不支持CRC校验,所以赋值为3其实没意义)
配置完这些结构体成员后,调用 SPI_Init()把这些参数写入到寄存器中,然后调用SPI_Cmd()使能SPI1外设。
PS:
SPI_FLASH_CS_HIGH()这个实际是上一个自定义的宏:
#define SPI_FLASH_CS_HIGH() GPIO_SetBits(GPIOA, GPIO_Pin_4)
实际上这个宏就是用来把 PA4(NSS)引脚拉高,从而禁止SPI通讯
#define SPI_FLASH_CS_LOW() GPIO_ResetBits(GPIOA, GPIO_Pin_4)
如果要需要使用的时候,就直接拉低就行了这样就可以开始通讯了
控制FLASH的命令:
因为不同的设备,都会相应的有不同的指令,如 EEPROM 中会把第一个数据解释为存储矩阵的地址(实质就是指令)。而 FLASH 则定义了更多的指令,有写指令,读指令,读 ID 指令等等。
这些指令,对主机来说,只是它遵守最基本的通讯协议发送出的数据。但设备把这些数据解释成不同的意义(指令编码),所以才成为指令。在我们配置好 STM32 的协议模块后,想要控制设备,就要遵守相应设备所定义的命令规则。
指 令 表 中 的 A0~A23 指 地 址 ; M0~M7 为 器 件 的 制 造 商 ID(MANUFACTURER ID);D0~D7 为数据。
读取FLASH ID:
在命令列表可以了解到读取设备 ID 的命令(Device ID)编码为 ABh、dummy、dummy、dummy。表示此命令由这四个字节组成,其中dummy意为任意编码,即这几个字节必须发送数据,但这些数据是任意的,命令列表中带括号的字节数据表示由FLASH返回给主机的响应,可以看到Device ID命令的第5个字节为从机返回的响应,(ID7~ID0),即返回设备的ID号。
使用DeviceID命令时的时序图
可以看到主机首先通过MOSI线(即FLASH的DIO线)发送第一个字节为ABh编码,紧接着三个字节的dummy编码,然后FLASH就忽略DIO线上的信号,通过MISO线(即FLASH的DO线)把它的FLASH设备ID发送给主机。
u32 SPI_FLASH_ReadDeviceID(void)
{
u32 Temp = 0;
/使用的时候就拉低/
SPI_FLASH_CS_LOW();
/* Send “RDID ” instruction */
SPI_FLASH_SendByte(W25X_DeviceID);
SPI_FLASH_SendByte(Dummy_Byte);
SPI_FLASH_SendByte(Dummy_Byte);
SPI_FLASH_SendByte(Dummy_Byte);
/* Read a byte from the FLASH */
Temp = SPI_FLASH_SendByte(Dummy_Byte);
/* Deselect the FLASH: Chip Select high */
SPI_FLASH_CS_HIGH();
return Temp;
}
SPI_FLASH_CS_LOW();
把片选拉低,开始通讯
SPI_FLASH_SendByte(W25X_DeviceID);
向FLASH发送一个命令字节编码:W25X_DeviceID (这里定义的宏为:0XAB)
SPI_FLASH_SendByte(Dummy_Byte);
根据指令表,发送完指令后,后面要接着发送三个字节的dummy_Byte(这里宏定义为:0xff,设置为其他也无所谓)
Temp = SPI_FLASH_SendByte(Dummy_Byte);
在前面发送完三个字节的 Dummy_Byte后,在第五个字节,FLASH通过DIO端口输出它的器件ID,所以这里再调用一次SPI_FLASH_SendByte(Dummy_Byte)接收返回值,赋值给Temp.
SPI_FLASH_CS_HIGH();
把片选拉高,结束通讯
这样就完成了读取FLASH ID,这里有一个相对底层的函数SPI_FLASH_SendByte(),它实现了利用SPI发送和接收数据的功能
u8 SPI_FLASH_SendByte(u8 byte)
{
/等待发送数据寄存器清空/
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET);
/发送数据/
SPI_I2S_SendData(SPI1, byte);
/等待接收数据寄存器为非空/
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET);
/返回接收到的数值/
return SPI_I2S_ReceiveData(SPI1);
}
流程:
1,调用库函数 SPI_I2S_GetFlagStatus()等待发送数据寄存器清空;
2,发送数据寄存器准备好后,调用库函数SPI_I2S_SendData()向从机发送数据;
3,调用库函数SPI_I2S_GetFlagStatus()等待接收数据寄存器非空;
4,接收寄存器非空时,调用SPI_I2S_ReceiveData()获取接收寄存器中的数据并作为函数的返回值,这个数据即由从机发送给主机的数据;
这是最底层的发送数据和接收数据的函数,利用了库函数的标志检测确保通讯正常。
读取厂商ID:
u8 SPI_FLASH_ReadID(void)
{
u32 Temp = 0, Temp0 = 0, Temp1 = 0, Temp2 = 0;
SPI_FLASH_CS_LOW();//拉低开始通讯
SPI_FLASH_SendByte(W25x_JedecDeviceID);
Temp0 = SPI_FLASH_SendByte(Dummy_Byte);
Temp1 = SPI_FLASH_SendByte(Dummy_Byte);
Temp2 = SPI_FLASH_SendByte(Dummy_Byte);
Temp = (Temp0 《《 16) | (Temp1 《《 8) | (Temp2);
SPI_FLASH_CS_HIGH();
return Temp;
123456789101112131415
}
这个函数和之前的读取设备ID流程也是类型的,差别在于发送一个字节的命令编码JEDEC ID(9Fh)之后,从机就通过D0线返回厂商ID以及0~16位的设备ID。
读厂商ID时序图
擦除FLASH内容:
扇区擦除(根据FLASH的储存原理,在写入数据前,要先对存储区域进行擦除,也叫预写)
void SPI_FLASH_SectorErase(u32 SectorAddr)
{
/写使能并且判断FLASH状态/
SPI_FLASH_WriteEnable();
/*这里开始是FLASH擦除操作*/
SPI_FLASH_CS_LOW();
SPI_FLASH_SendByte(W25X_SectorErase);
/*这里是擦除一个扇区,也就是4KB*/
SPI_FLASH_SendByte((SectorAddr & 0xFF0000) 》》 16);
SPI_FLASH_SendByte((SectorAddr & 0xFF00) 》》 8);
SPI_FLASH_SendByte(SectorAddr & 0xFF);
SPI_FLASH_CS_HIGH();
/*再次判断FLASH状态确保可以执行下一次操作*/
SPI_FLASH_WaitForWriteEnd();
1234567891011121314
}
这是扇区擦除时序,其中的第一个字节为扇区擦除命令编码(20h),紧跟其后的为要进行擦除的,根据FLASH的说明,整个存储矩阵分为块区和扇区,每块(Block)的大小为64KB,每个扇区(Sector)的大小为4KB,对存储矩阵进行擦除时,最小的单位为扇区。
写使能:
void SPI_FLASH_WriteEnable(void)
{
SPI_FLASH_CS_LOW();
SPI_FLASH_SendByte(W25X_WriteEnable);
SPI_FLASH_CS_HIGH();
123
}
这里根据写使能命令时序,只要发送命令WriteEnable(06h)就行了。
读FLASH状态:
在擦除操作之前,需要调用SPI_FLASH_WaitForWriteEnd()来确保FLASH不忙碌的时候,才发送命令或者数据,通过读取FLASH的状态寄存器来获知他的工作状态。
void SPI_FLASH_WaitForWriteEnd(void)
{
u8 FLASH_Status = 0;
SPI_FLASH_CS_LOW();
SPI_FLASH_SendByte(W25X_ReadStatusReg);
/*一直检测FLASH状态寄存器状态,直到Bit0位(BUSY位)为0)*/
do
{
FLASH_Status = SPI_FLASH_SendByte(Dummy_Byte);
}while((FLASH_Status & WIP_Flag) == SET);
SPI_FLASH_CS_HIGH();
12345678910
}
整个函数实质是不断的循环检测FLASH状态寄存器的Busy位,知道FLASH的内部写时序完成,从而确保下一通讯操作正常。主机通过发送读状态寄存器命令Read Status Register(05h 编码),返回的为他的8为状态寄存的值。
检测FLASH的状态寄存器的Bit0(BUSY位),当FLASH在执行内部写时序的时候,除了读状态寄存器命令,其他的一切命令他都会忽略,并且BUSY位保持为1,所以我们需要等待BUSY位为0的时候,再向FLASH发送其他命令。
向FLASH写入数据:
对FLASH写入数据,最小单位是256字节,厂商把这个单位曾为页。写入时,一般也只有页写入的方式,所以为了方便的把一个很长的数据写入到FLASH时,一般需要进行转换,把数据按页分好,再写入到FLASH中(类似于I2C对EEPROM的页写入,只是页的大小不同而已)。
void SPI_FLASH_BufferWrite(u8* pBuffer, u32 WriteAddr, u16 NumByteToWrite)
{
u8 NumOfPage = 0, NumOfSingle = 0, Addr = 0, count = 0, temp= 0;
/这里划分好数据需要写多少页,写地址,写大小/
Addr = WriteAddr % SPI_FLASH_PageSize;
count = SPI_FLASH_PageSize - Addr;
NumOfPage = NumByteToWrite / SPI_FLASH_PageSize;
NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize;
if (Addr == 0)
{
if(NumOfPage == 0)
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumByteToWrite);
}
else
{
while(NumOfPage--)
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, SPI_FLASH_PageSize);
WriteAddr += SPI_FLASH_PageSize;
pBuffer += SPI_FLASH_PageSize;
}
SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumOfSingle);
}
}
else
{
if(NumOfPage == 0)
{
if(NumOfSingle 》 count)
{
temp = NumOfSingle - count;
SPI_FLASH_PageWrite(pBuffer, WriteAddr, count);
WriteAddr += count;
pBuffer += count;
SPI_FLASH_PageWrite(pBuffer, WriteAddr, temp);
}
else
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumByteToWrite)
}
}
else
{
NumByteToWrite -= count;
NumOfPage = NumByteToWrite / SPI_FLASH_PageSize;
NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize;
SPI_FLASH_PageWrite(pBuffer, WriteAddr, count);
WriteAddr += count;
pBuffer += count;
while (NumOfPage--)
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, SPI_FLASH_PageS
WriteAddr += SPI_FLASH_PageSize;
pBuffer += SPI_FLASH_PageSize;
}
if(NumOfSingle != 0)
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumOfSingle);
}
}
}
1234567891011121314151617181920212223242526272829303132333435363738394041424344454647484950515253545556
}
对数组进行分页后,就调用SPI_FLASH_PageWrite()对数据进行按页写入(是不是和I2C写入EEPROM的写函数一样(连行数都差不多-_-!),不了解的话可以去看之前的I2C部分)
底层写操作:SPI_FLASH_PageWrite()
void SPI_FLASH_PageWrite(u8* pBuffer, u32 WriteAddr, u16 NumByteToWrite)
{
/写使能/
SPI_FLASH_WriteEnable();
/拉低开始通讯/
SPI_FLASH_CS_LOW();
/发送PageProgram(02h))/
SPI_FLASH_SendByte(W25X_PageProgram);
/* Send WriteAddr high nibble address byte to write to */
SPI_FLASH_SendByte((WriteAddr & 0xFF0000) 》》 16);
/* Send WriteAddr medium nibble address byte to write to */
SPI_FLASH_SendByte((WriteAddr & 0xFF00) 》》 8);
/* Send WriteAddr low nibble address byte to write to */
SPI_FLASH_SendByte(WriteAddr & 0xFF);
/这里是判断写大小是否符合FLASH规定的256/
if(NumByteToWrite 》 SPI_FLASH_PerWritePageSize)
{
NumByteToWrite = SPI_FLASH_PerWritePageSize;
//printf(“\n\r Err: SPI_FLASH_PageWrite too large!”);
}
/这里才是写真是数据/
while (NumByteToWrite–)
{
/* Send the current byte */
SPI_FLASH_SendByte(*pBuffer);
/* Point on the next byte to be written */
pBuffer++;
}
/* Deselect the FLASH: Chip Select high */
SPI_FLASH_CS_HIGH();
/* Wait the end of Flash writing */
SPI_FLASH_WaitForWriteEnd();
}
发送完写入命令Page Program(编码 02h)及地址之后,可以连续写入最多256个字节的数据(SPI_FLASH_PerWritePageSize = 256),在发送完数据之后,记得调用SPI_FLASH_WaitForWriteEnd()等待FLASH内部写时序完成再推出函数。
从FLASH读取数据:
对于读取数据,发送一个命令后,可以无限制的一直把整个FLASH的数据都读取完,直到读取的数据量足够了,就拉高片选信号以表示读取数据结束。
void SPI_FLASH_BufferRead(u8* pBuffer, u32 ReadAddr, u16 NumByteToRead)
{
SPI_FLASH_CS_LOW();
SPI_FLASH_SendByte(W25X_ReadData);
/* Send ReadAddr high nibble address byte to read from */
SPI_FLASH_SendByte((ReadAddr & 0xFF0000) 》》 16);
/* Send ReadAddr medium nibble address byte to read from */
SPI_FLASH_SendByte((ReadAddr& 0xFF00) 》》 8);
/* Send ReadAddr low nibble address byte to read from */
SPI_FLASH_SendByte(ReadAddr & 0xFF);
while (NumByteToRead–)
{
/* Read a byte from the FLASH */
*pBuffer = SPI_FLASH_SendByte(Dummy_Byte);
/* Point to the next location where the byte read will be saved*/
pBuffer++;
}
/* Deselect the FLASH: Chip Select high */
SPI_FLASH_CS_HIGH();
}
首先发送一个读取数据命令 Read Data(03h),接着发送24位读数据起始地址,STM32再通过D0线接收数据,并使用指针的方式记录起来
-
FlaSh
+关注
关注
10文章
1549浏览量
146643 -
SPI
+关注
关注
17文章
1614浏览量
89586
发布评论请先 登录
相关推荐
STM32F207擦除片内FLASH,退出DEBUG无法执行下一步程序是怎么回事?
FATFS对SPI_FLASH新建文件、删除文件或者修改文件后电脑无法识别,为什么?
STM32F407ZGT6 spi flash片选引脚无法被拉低的原因?怎么解决?
stm32 flash写数据怎么存储的
STM32的Flash写了保护怎么办?STM32如何设置读保护和解除读保护?
STM32F767ZGT6连续调用两次rt_spi_transfer读取同一个地址,第二次读取的时反馈之异常变为0怎么解决?
STM32 SPI基础内容

应用笔记 | 关闭SPI会导致WRPERR错误的问题分析

STM32的SPI控制器实现SPI
基于FPGA的SPI Flash控制器的设计方案

STM32CubeMx入门教程(6):SPI读写FLAH的应用





 工商网监
工商网监
评论