 巡边机器人详细制作教程
巡边机器人详细制作教程
本项目介绍的是一个既简单又有趣的巡边机器人,即可以自主的沿着墙壁的边缘行走,这和老鼠的行为很像,为此再加上专门的造型设计,俨然一只在黑暗中偷偷摸摸的狡猾老鼠。通常要实现类似沿墙走的功能,往往需要红外线或者超声波等之类较为高级的传感器,且还要加上复杂的控制电路,而本项目却是用简单到仅有几个开关就能实现同样的效果,可以说是非常值得推荐的一个项目。
本项目机器人有两个版本,A版的体型比较苗条,外形更像老鼠,不过由于受到结构的限制,其只能过外侧的拐角而不能过内侧的拐角(即可以围绕方形盒子外侧跑而不能在内部转),且过外侧拐角还会有点迟钝,视频中可以看到其转到四个角的时候会有一个缓慢的转弯过程,不过倒是很像老鼠在转过角落时探出头先观察一下情况再继续跑一样,名副其实一只狡猾的老鼠;B版的体型比较圆润,虽然看起来肥肥胖胖的,但它却是非常的灵活,不但可以快速过外侧的拐角,而且还能顺畅过内侧的拐角,跑起来非常迅速。
基本原理:
本项目采用的是与 PVCBOT-7号 类似的三轮传动结构,不过是其的反向应用,即两个主动轮作为后轮,一个传动轮作为前轮,就相当于倒着开的三轮小车。
运动方式:
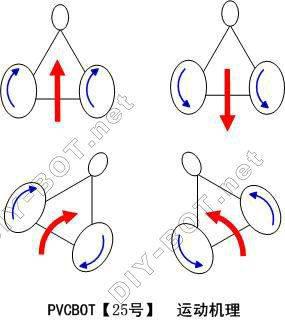
本项目机器人的运动机理与 PVCBOT-1号——运动机理 类似,不同是原来的前进变为后退,原来的后退变为前进,而左右拐弯的原理则基本不变。
控制前面两个轮子的转动方向就可以控制整个机器人行进的方向:
1、左右两个后轮都向前转,则机器人向“正前方”直线前进;
2、左右两个后轮都向后转,则机器人向“正后方”直线倒退;
3、左后轮向前转,右后轮向后转(或不转),则机器人将以前轮为轴心顺时针转动,即实现向“右前方”转弯前进;
4、右后轮向前转,左后轮向后转(或不转),则机器人将以前轮为轴心逆时针转动,即实现向“左前方”转弯倒退。
驱动机理:
在机器人的一侧前端用钢丝做了一根触须,通过触须感应是否挨着墙壁,假如远离墙壁则控制整体往墙壁靠,假如过于靠近墙壁则控制整体离开墙壁,让整体出于“远离-靠近—再远离—再靠近。。。”的动态平衡中,就可以沿着墙壁的走向一直前进。
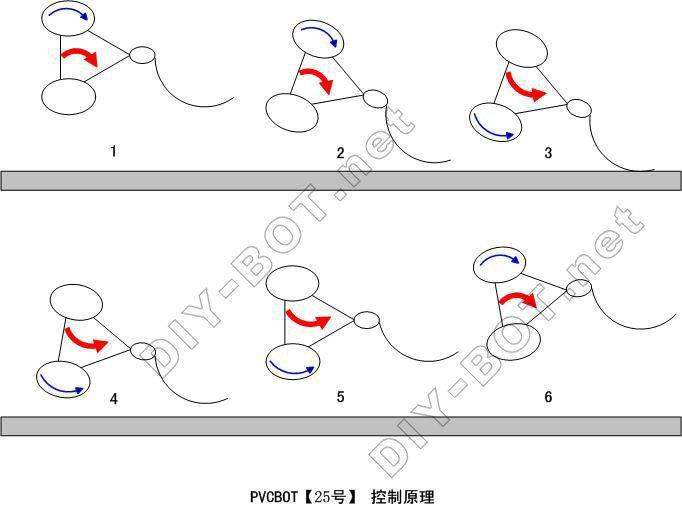
按照上图前进的方向,我们把墙外侧的后轮称为左后轮,把靠近墙内侧的后轮称为右后轮,则:
1)默认状态下,远离墙壁,触须不触发,左后轮转动,右后轮不转动,则整体往墙内侧转向前进;
2)整体继续往墙内侧转向前进;
3)当足够靠近墙壁时,触须碰到墙壁触发,左后轮不转动,右后轮转动,则整体往墙外侧转向前进,即让整体不至于过于靠近墙壁,而是向墙外侧转出;
4)由于触须是机械式的触发,有一定的惯性,即在整体已经转向墙外侧的时候,触须的触发不会马上释放,而是会有一定的延时,也就是让整体向墙外侧转出的过程会持续一定的时间;
5)整体继续向墙外侧转出;
6)当远离墙到一定程度时,触须的触发释放,左后轮重新转动,右后路停止转动,则整体开始往墙内侧再转向前进,即重新回到以上第1步,由此循环往复。。。
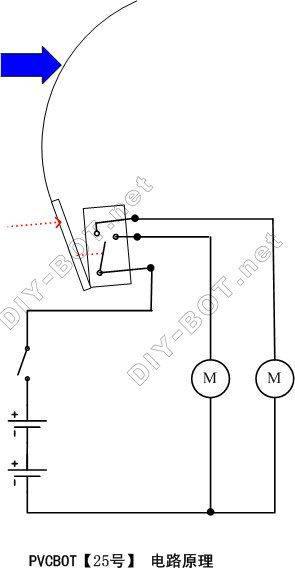
电路原理:
本项目的电路非常简单,由一个最基本的电学电路组成。
1、机器人的动力是由两个直流电机提供的,众所周知,直流电机的两个电极连接直流电源,接通电源则电机转动前进;
2、电源为两节7号电池组成的电池组,电池组同一时间只为其中一个电机供电。如果身体往墙内侧转则是驱动外侧的轮子转动,而身体往墙外侧转则是驱动内侧轮子转动。
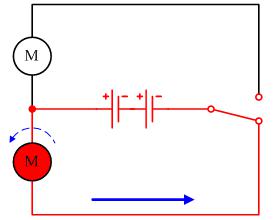
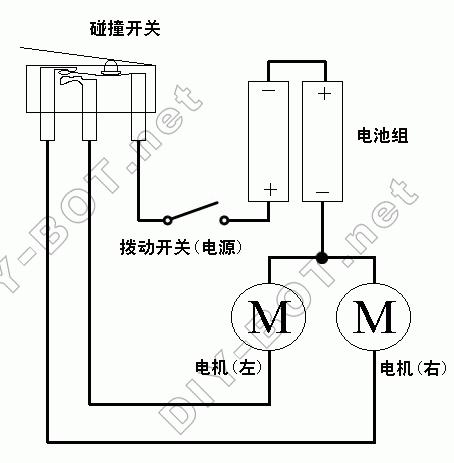
3、通过三引脚的碰撞开关,可以控制电池组为哪一个电机进行供电,而碰撞开关则连接触须,触须被挤压则碰撞开关被触发。 下图为控制原理。
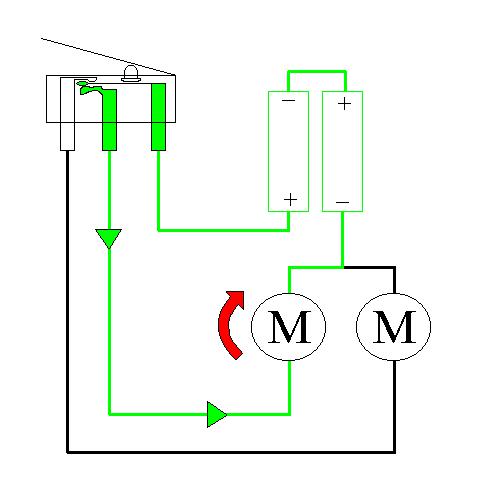
4、机器人头部有一根钢丝作的触须,触须分别连接在碰撞开关上。
(1)没有靠着墙壁时,触须没有被挤压,不触发碰撞开关,碰撞开关默认的通路,给外侧的电机供电,外侧电机转动而内侧电机不转动,则身体转向往内侧墙上靠并前进;
(2)碰到墙壁时,触须被挤压,触发碰撞开关,碰撞开关断开默认通路,连接另外的一组通路,给内侧电机供电,内侧电机转动而外侧电机不转,则身体转向墙外侧并前进;
(3)身体转向墙外侧前进一定距离,触须离开墙壁,转回以上第一步循环往复……
完整的电路原理图:
实物电路接线图供参考。
本项目以 PVCBOT-A型 平台车为基础,以杜邦线和排针为主要连接方式, 以下为电路焊接示意图。

准备工作:
本项目需要的器材主要包括:PVC线槽、PVCBOT-A型基础平台小车、碰撞开关、拨动开关、螺丝、排针等。
制作过程:
1.传感器
2.开关
3.电源
本项目机器人用两节7号电池供电,可以是普通的7号干电池(1.5V/节)或镍氢/镍镉充电电池(1.2V/节),也可以是7号锂电池(3.5V/节)。
4.装饰:
电路:
按照电路原理图和焊接示意图,把电路的各部分焊接起来。
其中,电机是通过杜邦线插接到电路板的排针上与整个电路相连的,要注意核对电路图不要弄错了。
把电机的杜邦线也插接到电路板上的排针上,并打开拨动开关进行测试。
正常情况下:
1)触须不触发时,靠着触须一侧的电机是不转动的,而另一侧的电机是转动的,且转动的方向是向前的;
2)触须触发时,靠着触须一侧的电机转动,且转动的方向也是向前的,而另一侧的电机停止。
假如出现异常情况:
1)两侧的电机转停的状态相反了(如:该它转的它停了),则调换两个电机所插接的排针;
2)某一电机转的方向反了(如:该往前转的它往后转了),则只要把该电机的两根杜邦线调换过来插到排针上。
调试:
把机器人放到墙壁旁,让触须的一侧靠近墙壁,打开拨动开关。
正常情况下:
1)默认的时候,远离墙壁的一侧轮子会向前转动(另一侧轮子不转),头部会转向墙壁内侧,整体会靠向墙壁前进;
2)当靠向墙壁足够近时,触须会碰到墙壁触发,然后靠近墙壁的一侧的轮子会向前转动(另一侧轮子停止),头部会反过来转向墙壁外侧,整体会远离墙壁前进;
3)当远离墙壁一定距离时,触须释放,远离墙壁的一侧轮子会重新转动,再次回到前面第一步的情况,如此循环往复,让机器人在“靠近——远离——再靠近——再远离”的状态间切换实现动态平衡,也就是实现了沿着墙壁边缘走的效果。
注意检查:
默认触须没有触发时,没有触须的一侧后轮是转动的,且是向前转动的(让小车向前往另一侧转向并前进);触发触须后,有触须的一侧后轮是转动的,且是向前转动的(让小车向前往另一侧转向并前进);
(1)假如默认是有触须的一侧轮子是转动的,则要把两个电机的杜邦线对应插的排针调换过来重插,即让两个后轮电机的控制顺序调换过来;
(2)假如轮子没有向前转动,则把该轮子对应电机的两根杜邦线调换过来插到排针上,即让电机的电极电流方向调换过来。
常见的问题:
1)原地打转,并且转向有触须的一侧(视频中有该情形),则是正常的,只要让机器人有触须的一侧靠近墙壁,让触须能够转到碰到墙壁即可;
2)触须碰到墙壁但是无法触发,则用尖嘴钳把触须再向外侧弯折调整一下,或者重新按照前面关于传感器部分的制作过程进行检查;假如是头部卡住触须导致无法触发的,可以把头部向下弯折的幅度调小一些。
3)靠近墙壁一侧的后轮擦到墙壁,导致卡住动不了,则用尖嘴钳把触须向外弯折,让触须可以在靠向墙壁时早一点触发。
关于内侧拐角的巡边:
前面我们提过,本项目的B版机器人由于比A版在体型结构上的更完善,所以B版可以走A版无法走得过的内侧拐角。之所以如此,主要是:
1)B版体型比较圆润,没有那么多的菱角,不容易被周边墙壁或者障碍物卡住;
2)A版的触须有点短,且从头部前端引出,触发相对迟钝一些;而B版的触须是从身侧引出,并且比较长,触发的灵敏度更高一些。
注意:要想让B版要真正能过内侧拐角,需要在角落上放置一个小圆柱(下图蓝色),我们这里是直接放上圆柱形的1号干电池(见视频),也就是让角落更圆滑一点,这样B版在拐弯时不至于卡在里面。
假如过弯道不是很顺畅,可以适当调整触须的弯曲程度。
-
机器人
+关注
关注
206文章
26964浏览量
201282
发布评论请先 登录
相关推荐
机器人制作资料宝典【日本顶尖机器人设计师经典教材】
分享 《机器人制作天空宝典》,OHM 自律型机器人制作
循线音乐百灵鸟机器人--鸥鹏机器人制作
高速巡线机器人 精选资料分享
舞蹈机器人的详细制作流程讲解





 工商网监
工商网监
评论