 采用LPC2132控制步进电机实现康复机器人系统的设计
采用LPC2132控制步进电机实现康复机器人系统的设计
引言
LPC2132 是基于一个支持实时防真的嵌入式跟踪的32/16 位ARM7TDMI-STM CPU 的微控制器,并带有32 KB,64 KB,512 KB的嵌入的高速FLASH存储器。其内部有1 个10 位8 路A/D 转换器可用于采集传感器信号,并具有建立在标准定时器0/1之上的脉宽调制器,用于对步进电机的控制。步进电机作为数字化元件,与LPC2132相结合,可以达到精确控制。
1 步进电机的特性
步进电机是一种用电脉冲信号进行控制的电动机,它将脉冲信号转变成角位移,因此非常适合于单片机控制。步进电机的角位移或线位移量与电脉冲个数成正比,它的转速或线速度与电脉冲频率成正比,在负载能力范围内这些关系不因电源电压、负载大小、环境条件的波动而变化。通过改变脉冲频率的高低可以在很大范围内实现步进电机的调速,并能进行快速启动、制动和反转。
本设计针对目前各个领域对自动化的需要,采用LPC2132处理器与步进电机结合,并将其应用于康复机器人领域,能够极大的减轻医师的劳动强度,提高对患者的治疗效率。
2 LPC2132 控制芯片的主要功能及应用
(1)LPC2132 芯片当中具有建立在标准定时器0/1上的脉宽调试器(PWM)。通过设置不同的匹配寄存器,可以独立的控制上升沿和下降沿的位置,进而可以控制多相位电机。
(2)具有一个逐次逼近的A/D转换器。其中8个管脚复用为输入脚,可将从角度传感器和力传感器获得的模拟量转化为数字量并进行处理。
(3)具有异步串行口。可以与计算机进行实时信息交互。
3 控制系统方案设计
3.1 系统控制原理
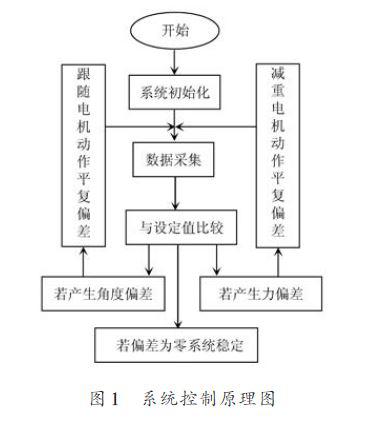
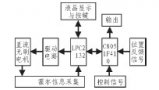
由于脑卒中患者腿部不具有正常的支撑能力,所以在康复训练的时候,需要对患者进行减重[7-8].减重控制平台搭建在下肢外骨骼康复训练平台的上方,它通过吊绳(含力传感器)和马甲与患者相连,并且可以跟随患者在设定的轨道上移动,能够实时的对患者进行恒力减重。正常情况下,减重平台在患者的正上方,吊绳与减重平台是垂直的,当患者在康复机器人训练平台上进行康复行走训练时,会带动吊绳偏离竖直方向。角度传感器检测出这个角度,驱动偏移电机动作,从而平复这个角度。控制原理图如图1所示。
3.2 总体结构设计
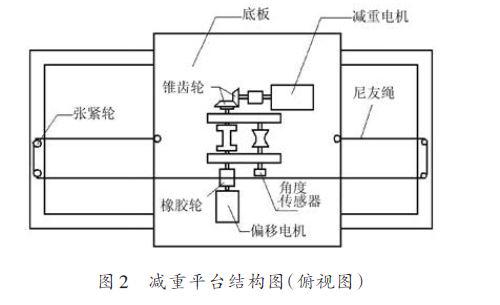
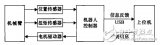
减重平台上有两个步进电机,分别为偏移电机和减重电机。偏移电机上连有尼龙绳,尼龙绳连接在减重平台的两端,从而带动减重平台左右移动。而减重电机通过一对锥齿轮连接到滚筒上,通过控制滚筒上绳子的收放来调节绳子的张力,以实现减重。
减重平台的结构俯视图如图2所示。
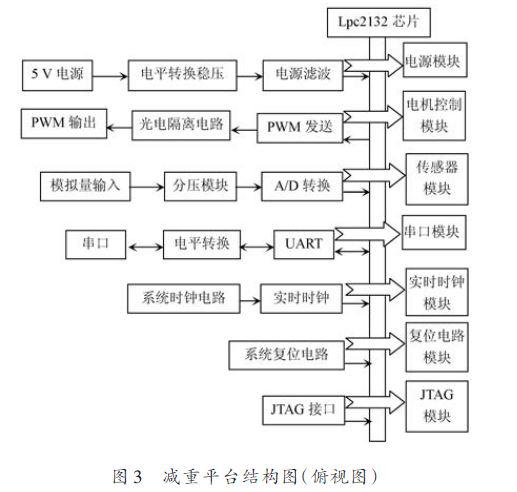
减重控制平台采用双闭环控制,分别为力闭环控制和角度闭环控制。主控芯片采用Phlips 公司的LPC2132 芯片配备外围控制电路模块如图3 所示。
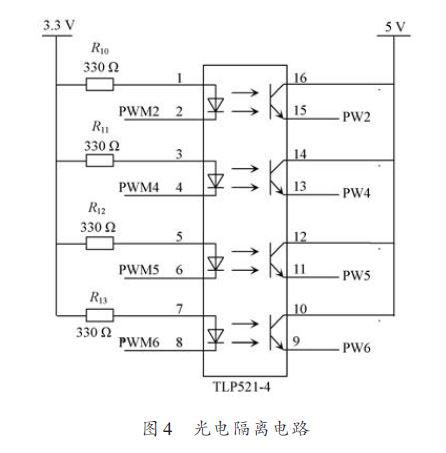
为了消除外接电路的干扰,采用光电耦合电路,将核心控制电路和驱动器电路隔离开来,避免外接电路干扰或破坏核心控制电路[10].本设计选择了TOSHIBA公司的TLP521-4光电耦合芯片。光电隔离电路如图4所示,左侧PWM 作为输入断与芯片的管脚相连,右侧PW 作为输出端与步进电机驱动器相连。
3.4 软件设计
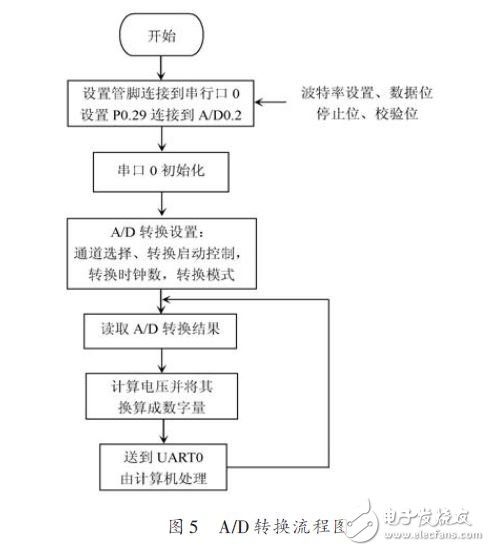
(1)控制系统需要实时的处理拉力传感器和角度传感器采集的信号,并将这些模拟量通过A/D模块转化成数字量。以角度传感器为例,本系统选用的角度传感器是将旋转的角度转换成动态的电压。
如图5为A/D转换流程图,由于控制芯片满额度电压为3.3 V,且转换精度为10 位,即2^10=1 024 级,若从A/D转换寄存器中读到的电压值为V,则实际电压U 为:
(2)要想使步进电机能够运转,需要控制系统提供相应的脉冲信号。通过设置LPC2132芯片中的不同匹配寄存器来获得相应的脉冲信号。通过设置不同的脉冲频率来控制步进电机的转速。软件用C语言编写并在ADS开发环境中完成,将编写好的程序转换成Hex文件,将文件导入到Protues软件当中进行仿真。如图6所示。
(3)通过设置串口,可以与计算机进行实时交互。
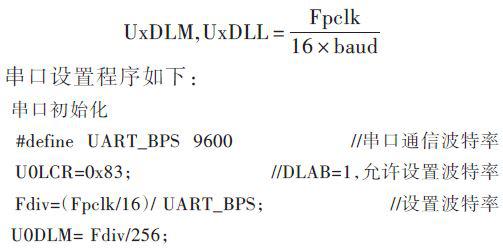
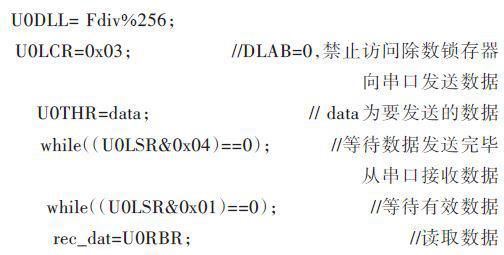
LPC2132 具有2 个异步串行口,分别为UART0 和UART1.在串口初始化的时候,必须设置除数锁存器,它保存了用于产生波特率时钟的VPB 时钟分频值,波特率时钟必须是波特率的16倍,计算公式如下:
软件部分需要划分不同的程序模块,包括串口程序,信息采集程序,脉冲调试程序。本软件的编写在适合ARM 芯片的ADS开发环境中进行,并用汇编语言作为启动代码,各程序模块用C语言进行编程。为了消除系统误差,增加系统的响应速度,提高系统的控制精度,本系统引进了PID算法,以实现对系统的闭环控制。
4 结语
本设计以下肢外骨骼康复机器人为研究背景,从工程实际出发,设计了一种康复机器人减重平台。通过LPC2132控制步进电机,实现力闭环和角度闭环双闭环控制。达到对患者的实时跟随,并且恒力减重功能。从而减少了康复医师的劳动强度,提高了患者康复训练的效率。
-
嵌入式
+关注
关注
4981文章
18271浏览量
288290 -
机器人
+关注
关注
206文章
27015浏览量
201360 -
步进电机
+关注
关注
149文章
2929浏览量
146043
发布评论请先 登录
相关推荐
请问两片lpc2132通过i2c怎么通讯
【LinkIt 7687申请】手跟踪式康复机器人系统
STM32的医疗康复机器人手臂控制系统
如何采用LPC2132实现智能防窃电系统的设计?
基于LPC2132的MRI病床控制系统中的COS-II应用设
基于LPC2132的智能防窃电系统的设计

一种基于STM32的力反馈型康复机器人控制系统设计
上肢康复机器人现状及研究分析
康复机器人行业产业链全景梳理及区域热力地图






 工商网监
工商网监
评论