 直角坐标机器人的结构组成及在铝锭搬运中的应用
直角坐标机器人的结构组成及在铝锭搬运中的应用
直角坐标机器人概念:工业应用中,能够实现自动控制的、可重复编程的、多功能的、多自由度的、运动自由度间成空间直角关系、多用途的操作机。他能够搬运物体、操作工具,以完成各种作业。关于机器人的定义随着科技的不断发展,在不断的完善,直角坐标机器人作为机器人的一种,其含义也在不断的完善中。
本文就主要介绍直角坐标机器人在铝锭搬运中的应用。
在以前的铝锭生产中,铝锭的搬运和码垛一直是制约铝锭产量的难题和瓶颈,由于国内制造的传统机械手一般都采用液压驱动,强制定位,所以正个搬运过程中冲击非常大,定位也不准确,经常掉锭,铝垛也码不整齐,导致最后没有办法打包。所以工厂不得不配备几名工人,捡漏拾遗,工人的劳动强度非常大,而且还影响了整个生产的效率和产量。而目前国外的铝锭搬运和码垛全部是采用六自由度的悬臂式机械手,这种设备非常昂贵,一台22T/H的铝锭生产线机械手价格高达300多万元,而在国内这样的一条生产线也只买200万元。因此开发出一种价格便宜,自动化程度高的搬运机器人成了众多冶金设备企业和铝业公司的迫切希望。
要求:按层码垛
运动空间为三维,四自由度运动。
行程:X方向2200mm, Y方向1500mm, Z方向1200mm, 水平旋转:+-900
能够和生产线融为一体,有良好的通讯。
最大负载重量为150Kg,额定负载125Kg.层与层间成90度角交叉排放。
每垛共九层,垛高1000mm.
最快码垛速度为1000mm/s,平均速度为500mm/s.
码垛精度:1mm
根据以上要求,我们设计了一台四坐标机器人。介绍如下:
机器人组成:
该机器人由安装架、机器人定位系统、伺服驱动系统、供胶系统及涂胶枪、控制系统及电控配电系统、安全防护装置等组成。
1、机器人安装架
因为该机器人码垛机的运动速度很快,起停状态对安装架有很大的冲击。安装架必须有非常好的刚性才能保证机器人运行的稳定。
我们为此设计了焊接钢架结构作为支撑架。又因为铝厂有较大的灰尘水气,我们在机器人的上部分设计了铝架结构,并用玻璃罩将机器人罩住。使用铝型材的好处是重量轻。
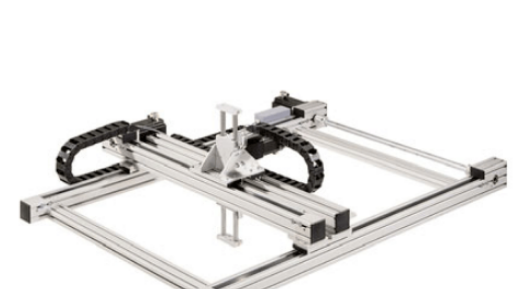
2、机器人定位系统
机器人定位系统是整台设备的核心,为德国NCF公司产品,运动速度快,而重复精度比较高高, X,Y,Z三坐标均选择为同步齿形带传动,单坐标重复定位精度为0.05mm,最快直线运动速度:1000mm/s.其中X坐标轴为两根长度为 3000mm,跨度为2200mm的定位系统,由同步传输器保证两根定位系统运动的同步,由一台3000W伺服电机驱动。出于驱动扭矩及惯量的匹配,需要配一台行星减速机。
Y轴选用双定位系统,之所以选者如此大截面的定位单元,主要是因为Y轴为双端支撑,中间悬空结构,如果选择的截面不够,将不能保证机器人运动的平稳性,机器人在高速运动时将发生振颤。两根定位单元并排使用,将Z轴夹在中间,能够很好的平衡负载,这种安装方式具有非常好的稳定性。两根定位系统由一台2500W伺服电机驱动,出于驱动扭矩及惯量的匹配,需要配一台行星减速机。
Z轴定位系统牢固稳定。该产品一般滑块固定而定位体作伸缩式运动,驱动定位体的伺服电机驱动和滑块安装在一起。该伺服电机因需要将物体快速提升,需要克服很大的重力和加速力,需要较大的功率才可以。
实际应用中我们选择了一台4000W带抱闸的伺服电机,匹配了一台一台行星减速机。
旋转轴与Z轴是集成在一起的,通过在Z轴定位体中心添加一根贯穿的长轴实现的。长轴的最上端作为驱动端,与伺服电机安装在一起。
长轴的最下端作为负载端,用于安装物体。因物体较重,转动惯量较大,不能直接安装在驱动轴,必须加一台盘式减速机才能匹配。伺服电机的动力先由长轴传输到减速机再传输到负载,就实现了旋转负载的功能。
3、伺服驱动系统
伺服驱动系统(Servo System)简称伺服系统,是一种以机械位置或角度作为控制对象的自动控制系统,例如数控机床等。使用在伺服系统中的驱动电机要求具有响应速度快、定位准确、转动惯量 .转动惯量反映了系统的加速度特性,在选择伺服电机时,系统的转动惯量不能大于电机转动惯量的3倍。)较大等特点,这类专用的电机称为伺服电机。当然,其基本工作原理和普通的交直流电机没有什么不同。该类电机的专用驱动单元称为伺服驱动单元,有时简称为伺服,一般其内部包括电流、速度和/或位置闭环。
该码垛机器人的选用具有Profibus 功能的伺服电机。每个运动轴配有一台伺服电机及一台减速机,四个运动轴,共四套伺服电机和四台减速机,其中垂直运动轴为带抱闸伺服电机。
4、机器抓手
该机械手选用德国菲施托气动机械手,压力可调,配备压力缓冲阀,使夹持动作平稳抓手上装有感应机构,能够自动感知物体,并通知控制中心进行物体抓放。
5、控制系统
控制系统由大型PLC、触摸屏组成。该系统拥有强大的Profibus通讯功能。能够将数据实时传输给以太网,能够将控制指令以总线的方式发送给伺服系统,使整个的运动相当流畅。该系统可预置多种工件的程序,更换品种时可在触摸屏上调用相应程序。
6、安全防护装置
该机具有故障提示及报警功能,并且每次出现故障时都能准确的反映出故障具体位置,便于迅速排除故障,主要包括:机器人碰撞保护功能;工件安装到位检测;光幕安全保护。
7、码跺机结构如下:
-
控制系统
+关注
关注
41文章
5960浏览量
108684 -
机器人
+关注
关注
206文章
27016浏览量
201362 -
自动控制
+关注
关注
10文章
649浏览量
43683
发布评论请先 登录
相关推荐
德国BAHR直角坐标机器人在无损探伤设备的应用
直角坐标机器人和关节机器人的特性及应用对比
直角坐标机器人的定义及主要特点
关于直角坐标机器人码垛机,它的运行原理是怎样的
直角坐标机器人在纸箱搬运码垛中的应用分析
直角坐标机器人&关节机器人的区别详解
机械手的直角坐标|多关节|圆柱坐标|极(球)坐标式运行方式简述
直角坐标机器人&amp;关节机器人的区别详解

机械手的直角坐标|多关节|圆柱坐标|极(球)坐标式运行方式简述





 工商网监
工商网监
评论