 针对恒流源系统中存在的系统噪声和测量噪声的干扰问题
针对恒流源系统中存在的系统噪声和测量噪声的干扰问题
摘要:
光学测量领域中,光源对恒流源的要求较高,现有的恒流源系统存在着系统噪声与测量噪声,影响了电流的输出精度。将Kalman滤波算法与FOPID控制策略相结合,构建Kalman-FOPID控制器,在以BUCK电路为核心的流控型恒流源系统数学模型的基础上,利用MATLAB产生随机噪声,进行电流控制研究。仿真及实物验证表明,Kalman-FOPID控制器可以有效滤除恒流源系统的噪声干扰,提高输出电流的控制精度。
0 引言
恒流源是输出稳定电流以驱动负载工作的电源,常应用在半导体光源[1]、物性型敏感器件[2]、充电装置[3]等领域中,而恒流源输出电流的好坏,直接影响光学测量精度和应用对象使用寿命。因此,对恒流源的研究存在积极的现实意义。在对恒流源系统的研究中,文献[4]采用双级恒流源硬件电路,用以降低电流噪声的干扰,并应用于固态激光器;文献[5]通过谐振开关反馈控制MOS管,以解决负载的过流问题。上述对恒流源的研究,注重通过电路设计解决电流控制过程中产生的问题,但忽略了非理想状态下系统噪声和测量噪声的存在,以至于影响了恒流源系统的电流输出效果。
Kalman滤波算法可以有效解决控制过程中由噪声干扰引起的误差[6],分数阶PID(Fractional Order Proportional Integral Differential,FOPID)在温度系统[7]、生物反应器[8]等应用中控制效果显著。为改善恒流源的输出效果,本文提出将Kalman滤波算法与FOPID控制策略相结合,构建Kalman-FOPID控制器,并对恒流源电路进行数学建模,在利用MATLAB对Kalman-FOPID控制器的控制效果验证的基础上,进行硬件测试。实验结果表明,Kalman-FOPID控制器能够有效滤除系统中的噪声干扰,提高电流的输出精度,使系统稳定可靠。
1 恒流源系统与数学建模
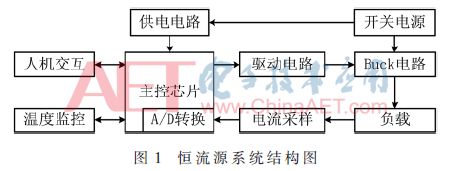
1.1 恒流源系统结构
恒流源系统结构如图1所示,用户输入设定电流值,主控芯片根据设定值输出占空比为D的PWM波,经驱动电路控制BUCK电路中MOS管通断,以调整加在负载两端的电压,而流过负载的电流值经电流采样、A/D转换为数字量后送入主控芯片内,主控芯片根据电流设定值与实际值的偏差调整PWM的占空比,以实现流过负载电流的稳定。
1.2 恒流源系统的数学模型
本文恒流源电路是基于BUCK电路来实现的,通过控制MOS管的通断改变负载两端的电压,以使流过负载的电流保持恒定,在忽略电感电阻和电容电阻条件下,电路原理图如图2所示。
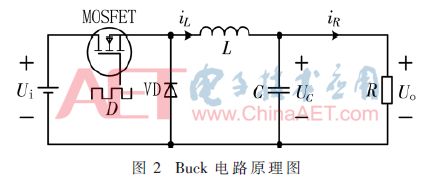
设恒流源的输入电压为Ui,驱动MOSFET的PWM波占空比为D,周期为T,电感电流为iL,电容电压为UC,负载R两端电压为UO,流过负载电流为iR。通过增大电感L,使BUCK电路工作在连续工作模式下。在任意t∈[ti-1,ti]时刻,i=1,2,3…,有:
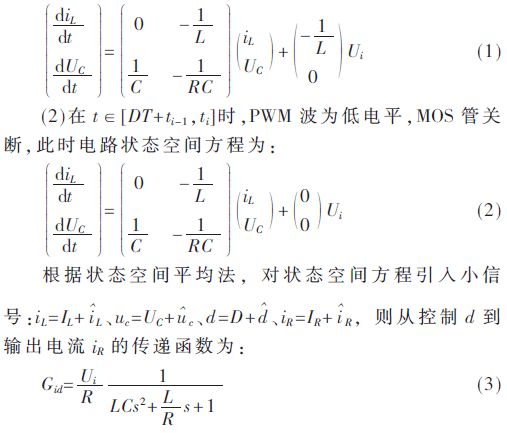
(1)在t∈[ti-1,DT+ti-1]时,PWM波为高电平,驱动MOS管导通,此时电路的状态空间方程为:
2 Kalman-FOPID控制器设计
2.1 FOPID控制算法
FOPID的频域形式为:

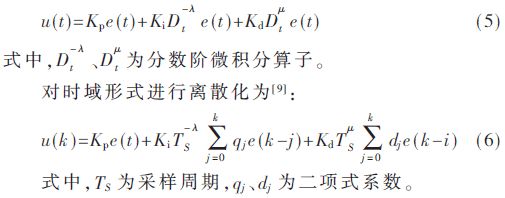
式中Kp、Ki、Kd为比例、积分、微分系数,λ、μ分别是积分、微分的阶数。IOPID是FOPID在λ=1、μ=1的特殊情况,有固定的整定方法,实现简单,但只有3个可调参数;FOPID有5个可调参数,虽然整定方法复杂,但参数设置灵活,控制效果较好,且鲁棒性强。FOPID在时域的形式为:
2.2 Kalman-FOPID控制器
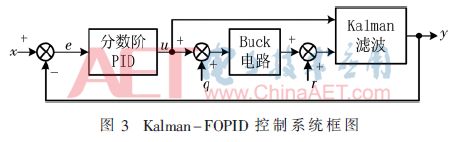
Kalman-FOPID控制系统框图如图3所示。将电流设定值x与实际值y的偏差e送入FOPID控制器中,输出u在受系统噪声q的干扰后驱动BUCK电路中MOS管通断,使负载工作;对负载电流采样时,采样值与实际值之间存在测量噪声r,利用Kalman滤波算法降低噪声q和r的影响,使电流实际值y准确反馈到控制器,以实现闭环控制。
Kalman-FOPID控制算法流程:
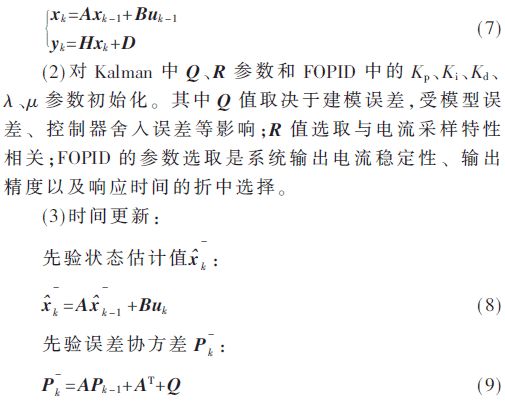
(1)对恒流源系统的传递函数进行z变换,得到离散型线性系统时域形式:
(4)根据设定值与观测值的误差e采用FOPID控制算法调整输出zk;
(5)测量更新:
计算Kalman增益Kk:
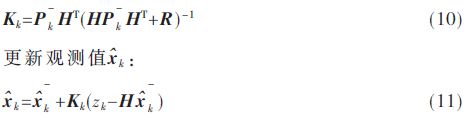
更新误差协方差Pk:

(6)重复步骤(3)到步骤(5),进行下一次Kalman-FOPID控制,直到输出电流满足系统要求。
3 实验分析
为了探究 Kalman-FOPID控制器对存在系统噪声和测量噪声干扰的恒流源系统的控制效果,采用MATLAB软件依次使用IOPID、FOPID、Kalman-IOPID、Kalman-FOPID 4种控制策略进行仿真,比较4种控制策略之间的控制效果,并利用硬件验证Kalman-FOPID应用在恒流源系统的可行性和控制效果。
3.1 仿真研究
根据恒流源系统的数学模型,设计参数为:Ui=12 V,L=2 H,C=4 400 μF,R=10 Ω,Ts=0.000 1 s,仿真时间为1 s。此时系统的流控型传递函数为:

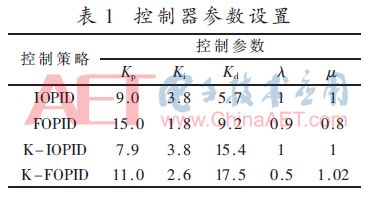
恒流源系统中存在的系统噪声与测量噪声,是利用MATLAB的随机函数rand()产生的,幅值为0.000 2。Kalman滤波算法中的参数初始化为:Q=1、R=1;各控制器的参数采用粒子群算法寻优并结合试验法得出最优值,具体如表1所示。
当控制系统输入为阶跃响应,幅值为1 A时,4种控制策略响应曲线及特性如下:
(1)IOPID与FOPID响应曲线
IOPID与FOPID在响应过程中受随机噪声的干扰,每次仿真的结果各不相同,图4是仿真结果之一,为了比较IOPID和FOPID的控制效果,连续仿真50次,统计各自最大超调量偏差、0.1 s后响应过程的最大波动误差,统计结果如图5所示。
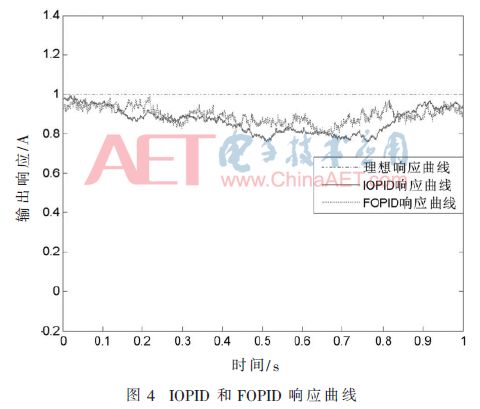
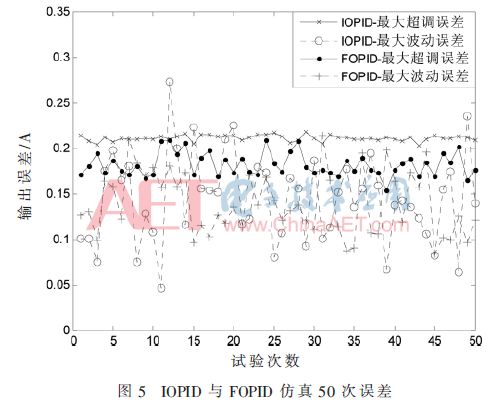
在多次仿真过程中,IOPID响应曲线在0.000 5 s达到最大超调量,且超调量比较稳定;FOPID响应曲线在0.001 2 s达到最大超调量,超调量波动较大,但总体小于IOPID的最大超调量;IOPID与FOPID在响应时间0.1 s后的最大波动误差变化都比较大。因此,IOPID与FOPID在有噪声干扰的恒流源系统中控制效果较差。
(2)Kalman-IOPID与Kalman-FOPID响应曲线
Kalman-IOPID与Kalman-FOPID中Kalman滤波算法可以有效降低随机噪声的干扰,多次仿真的结果相同,响应曲线如图6所示。
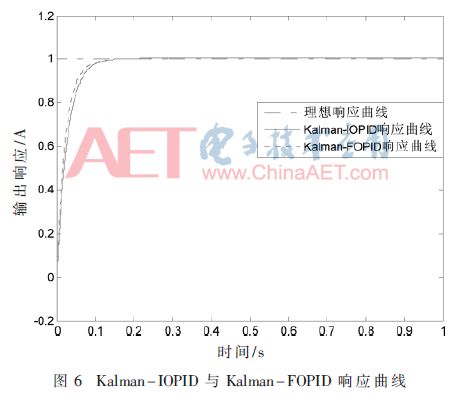
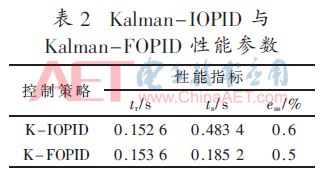
根据图6仿真曲线,控制策略的上升时间tr、稳态时间ts、稳态误差ess的参数如表2所示。与Kalman-IOPID相比,Kalman-FOPID上升时间tr较长,但从响应到稳态的时间为0.338 8 s,小于Kalman-IOPID的0.636 0 s,并且稳态误差也较小。因此,Kalman-IOPID与Kalman-FOPID可以有效控制存在噪声的恒流源系统,其中Kalman-FOPID从响应到稳态的时间短,稳态误差小。
通过采用MATLAB进行仿真研究可知,Kalman滤波算法可以降低随机噪声对系统的影响,将Kalman滤波算法与FOPID控制策略相结合的Kalman-FOPID控制器理论上可以控制存在噪声干扰的流控型恒流源系统,并取得较好控制的效果。
3.2 硬件测试
为进一步验证Kalman-FOPID算法控制效果,根据图1设计恒流源电路,采用Kalman-FOPID控制算法,硬件测试过程如下:
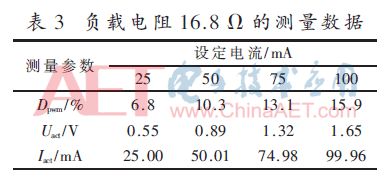
(1)当设定电流较小时,为了降低采样电阻的影响,选择较大的负载电阻。选取阻值为16.8 Ω,依次设定电流值,测量数据如表3所示。
(2)当设定电流较大时,为使系统输出较大电流,负载电阻应当较小。调整负载电阻为8.2 Ω时,不同设定电流值的测量数据如表4所示。

由测量数据可知,在小电流控制时,负载电阻为16.8 Ω时最大电流误差为0.04 mA;在大电流输出时,负载电阻为8.2 Ω时最大电流误差为0.53 mA。电流的设定值与实际值误差较小,表明Kalman-FOPID控制策略可应用于恒流源系统中,并且有效降低系统中噪声干扰,输出电流稳定、控制精度高。
4 结论
本文针对恒流源系统中存在的系统噪声和测量噪声的干扰问题,提出了将Kalman滤波算法和FOPID控制策略相结合,构建Kalman-FOPID控制器,在建立以BUCK电路为核心的流控型恒流源系统数学模型的基础上,合理设置参数,利用MATLAB模拟噪声干扰,进行恒流源的控制仿真。仿真结果表明Kalman-IOPID和Kalman-FOPID可以降低系统中噪声的干扰,输出电流的控制性能参数较好,其中Kalman-FOPID到达稳态的时间较短、稳态误差较小。通过搭建恒流源硬件控制系统实验电路,通过调整负载情况,观察测量电流输出,实验结果表明电流稳定性好、控制精度高,能够应用于对电流输出要求高的工业场所,尤其是对电流变化敏感的半导体光源,对其亮度质量的控制和使用寿命的延长起到促进作用。
-
噪声
+关注
关注
13文章
1070浏览量
47059 -
恒流源
+关注
关注
16文章
322浏览量
55731 -
Kalman
+关注
关注
0文章
11浏览量
8162
原文标题:【学术论文】Kalman-FOPID算法在数控恒流源中的控制研究
文章出处:【微信号:ChinaAET,微信公众号:电子技术应用ChinaAET】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
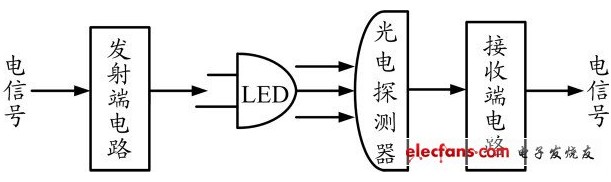
白光LED通信系统的噪声与干扰分析






 工商网监
工商网监
评论