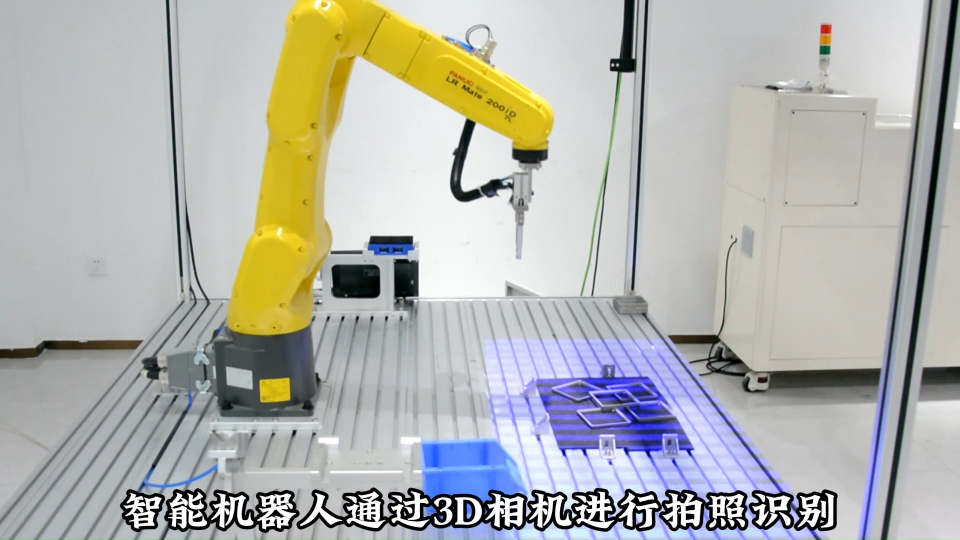
 关于3D TOF机器人防撞和导航检测
关于3D TOF机器人防撞和导航检测
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
206文章
26971浏览量
201289 -
3D
+关注
关注
9文章
2752浏览量
106427 -
导航
+关注
关注
7文章
502浏览量
41470
发布评论请先 登录
相关推荐

制作一只3D打印的遥控机器狗
/Explore_using_a_customized_Arduino_Nano_based_board_to_wirelessly_control_up_to_078e9d15.html
步骤2:机器狗3D部件组装
总共有4
发表于 03-14 14:52


LabVIEW的六轴工业机器人运动控制系统
将系统分为算法实现和仿真模块、DSP控制模块、及机器人驱动模块,以验证算法的有效性。
KUKA KRAGILUS工业机器人的实体控制测试:最终,项目工业机器人的实体控制。在LabVIEW建立的
发表于 12-21 20:03
光学3D表面轮廓仪可以测金属吗?
光学3D表面轮廓仪是基于白光干涉技术,结合精密Z向扫描模块、3D 建模算法等快速、准确测量物体表面的形状和轮廓的检测仪器。它利用光学投射原理,通过光学传感器对物体表面进行扫描,并根据反射光的信息来
发表于 08-21 13:41
【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
通过视觉传感器(或组合式的色标传感器),检测事先铺设在地面的色带与移动机器人(AGV/AMR)的相对位置,从而使小车沿既定路线(色带)行驶。
**色带导航优点:**铺设容易改路径,成本低
发表于 06-28 09:52
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现
人类社会中发挥着越来越重要的作用。但移动机器人拥有自主导航能力,才能进一步完成上诉所设定的任务。可以说自主导航能力是移动机器人最为基础和核心的技术,而上位机软件的实现与设计,则进一步推
发表于 06-28 09:36

【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
移动机器人导航是指移动机器人确定自己在地图参考系中的位置后,自动规划出通往地图参考系中某个目标位置路径并沿着该路径到达目标位置点的能力,是移动机器人行动能力的关键。基于整个智能制造的发






 工商网监
工商网监
评论