 集成Arduino和Xsens Awinda惯性测量套件的可穿戴式人体运动测量设备原型
集成Arduino和Xsens Awinda惯性测量套件的可穿戴式人体运动测量设备原型
摘要:
针对高精度行人室内自主导航与定位的应用需求,设计了集成Arduino和Xsens Awinda惯性测量套件的可穿戴式人体运动测量设备原型。该系统穿戴方便,可靠性高,实现了双足IMU信息与足间距离的同步测量,支持数据的无线传输、远程保存与分析。足间距离通过改造的双SRF10超声波测距模块进行连续采集,并结合双足惯性测量数据使用零速检测算法得到步行步态规律,有助于提高行人惯性导航定位精度。
0 引言
目前,自主导航技术主要依靠空间与时间上的步态参数,结合生物学特征进行运动估计与导航定位。一种思路是利用传感器测量目标部位的运动信息,通过分析人员行走时的信号特性来估计运动特征确定步频、步幅,与航向测量系统结合得到运动轨迹,不足之处在于针对实际行走过程中多变状况难以保持持续的高信号识别率。另一种思路是检测脚部着地时的零速度状态,并将零速值作为卡尔曼滤波的观测值,修正惯导解算误差。人在步行时,双足的着地时间较短,因此辅助作用有限。而且零速状态检测方式对陀螺仪输出误差修正的作用有限,随时间推移会造成步行轨迹的较大偏差。
足间距离是一个可用的导航辅助信息。目前此思路的研究工作主要分为3个方向:(1)通过跟踪双足距离标定两个陀螺零偏,从而约束方位漂移,其中足间距的确定使用的是超声波收发器[1];(2)在算法中设定双足间的距离阈值约束来减少航向误差[2-4];(3)使用单发多收的思路,分别在双足布置多个超声波收发器,通过不同位置接收器的时间差得出脚步的位移信息和姿态信息[5]。
本文以此思路为出发点,设计了以Arduino开发平台和Xsens Awinda MTw惯性传感器为核心的可穿戴式人体运动测量设备原型,实现了惯性信息和足间距离信息的连续、同步测量。
1 系统原理
使用微机电惯性测量单元(MEMS Inertial Mesurement Unit,MEMS IMU)测量双足运动过程中安装位置的惯性数据。系统平台设计目标满足4个要点:(1)在实际步态条件下实时测量双足间的距离,要求数据准确稳定,数据反馈灵敏;(2)各传感器测量信息同步采集;(3)自动保存与处理数据;(4)设备便携易用,方便穿戴。本系统硬件搭配思路如图1所示。
使用两个超声波测距模块测量双足在任意相对位置时的距离,超声波数据发送端负责测距,每隔一定周期将数据无线传输至超声波数据接收端。另一方面,双足惯性运动信息通过中控单元同步采集并传送至计算机端。计算机端结合控制时序得到各传感器的同步测量信息。
2 系统硬件设计
2.1 Xsens MTw Awinda套件
Xsens MTw Awinda惯性测量开发套件包括数据中控单元Awinda Station和多个惯性传感器MTw。基于IEEE 802.15.4的无线Awinda Protocol确保数据传输至Awinda Station。各MTw单元间数据采集同步误差小于10 μs。单元内部采样率为1 800 Hz。Awinda Station包括4个BNC同步I/O端口,其中两个同步输出端口Sync Out Line1和Sync Out Line2向外部发送控制信号,控制信号源自Awinda Station采数时内部数据帧转换(Frame Transition),表示每个计算周期数据帧转换结束的时刻。
MT Manager是与MTw Awinda的交互控制界面,使用内置消息终端(Device Message Terminal)监视惯性传感器信息,可以设置MTw的无线更新率和Awinda Station的同步信号触发方式。
从大量文献看,多数以MEMS IMU为基础的行人导航定位研究均以Xsens惯性运动传感器作为测量平台。
2.2 测距控制板
本设备使用两个Arduino开发板作为核心控制模块。一个作为超声波数据测量与发送端,负责超声波数据的采集与发送,随身携带。另外一个作为超声波数据接收端,与Awinda Station数据同步。
2.3 测距模块
针对足间测距场景要求,本设备采用超声波测距方式进行测量。Devantech SRF10测距范围为3 cm~6 m,精度1 cm,具备滤波降噪功能,探头波束角72°,包括400ST100发射探头、400SR100接收探头和控制电路3个主要部分,数据间通过I2C协议通信。对连接同一I2C总线上的SRF10须配置不同I2C地址。须注意Arduino和SRF10的I2C地址转换。
通过SRF10寄存器可以修改测距范围和模拟增益,合适的参数可以减少测量误差。增益调整得越大,接收微弱回波的敏感度越大。
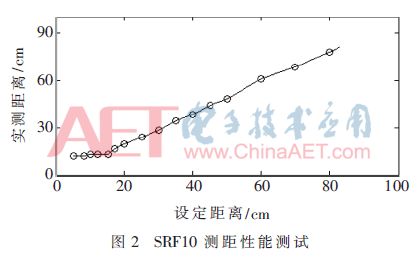
为适应正常步态条件下对步距的实时测量,延长SRF10发射探头与控制芯片的连接,改造为对射式超声波模块。使用激光测距标定测量误差,实测距离与真实距离关系如图2所示,在真实距离小于20 cm时,实测值偏差较大。
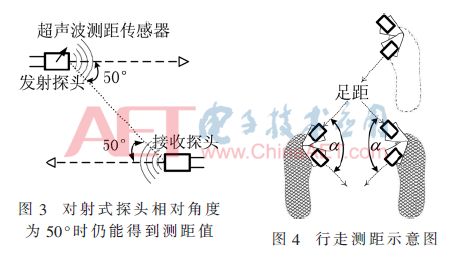
超声波测距模块的方向性测试如图3所示,经改造的SRF10在收发探头之间相对角度为50°以内时能得到较好的测距结果。两个经过改造的测距模块在安装时分离一定角度,测距示意如图4所示,测距模块探头之间的夹角为α。进行多次预测试,当步距范围为10 cm~100 cm时,夹角α调整为60°~100°能保证人员行走时的正常采数。本系统平台中,夹角α设置为90°。
I2C总线中SCL和SDA均使用阻值为1.8 kΩ的上拉电阻钳位在高电平,SRF10的SCL与SDA引脚分別与Arduino模拟引脚A5与A4连接,两个SRF10并联,作为I2C总线的从机。模块发送超声波采集数据时,I2C的SDA被拉高,保证数据传输,当得到测距结果后,SRF10再次响应I2C总线,这一点对确定系统时延和实现同步操作非常重要。
2.4 无线传输模块
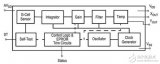
nRF24L01是GFSK单片射频收发芯片,工作频段为2.4~2.5 GHz ISM,通过SPI接口选择频道和设置协议,SPI接口按主从方式工作,全双工模式,以同步时钟节拍传输无线数据,串行数据流中信号码元间相对位置固定。上电后通过CE接口配置模块,本设备使用增强型ShockBurstTM模式控制数据的应答和重发功能。
两个nRF24L01分别作为发送端与接收端,每一周期采集的两组测距信息同时远程传输,数据实际大小为8 B。
2.5 目标设备的硬件改造与搭配
系统硬件构成示意图如图5所示。
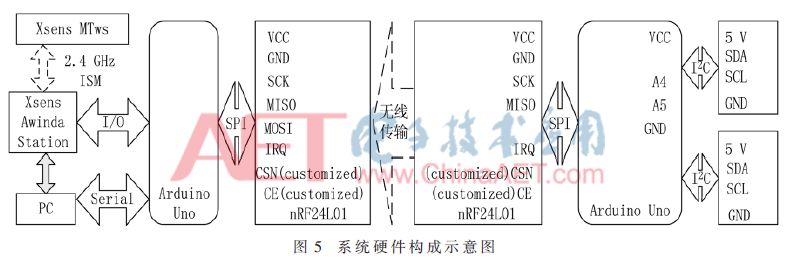
本设备使用TI TXS0108E双向电平转换芯片保证模块间正常通信,其最大数据速率为110 Mb/s(推挽)、1.2 Mb/s(开漏)。芯片A端口跟踪VCCA引脚电源电压,连接3.3 V电压值引脚。B端口跟踪VCCB引脚电源电压,连接5 V电压值引脚。输出使能OE引脚输入高电平。
硬件结构分为数据采集、接收与处理几部分。经改造的对射式SRF10超声波测距模块收发探头分别安装于不同的Xsens MTw之上,探头间连线绕过身体躯干由魔术扣固定,Xsens MTw置于鞋面。自行设计的安装组件具备调整发射与接收探头之间角度的功能。MTw的坐标系示意和设备安装情况如图6所示,
3 数据采集与处理流程
系统主要工作流程为:设备的穿戴与安装、目标运动与数据采集、数据无线传输、数据融合、数据保存与处理。图7所示为设备数据采集与传递流程。采集的运动数据无线传输至超声波数据接收端和IMU数据接收端,计算机同时接收具有时间戳的超声波测距信息以及IMU惯性运动参数信息,进行同步处理和数据解算。
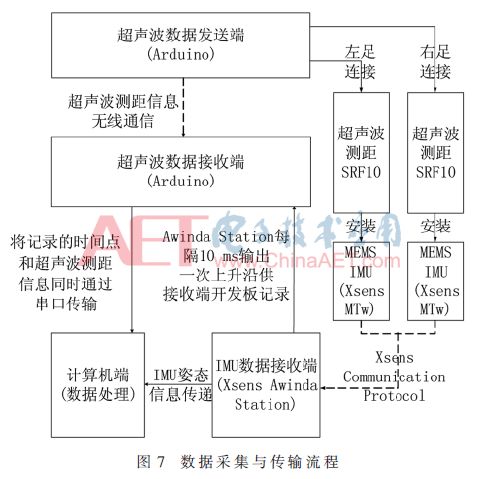
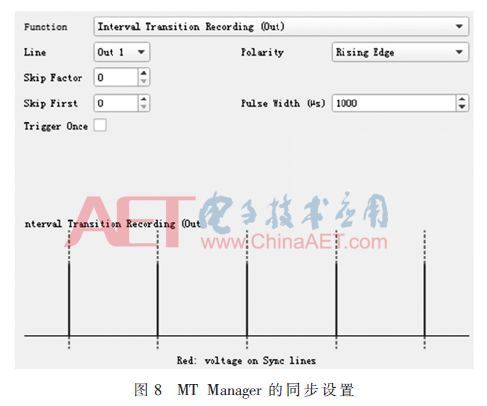
图8所示为MT Manager同步信号触发方式设置,Awinda Station通过Sync Out Line1向外部发送上升沿同步信号,发送周期为10 ms,与IMU数据更新周期相同,信号脉冲宽度为1 ms。Awinda Station从给出指令启动记录时开始数据采集与计算,使用Interval Transition Recording同步方式确保准确得到数据记录期间Awinda Station的系统时钟。
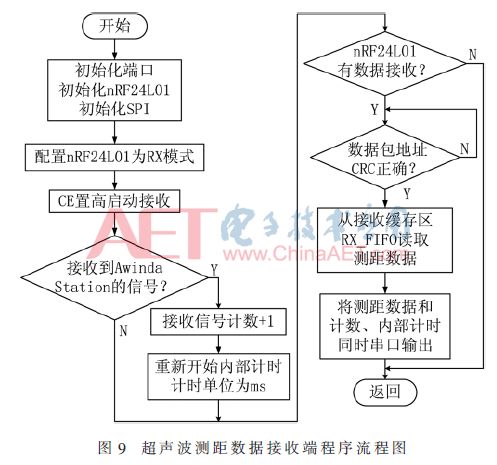
一方面,超声波数据接收端Arduino对每一帧Awinda Station的同步输出上升沿信号使用内部中断进行计数,实现采集时间的精确同步,同步精度达到1 ms。一旦接收到两个超声波测距数据,则将测距数值与此刻的计数结果同时输出,得到原始数据。超声波数据接收端Arduino程序流程图如图9所示。两块MTw无线惯性传感器的惯性数据更新频率为100 Hz。另一方面,Awinda Station将采集得到的惯性数据输出至计算机,文件中包含MTw各传感器输出(Sensor Component Readout)。
SRF10以ms为单位进行足距数据采集,数据处理时转换为距离测量值。由于两个SRF10同时测距会造成干扰,因此将测距时间间隔设置为20 ms,每次测距完毕时发送端将两个测距数据同时传输到接收端,SRF10测距周期与超声波数据发送周期均为50 ms。
对于超声波测距频率的选择,考虑以下几点:(1)普通人以常速行走时一次完整的步态周期大约为1.2 s~1.8 s,而任意一只脚离地阶段时间占比约为31.8%[6];(2)基于人在各种运动(如行走、跑步等)中的步幅,将模块测距范围设置为2 m,测距模块需要约5.8 ms处理数据,所以SRF10超声波测距采数周期不能低于此时间长度,调整模拟增益与模块探测频率和测距范围参数相配合;(3)超声波测距模块输出频率与Awinda Station输出频率设置为整数倍关系,使数据间传递相配合。
在超声波数据发送端,SRF10在采集得到数据后需要延时一段时间(程序中设置为20 ms)才能从寄存器中读取测量数据,通过示波器分别检测超声波探头开始工作时的脉冲信号和超声波数据接收端Arduino接收数据的脉冲信号,得到设备数据传输过程平均时间总共需要消耗21.5 ms,多出的1.5 ms主要是无线传输过程所花费的时间,基于数据判定SRF10具体的启动与测距的时刻,将测距数据与IMU数据结合,完成同步采集。
设备同步过程以Awinda Station内部时钟为基准,另外超声波测距周期最快可以调整为30 ms。
4 设备数据采集与处理
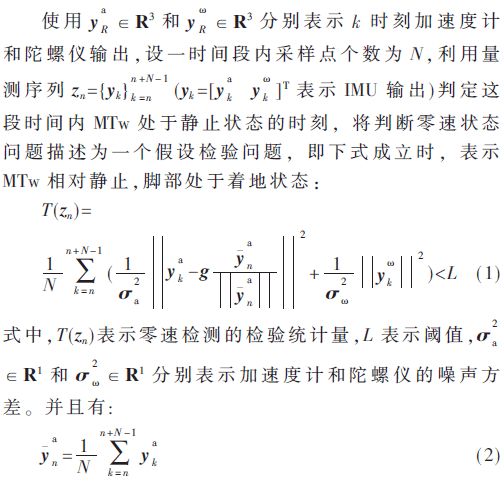
使用两个SRF10对人体正常步态条件下的实时足距进行测量,由于超声波探头存在波束角,对于本设备模块的安装方式,同一时刻可以获得两个测量值,需要在一个步态周期内确定相对准确的测量值。思路为结合Xsens MTw采集得到的惯性运动参数,应用零速检测算法(Zero-Velocity Detection)[7]得到双足对地保持相对静止的时间段,从而得到步伐运动规律。
利用以上零速检测算法使用此穿戴设备进行数据采集测试,沿直线常速(约5 km/h)行走,选取数据时间长度10 s,测量人体运动数据结果如图10所示。
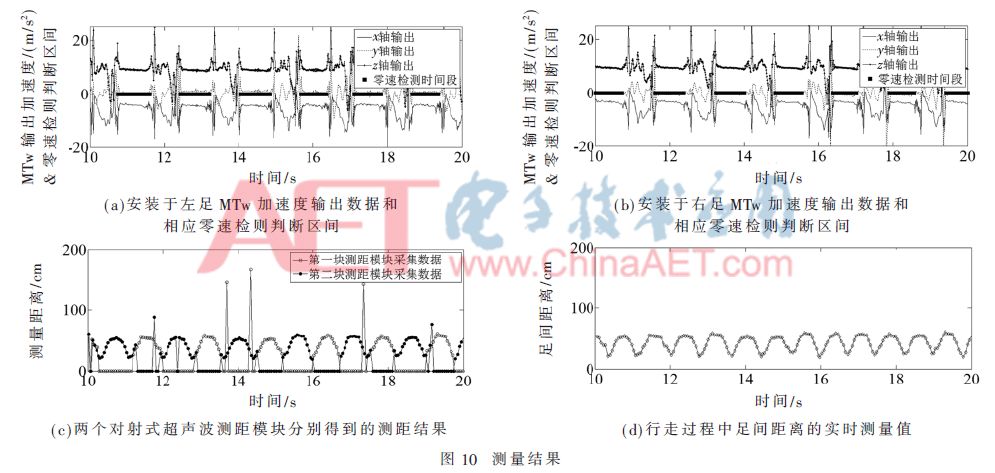
图10(a)和图10(b)分别表示安装在左足MTw和右足MTw测量得到的加速度计三轴输出和使用零速检测算法判断得到的足部处于着地阶段的状态,据此得到双足触地、着地、抬脚、摆动等周期步态。图10(c)表示两个超声波测距模块分别得到的测距值,由于声波反射测距的特性,实际测量值存在一部分野值点。将两个模块的测距结果依据步态信息进行选择及处理,方式如下:(1)根据惯性传感器输出判断每一步运动方向;(2)以步行方向为前向为例,正常情况下一只脚在刚触地时刻位置位于另一只脚斜前方,依据前述模块安装条件,选取此时符合此角度测量位置的模块的测距值;(3)对每一次步伐采取上述操作,结合双足相对位置变化规律最终得到足间距离的实时测量值,同时剔除部分野值点,得到最终测量结果如图10(d)所示。
5 结束语
本系统集成惯性测量单元和超声波测距传感器可以直接实时测量得到行人运动过程中的双足间距,并实现行人导航数据的同步采集,推进以步距作为新的行人导航约束条件的研究工作,使用无线通信模块实现数据的远程保存与处理,不必随身携带计算终端,穿戴较为轻便,数据采集稳定可靠,满足穿戴式的人体运动测量使用要求。以此硬件平台为基础,进一步工作包括:(1)针对多种步态情况采用更多超声波测距收发模块测量更复杂角度情况下的足距;(2)平台整体趋向模块化,为完善导航鞋功能提供思路,数据处理部分根据实际使用需求可移植至其他设备终端。
-
传感器
+关注
关注
2525文章
48056浏览量
739941 -
接收器
+关注
关注
14文章
2214浏览量
70655 -
Arduino
+关注
关注
184文章
6427浏览量
184803
原文标题:【学术论文】带足距辅助的双惯导行人导航硬件系统设计
文章出处:【微信号:ChinaAET,微信公众号:电子技术应用ChinaAET】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论