 探讨自动驾驶的前世今生
探讨自动驾驶的前世今生
自动驾驶的冬天?
2017年,Mobileye发表了一篇文章《On a Formal Model of Safe and Scalable Self-driving Cars》。在这篇文章中,Mobileye提到了Winter of Autonomous Car。这应该是第一次提到,至少是在略微严肃的技术文章中。
文章认为自动驾驶汽车面临的两大挑战是(1)如何确保安全性;(2)如何在成本约束下规模部署。文章认为如果从业者忽视这两个问题,整个领域就将被带入冬天,如同AI的冬天一样。
提出问题,分析问题,解决问题是写论文的套路,这篇文章也不例外,它在放了一炮,吓唬了大家一下以后,给出了解决思路。
文章提到的思路并不复杂:
(1)要确保安全,就要把安全定义清楚,安全定义清楚了才能做出符合安全定义的产品来,于是他们给出了一个关于安全的定义,名字叫做Responsibility Sensitive Safety,愚蠢的翻译过来就是责任敏感安全。
什么是责任敏感安全呢?通俗的讲就是:不主动,不拒绝,出了事情不负责。不主动就是事故的发生不是自动驾驶汽车引起的;不拒绝就是你非要把我拉入到事故进行亲密接触,我也没辙。有了不主动,不拒绝,自然也就不负责了,很佛系,对不对。
(2)安全定义清楚了,就要规范化的描述这个定义。文章把符合人类关于“这个事不赖自动驾驶”的各种常识,采用了数学化的语言进行描述。
(3)有了这个关于安全的可解释的、规范化的、参数化的描述后,自动驾驶安全相关的可测试性自然也就满足了。
(4)在上述关于安全的定义和描述的基础上,量化指标,就可以制定出一个安全性标准和一个测试标准
(5)有了这些标准后,自动驾驶就可以进行合规认证了。
(6)合规认证后就可以卖了,然后就可以数钱了。
毫无疑问,这是一条康庄大道,通过从业者不懈的努力,在这条道路上走下去必定能够走向成功。问题是,这条路到底有多长?要走多久?需要多少干粮?
估计Mobileye心里也没底,要不然他们也不会把这个前沿的、深刻的认识写出来告诉大家,也不会四处做报告进行宣讲。
连Mobileye这个已经躲进了Intel大厦的家伙都想快点赶路,都想赶在冬天之前把大家聚在一起取个暖,那些还在海滩上晒太阳,除了一身肉,干粮没多少的墨镜男,是不是也该收拾收拾看美女的心,找个地方避一避了呢?
在寻求自动驾驶汽车的道路上,必然要经过冬天,这一点是无法否认的,问题是如何度过冬天。
有人说,靠AI呀。
问题是:AI过冬都要靠自动驾驶,而不是反过来。
如果还是有人觉着手中有粮,心中不慌,那么请反驳一下文章中这个论据吧:
人类司机驾驶汽车每小时发生事故的次数是0.000001次,即10^(-6);
如果让人类接受自动驾驶,那么自动驾驶汽车每小时发生事故的次数需要达到0.000000001次,即10^(-9)次;
也就是说,自动驾驶要证明能够做到这一点,就需要用10^9小时的安全驾驶数据,这也意味着需要行驶300亿英里;
而路试里程最多的谷歌Waymo在2018年3月才刚刚大肆庆祝了自己路试500万公里的伟大胜利。
AI的夏天之AI的诞生
AI的冬天大家都说有两次,第一次是1974-1980;第二次是1987-1993。
那么AI的夏天呢,也有两次,第一次是1963-1974;第二次是1983-1987。
1956年,新中国三大改造完成,我们正式宣布进入了社会主义。巧的是这一年AI也诞生了,故事是这样的:
1948年,图灵发表了一篇叫做《Intelligent Machinery》的文章。
同样在1948年,一个21岁,名叫McCarthy的美国热血青年,在听了一堂把人脑和计算机比较的讲座后,决定参加革命。他觉着计算机能够像人脑一样思考的时代不远了,他觉着这一伟大的责任降临到了自己身上,于是,1949年他加入了共产党,这个不是故事,他的确加入过,虽然很快就退出了。
1951年他博士毕业了,论文是关于偏微分方程的。毕业后,他去了普林斯顿工作,岗位是辅导员。梦想很大,起步却很低,革命信念坚决的他在1952年决定离开普林斯顿。
他去了贝尔实验室,在这里他遇到了贵人,信息论的创始人Claude Shannon。这个时候的Claude Shannon对如何把Computing Machinery变成Intelligent Machinery也很有兴趣,只不过他选择从比较扎实的Automata入手。于是二人合作起来,准备出本特刊,特刊的名字叫Automata Studies。特刊收到了很多文章,可都不是他想看到的,他要的是怎么实现共产主义,可是这些文章写的全是怎么搞市场经济。
他决定离开贝尔实验室,1953年他得到了斯坦福的一个教数学的代理副教授的职位。在这里,他只能继续搞他的数学分析和偏微分方程,革命陷入了低潮。
他在放弃与坚守之间摇摆,直到1955年发生了一件青椒们都要遭遇的事情。这件事情发生后,他决定不再摇摆了。这件事情就是评职称,他转正失败,没评上副教授。
如此境地,能够慰藉自己的只有梦想了,他决定离开一线城市的一流大学,去一个偏于一隅的二流大学拿个副教授,然后搞自己想做的事情去。于是,1955年,他拿到了达特茅斯学院的副教授职位,工作仍然是教数学。
达特茅斯的空气是自由的,没有雾霾,也没有山头,时间是大把大把的,他很开心,他努力寻找机会。
机会留给了有准备的人,这一年IBM决定研发一款适用于高校和科研机构的计算机,于是IBM召集了一个研讨会,作为达特茅斯学院的代表McCarthy同志就这样认识了比他大8岁、来自IBM的NathanielRochester。认识的过程可以想见,那就是McCarthy同志的伟大理想吸引了Nathaniel Rochester。
目前为止,拥有满腔革命热情的McCarthy同志还没有摸过枪,他一行代码也没编过。所以当Nathaniel Rochester诚恳的说,夏天的时候来我们IBM见识见识真玩意吧。他果断答应了,就像二嘎子、二虎子遇到了八路军一样。
1955年的那个夏天,McCarthy和Nathaniel Rochester在IBM过的很愉快,他们计划在1956的夏天弄个研讨会,讨论一下这个伟大的梦想。于是McCarthy同志决定向洛克菲勒基金会写个项目建议书,为了能够审批通过,他说服了大咖Shannon也参与进来。
这个项目建议书的名字叫:
《A PROPOSAL FOR THE DARTMOUTHSUMMER RESEARCH PORJECT ONARTIFICIAL INTELLIGENCE》。

AI这个词就这么诞生了,诞生在一个夏天:1955年8月31日。
而这之后,它将经历两次酷暑以及两次所谓的寒冬。在酷暑中,他不知所措。在寒冬中,它颤颤抖抖。而这剧烈变化的推手并不是身在其中的人们,而是另有他情。
谁是L4? 站出来瞧瞧
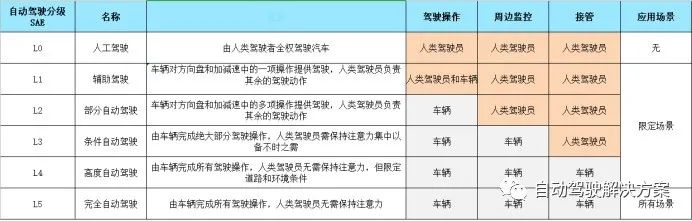
吃了阿波罗,由金龙变身的阿波龙说:“您好,我是L4;L4是自动驾驶水平达到第四级别的意思,是由美国汽车工程师学会SAE J3016自动驾驶分级标准定义的。 在标准中,自动驾驶的水平总共分了0-5,六个级别,从小到大,一个比一个高级。L4是非常高级的呦。”
问题是:L4高级吗?阿波龙是L4吗?
(1)先说SAE
SAE = Society of Automotive Engineers,前身是1905年创建于美国的Society of Automobile Engineers,目的是通过工程师们的技术交流,制定技术标准,促进汽车行业中主机厂、部件供应商之间更好的协作。第一任的主席是一个搞技术的,副主席也是一个搞技术的,副主席的名字叫Henry Ford,当时是一个连续创业尚未成功的中年大叔,后来成功了,搞了个公司叫福特汽车。
SAE自成立之后,会员发展的很快,工作推进的也很有成效,影响自然也就大了。在1916年的会议上,来自航空工程师协会、拖拉机工程师协会的代表们,提出了想要加入这个工友之家的意愿。于是,就加入了。这下,名字自然就不能叫Society of Automobile Engineers了。
工人阶级里总能出几个知识分子,SAE也出了一个,这个人名字叫ElmerAmbrose Sperry,他是一个发明家,发明了陀螺仪,创立了个公司名字也叫Sperry。公司发展的很好,进过世界500强的前100名。这个公司在60、70年代,还与霍尼韦尔公司打了一场关于世界第一台电子计算机ENIAC的专利大战。到了80年代,美国很多公司开始搞恶意并购,很不幸Sperry尽管实施了毒丸条款,但还是被恶意并购了。并购后,就被切着卖了,买家包括福特、洛马、格鲁曼、霍尼韦尔等。
书归正传,就是这个叫Elmer Ambrose Sperry的人,面对工友之家的命名困境,创造了一个词Automotive。用它来代替Automobile以体现工友之家的广泛性。Auto代表自己,motive代表移动。自己有动力,有动能的东西都算Automotive。
于是Society of Automobile Engineers摇身一变成了 Society of Automotive Engineers。但目前中文翻译依然是美国汽车工程师学会,比较好玩的是SAE的分舵 SAE china将自己称作国际自动机工程师协会。很无聊吧。
那么为什么我也这么无聊能知道这些呢?因为2009年,我在研究JAUS无人系统参考架构的时候,突然发现这个标准发布主体变成了SAE。
(JAUS是美国国防部在1998年搞的,原名叫JAUGS地面无人平台参考架构,这个架构旨在构建能够实现UGV、UAS、UUV、USV之间,以及各平台内部模块之间互操作的标准)。
我觉着把JAUS交给SAE还可以呀,毕竟是搞车的嘛,可是奇怪的是负责这个事情的技术小组叫做航空电子专业委员会AS-4。于是,我就要搞清楚你汽车工程师学会怎么还有搞航电的呢,于是我就无聊了一下,知道了这些。
(2)再说J3016
说完SAE,再说J3016。SAE J3016是SAE的标准,英文原名如下:
(R)Taxonomy and Definitions forTerms Related to Driving Automation Systems for On-Road Motor Vehicles。
该标准于2014年1月、2016年9月、2018年6月先后出了三个版本。
第一个问题,SAE J3016是什么?
顾名思义,把英文翻译过来就好。比较准确的翻译,或者说为了更准确的理解的中文翻译,我认为是:《道路上的机动车辆的驾驶自动化系统相关术语的定义以及驾驶自动化系统的分类》。
通俗的理解就是:有一种事物叫道路上的机动车辆,这个道路上的车辆上有个驾驶自动化系统,在描述这个驾驶自动化系统的时候会用到一些措辞,那么咱们就把这些措辞进行确切的定义,之后再利用这些确切的定义去描述驾驶自动化系统的分类,免得以后产生交流上的歧义。
对的,这个标准的本质就是定义一组具有确切定义的措辞,达到无歧义交流的目的,它绝不包含用来评价驾驶自动化系统水平高低的评价标准和体系。
第二个问题:这个J3016标准实施了吗?
答案:法规层面没有实施,因为法规还在路上,但在路上的法规大多已默认了这个标准定义的措辞以及分类。
先来看一下美国自动驾驶的立法历程,总结起来就是1个法案+2个指南+3次听证,按时间顺序如下:
第一次指南:2016年9月,美国高速公路安全管理局(NHTSA)发布《Federal AutomatedVehicles Policy》;此文中引用了SAE J3016。
第一次国会听证:2017年2月4日,Self-Driving Cars: Road to Deployment。
第二次国会听证:2017年3月28日,Self-Driving Cars: Levels of Automation。
第三次国会听证:2017年6月27日,Self-Driving Vehicle Legislation(June 27, 2017)
第一次通过法案:2017年7月27日,众议院通过SELF DRIVE Act。但还需参议院过会和总统签字才能形成法律。
第二次指南:2017年9月,美国高速公路安全管理局(NHTSA)发布了最新的指导性文件:AutomatedDriving Systems (ADS): A Vision for Safety 2.0.
其中第二次国会听证是SAE的主场,这是SAE第一次获得了在参加美国国会听证会的机会,听证的题目是:“Self-Driving Cars: Levels of Automation.”。听证会的完整记录在下面:
https://energycommerce.house.gov/hearings-and-votes/hearings/self-driving-cars-levels-automation
第三个问题:这个J3016分级的主要目的是什么?
在“Self-Driving Cars: Levels of Automation.”听证会上,SAE阐述了J3016这个标准的主要目的:
-Clarifying the role of the (human) driver, if any, duringdriving automation system engagement.
我们要阐明:在一辆有驾驶自动化系统的车上,如果有司机(或者人类),那么这个司机(或者人类)应该承担什么角色?
-Answering questions of scope when it comes to developing laws,policies, regulations, and standards.
我们要回答:那些方面需要立法、政策、规定和标准
-Providing a useful framework for driving automationspecifications and technical requirements.
我们提供了一个驾驶自动化系统规格说明以及技术需求的框架;
-Providing clarity, consistency, and stability in communicationson the topic of driving automation, as well as a useful short-hand that savesconsiderable time and effort.
我们提供了一套措辞,使得自动驾驶相关问题描述的更清晰、一致和稳定,使得交流更加高效。
综上,可以看出J3016进行分级的主要目的是两个:
1)通过分级,更准确的描述司机(或者人类)在安装了驾驶自动化系统的车辆上的角色问题,以便推进立法端的工作;
2)通过分级的定义,提供了一个描述驾驶自动化规格说明以及技术需求的框架,以便推进产品端的工作。
第四个问题:J3016是如何对驾驶自动化系统进行分级的呢?
很多文章都已经从技术角度,描述过这些级别的差异了,但这不是J3016的根本目的,它的根本目的是通过描述用户的使用差异以及责任差异,来提供一个进行产品规格描述的框架,进而能在立法端分清用户与系统的责任,也进而在产品端明确其应该承担的责任。
所以,以下分级问题的介绍,主要是从用户的责任和使用差异出发,这个方面SAE里已有,不过很多人选择忽视。
L0无驾驶自动化:你全程都是个司机,你必须做任何跟司机有关的事情,承担司机应该承担的责任。
L1驾驶辅助:你全程还是个司机,驾驶自动化系统可以帮你控制速度或者转向中的一个,但是你必须a.做其他所有的驾驶相关任务,b.你要监控驾驶自动化系统的运行,必要时为了安全你必须介入,c.决定是否让驾驶自动化系统帮忙,决定什么时候让它帮忙,d.当你觉着应该接管或者需要你接管时,你必须马上接管驾驶。
辅助指的是:驾驶自动化系统只是来帮忙的,让不让帮,让什么时候帮,帮什么,怎么帮,你来定。
L2部分驾驶自动化Partial Driving Automation :
你全程还是个司机,对你的要求,与L1相同,区别是驾驶自动化系统可以帮你同时控制油门和转向。
部分指的是:它能帮你控制速度和转向这个部分,但你还要自己看路。
L3有条件的驾驶自动化:Conditional Driving Automation
驾驶自动化系统可以帮你控制速度和转向,并且帮你看路,你不用全程做司机了,但你仍然有司机的责任。(1)在启动驾驶自动化系统之前,你仍然是司机,你必须a.确认驾驶自动化系统是否完好,b.决定开启系统的时机。(2)当驾驶自动化系统启动后,只要系统不请求你接管,你就不再是司机了,但是在系统请求你接管时,你必须要及时接管。而一旦你接管,你又变成了司机。
“有条件”指的是:(1)在驾驶自动化系统要求你接管时,你必须要接管驾驶自动化系统;(2)只有在驾驶自动化系统开启运行时,你才能不要司机的身份,但你的身份仍然不是乘客,因为你必须要随时准备去接管,随时重回司机的身份。
L4高度驾驶自动化:High Driving Automation
驾驶自动化系统可以帮你开车,它启动后,你就可以不再是司机,但是在启动驾驶自动化系统之前,你必须承担司机的责任或者有人帮你承担司机的责任,这个责任是:a.确认驾驶自动化系统是否完好,b.决定开启系统的时机。当驾驶自动化系统开启之后,你就是乘客了,当系统请求你来接管时,你可以不管它,由它自己来解决自己无法自动驾驶时的问题,但是,如果你接管了,那你就成了司机,驾驶任务和责任就归你了。
高度驾驶自动化的高度指的是你终于有不做司机的权利了,可以站在甩手掌柜的高度来看着这辆车自己开了。
L5完全自动驾驶:Full Driving Automation
你的角色与L4中相同,不同的是L4是在某些情况下可用,L5则是任何情况都能用。
完全驾驶自动化的完全指的是:在什么情况下,系统都能进行L4自动驾驶。
第五个问题:级别越高就代表着难度越大,技术越牛吗?
貌似是这样,但显然不是。
这个Level描述的核心是用户的角色问题,从低到高,用户的责任逐渐减少的,直到退化成一个乘客。尽管乘客的责任减少必然意味着系统责任的增多,但责任的增多,只在驾驶自动化系统运行时才增多。如果系统可用性不好,也就是说只能在有限的情况下可用,那么这样的系统难度也未必大。
很多公司特意强调级别越高难度越大这个事情,还有的公司按照不同级别来分不同的研发部门,有搞L3的部门,有搞L4的部门,那我只能说,这是非常不专业的做法,更不专业的是喊出L3.5这个概念的公司。
所以为了以正视听,在2018年6月新版的J3016里,特别强调了这个级别不是描述技术难度的,它亲口说了,这个级别不暗含着L4比L3或者L2好,原文如下:
While numbered sequentially 0 through 5, J3016 levels do notspecify or imply hierarchy in terms of relative merit, technology sophistication,or order of deployment. Thus, J3016 does not specify or imply that, forexample, level 4 is "better" than level 3 or level 2.)。
第六个问题:如何描述一辆装备了自动驾驶汽车的能力或者水平呢?
答案是:用Level+设计使用条件的方式进行规格说明。
这个规格说明就是要说清楚“在什么条件下,能怎么用的”。
美国高速公路安全管理局(NHTSA)在AutomatedDriving Systems (ADS): A Vision for Safety 2.0.中,明确说明设计使用条件必须至少要包含如下参数的说明:
a.道路类型
Roadway types (interstate, local, etc.) on which the ADS isintended to operate safely;
b.区域范围
Geographic area (city, mountain, desert, etc.);
c.速度范围
Speed range;
d.环境条件
Environmental conditions in which the ADS will operate(weather, daytime/nighttime, etc.)。
因此要规范的描述系统的能力就必须(1)用Level来说清楚你能做什么,(2)用规格来说清楚你在什么条件下可以做。
此外,标准认为同一个系统可以具备L2+XX的规格,也可以具备L3+xx的规格,当然也可以具备L4+xx的规格。
第七个问题:L4高级吗?
比较的话,首先把L0、L1、L2去掉,因为这些只是驾驶自动化系统,驾驶自动化系统的L3、L4、L5才能叫自动驾驶系统。
然后再把L5去掉,因为L5叫做没有任何条件限制的自动驾驶,这个几乎不可能,它属于L4的使用条件趋于无穷时的状态。
那么其实只需要比较L3和L4就好了。
答案很简单:
1)L4与L3在责任方面有一个质的提升。对于L4来说,从自动驾驶开始运行的那一刻,车上不需要有司机,所有驾驶的责任都在系统。对于L3来说,当自动驾驶系统告诉你不行了的时候,你必须做回司机,同时责任也从系统转移到了司机身上。L4在责任方面,绝对比L3高级。
2)在技术方面,如果使用条件一致的情况,L4比L3高级。因为L4在自动驾驶系统不能正常运行的时候,可以自己处理,采取它认为的风险最小化的方式处理,比如靠边停车。也就是说L4比L3高级的地方是它在自动驾驶系统不行的时候,还能以它认为的安全方式把车辆自动驾驶到一种它认为安全的状态。
3)问题来了:怎么才是风险最小化,又怎么去衡量?L4认为的风险最小化的方式就是风险最小化的方式吗?你能认同吗?它在自动驾驶系统不行的时候,还要去自动驾驶一段时间,你能接受吗?
简单来说,L4比L3多了一项把死马当活马医的招数。咳咳,但是我认为,如果马真死了,还是下马做步兵的好,就不要再骑着走两步了。可惜的是,L4允许老弱病残孕骑马,他们是做不了步兵。
(3)阿波龙是L4吗?
这个不太容易确认,也不需要确认,他如果声称是L4那就把L4的责任给他好了,我想,如果告诉他只是责任的转移,他可能就不说自己是L4了。
那么我们只能从技术的角度来分析,阿波龙是否能够完成L4的任务,特别是自动驾驶系统失效时的最小风险处理。
答案是显然的,我觉着不能,证据只需一条:阿波龙的车上有紧急停车和缓行停车按钮。
这个证据表明:
第一、阿波龙的系统还需要一个安全员的角色,不管这个安全员是专职的,还是吃瓜乘客临时客串的,这都不是L4级别的概念了,甚至都不是L3的概念,因为他需要安全员来监控行驶环境
第二、自动驾驶失效时,用紧急制动或者缓行制动来代替最小风险处理是非常低级的,并且这是一个隐含了巨大风险的最小风险处理。
至于100台算量产,就当个笑话好了,量产和辆产有区别吗?不知道,至少在发音上是一样的。
(4)老乡要看的什么样的L4
封闭环境也好,半封闭环境也好,都不是老乡们要看的L4。从美国的标准以及立法推进历程来看,老乡要看的是On-Road Motor Vehicles,特别想看的是乘用车和商用车,J3016的标准也主要是给这些车的制定的。J3016给出了“On-road”的解释:“On-road”refers to publicly accessible roadways (including parking areas and privatecampuses that permit public access) that collectively serve users of vehiclesof all classes and driving automation levels (including no driving automation),as well as motorcyclists, pedal cyclists, and pedestrians。
简单一句话,在公共道路或者公共服务区域行驶的社会车辆才是自动驾驶的主战场。公共道路交通环境下的自动驾驶技术才是要解决的核心点。
落地是必须的,但要落在跑道上,否则机毁人亡。
当然如果你有降落伞,也可以伞降,AI不就伞降成功了吗?
AI的夏天之AI的一个Father
进入20世纪以来,探索人类心智的这一科学问题,就是如同一架飞机一样,一直在天空中飞着,它一直在寻找合适的跑道降落。
在这架飞机上,有人说装着控制论、信息论和自动机;有人说装着哲学和逻辑,装着用数学打扮过的形式主义;有人说装着来自对生命认识的神经生理学、进化与遗传等计算主义;也有人说装着来自工程领域的自动机、计算机、通信与反馈、统计与概率的实用主义。
但这些都不重要,重要的是,突然有人喊:McCarthy同志跳伞了!
McCarthy同志的确跳伞了,它之所以伞降,是因为它看见了计算机,它想用它做点什么,它厌倦了关于自动机、控制论那些深奥的讨论,他想搞点别的来达到这个目的。与其讨论心智是什么,不如用机器做出来,他心里这么想着,至于怎么做,他没想好,他只是觉着应该能做出来点什么,并且应该要用到计算机这个工具。
为了让大家一起跟着他闹革命,他决定开个会。
1956年8月,霹雳咔嚓一声雷,这个叫AI夏令营的会议就召开了。这个会议就像1921年在上海的一艘小船上开的会一样,参会的人没有任何一个人会预见到后来,后来也没有任何一个人能记住这个会是什么样子,特别是在全程参会的只有McCarthy、Minsky和Solomonoff这三个人的情况下。
所以,AI的历史还要往前写,Father的帽子还不能给McCarthy这个组织会议的人,尽管也是他杜撰了这个词。
就像不能把伟大的帽子给一大的老班长独秀一样,我们需要找到Max,这样才足够伟大,于是乎壮大了的子孙后代就要给自己找了个好出身,就要寻找到了一个Father。这个Father就是图灵,就像我们找到了孙文同志一样。孙文是最大的共识,图灵也是。
很多与AI有关的后人把图灵做父亲的那一刻定位在了1950年,因为这一年它在一个叫Mind的哲学期刊上发表了一篇叫《Computing Machinery andIntelligence》的文章,它在这篇文章里最让后人乐道的是图灵测试。甚至有些后人把这个图灵测试视为机器是否达到人工智能的标准。
其实呢?其实这篇文章的主要是针对“机器能不能思考”,“用计算机如何构建能思考的机器”进行了思辨,图灵测试只是一个辩论的技巧。
在抛出Can machine think?的问题时,为了怕其他人咬文嚼字,在machine和think的定义里挑骨头,图灵开篇给出了个游戏,他说如果在这个游戏里机器能表现的比人好,那么机器就应该可以被认为是能思考的。这个游戏就是在party上通过谈话猜测是男是女的游戏。这个思路巧妙的规避了能思考的机器的定义,避免了其他人的穷追猛打。他深知文人相轻,所在他要在建设好防守阵地后,再开始相轻别人的伟业。
之后,他介绍了计算机是什么,并论述了计算机来构建这样的思考机器的可行性。随后开始一一反驳了各种认为机器不能思考的观点,尽管这些反驳被视为经典,但如同诸葛同志的舌战群儒一样,只有反论,没有立论是不行的,必须要说我家主公还有好几万人马呢,曹操号称百万实则二三十万,咱们合起伙来不比他人少,且咱们占尽地利,肯定打的赢。图灵也认识到了这一点,于是他再反驳完后说:
The reader will have anticipated that I have no very convincingarguments of a positive nature to support my views. If I had I should not havetaken such pains to point out the fallacies in contrary views.Suchevidence as I have I shall now give.
这段话翻译过来就是:读者朋友们,你们看到了,我没能从正面的论述来支撑我关于机器能够思考的观点,如果有,我也不必强词夺理的去反驳那些反对的观点了。但是,其实,我是有的,我现在就让你们看看。
然后图灵摆出8个大字:
好好学习一定能天天向上!
是的,写到最后,他终于留出了两三页,写了用Learning machine来实现machine think的观点。
说实在的,这样文章也只能发表在社科类读物上,它并不像后人描述的伟大的不得了,伟人不是处处都伟大的,图灵的伟大,不在这里。他的立山之作是1936年发表的《On Computable Numbers, with an Application to the Entscheidungs problem" 》。
这是一篇“我将我心付数学、奈何数学照Comupter”的文章,这也是一篇让计算机的后人称图灵为计算机Father的文章,同时也是包含了初生的AI里最主导的基因的文章。
如果非要把图灵认为是AI的father,那最好是回到这篇文章,而不是Computing Machinery and Intelligence那篇,因为这篇是被搞数学的人们认可的文章,且图灵也是个数学家。
-
AI
+关注
关注
87文章
26405浏览量
264006 -
自动驾驶
+关注
关注
773文章
13018浏览量
163185
原文标题:自动驾驶的冬天?
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
未来已来,多传感器融合感知是自动驾驶破局的关键
LabVIEW开发自动驾驶的双目测距系统

自动驾驶“十问十答”

带你探索吹风筒的前世今生【其利天下高速风筒方案开发】

农机自动驾驶显示系统组成部分以及配置
【KV260视觉入门套件试用体验】八、VITis AI自动驾驶多任务执行MultiTask V3
自动驾驶中的机器学习

自动驾驶基础架构
汽车自动驾驶等级


探讨自动驾驶系统感知系统





 工商网监
工商网监
评论