 自动驾驶车会比普通车舒适的原因分析
自动驾驶车会比普通车舒适的原因分析
不少人认为自动驾驶车的舒适程度肯定会大打折扣。驾驶员一旦由人类换成了机器人,很可能会经常急刹车或是无法稳定控制车体。更何况,没有了人类司机,乘客也许心理上会感到不安全,也很有可能晕车。
但大家不要忘了,自动驾驶车是为了智能出行重新定义的,从车辆控制到车内设计,以上这些问题工程师们自然会逐一帮你解决。
我们来重新定义“舒适”。
下面这张图里,蓝颜色的区域代表传统汽车对舒适的定义。基本分为:车内空气质量、噪音、温度以及震动。这些都比较容易理解。
我们再来看红色区域,也就是自动驾驶车对舒适的定义。
Naturality:驾驶路线是否自然。很多人类新司机开车会让人感觉很僵硬,特别是在转弯、变道的时候。也就是说他们选择的路线不够自然。这一点和自动驾驶车的规划(planner)直接挂钩。
Disturbances:对干扰的控制。干扰分为两种。第一种来自路况的干扰,比如坑洼不平的路面。这种干扰一般造成的是垂直方向的颠簸,频率比较高,但颠簸程度比较小。自动驾驶车会设计特殊的座椅,尽量减小颠簸程度。同时也可以探测到路面上明显的坑洼,提前躲避。
另一种干扰是驾驶本身给乘客带来的干扰,是由于加速度、刹车带来的前后方向的晃动和转向时带来的左右方向的晃动,也就是“jerk”。这一点是很多自动驾驶公司正在解决的难题。不但要做好车体控制、路线规划,同时要探测周围路况,加快运算速度,给出最佳、最快的驾驶决策,从而避免过快加速或是急刹车。
Apparent Safety:也就是人类乘客心理感受到的安全程度。即使自动驾驶车行驶得十分安全,但是如果人类乘客心理上觉得距离前面的车太近,或是觉得速度过快,甚至是挑选了一条不太安全的街道行驶,也仍是不合格的驾驶体验。
因为人类的标准很难量化,这一领域仍需要大量研究。比较简单的解决办法是,找到更多的人类公认的老司机来驾驶自动驾驶车,把他们的数据作为“黄金标准”作为对比,从而调整机器人的路线。
墨尔本皇家理工大学的震动实验室
Motion sickness:晕车。人类如果自己开车,一般不太会晕车。但是如果作为乘客,坐在车里一直盯着手机,就很容易晕车。
解决办法:
为乘客在车内提供路线信息屏幕。研究证明,信息可以给人类一种安全感。如果屏幕上显示5秒之后汽车会右转,乘客心理上就会有所准备,晕车程度就会减小。
保证车厢有足够大的窗户。乘客如果能经常望一望窗外,就不会只盯着手机或是其他不会移动的物体,就能减小晕车的感觉。
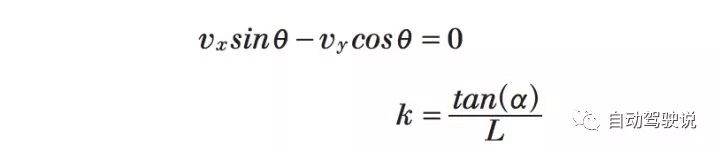
运用横向控制以及连续曲率。除了上述的油门和刹车问题,方向盘把控不好的司机也很容易让乘客晕车。下图是规划中常用的自行车模型。k就是曲率。有连续性的曲率可以减少向心力的变化,从而能增加舒适感。
自动驾驶车需要做大量实验,衡量乘客在车里坐的时间和疲倦程度,身体是否会随着车的颠簸或转弯有强烈晃动,是否感到紧张,是否可以长时间执行一些活动,比如看手机、读书、甚至小睡一会,是否会有不适感。
-
机器人
+关注
关注
206文章
27015浏览量
201357 -
汽车电子
+关注
关注
2998文章
7440浏览量
161559 -
自动驾驶
+关注
关注
773文章
13021浏览量
163185
原文标题:为什么自动驾驶车会比普通车舒适
文章出处:【微信号:zidongjiashishuo,微信公众号:自动驾驶说】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【mBot申请】自动驾驶车
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?
自动驾驶真的会来吗?
细说关于自动驾驶那些事儿
自动驾驶的到来
车联网对自动驾驶的影响
如何让自动驾驶更加安全?
自动驾驶车的人车交互接口设计方案
UWB定位可以用在自动驾驶吗
网联化自动驾驶的含义及发展方向
PLC在普通车床C650控制中的应用
普通车和自动驾驶车发生碰撞的原因分析






 工商网监
工商网监
评论