 如何解决角度误差过大而无法精确定位
如何解决角度误差过大而无法精确定位
汽车航位推算(DR)导航系统采用一个陀螺仪(gyro)来推算车辆的即时航向。借助该信息再加上行驶的距离,导航系统可以正确确定车辆的位置,即使卫星信号因拥挤的城区环境或隧道而受阻时亦是如此。在 DR 导航中使用陀螺仪的一个重大挑战是,卫星信号可能会丢失较长时间,结果使累积角度误差过大而无法精确定位车辆。本文为这个问题提出了一种简单的解决办法。
DR 导航的工作原理
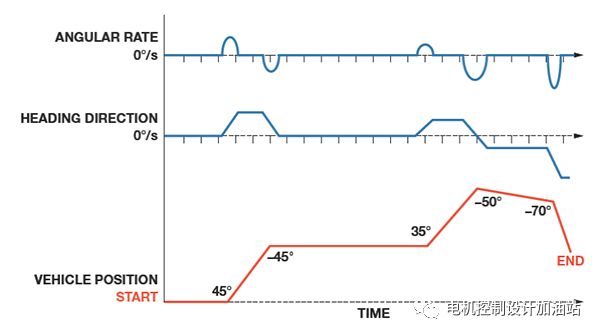
图 1 所示为 DR 导航的基本工作原理。一个陀螺仪测量车辆的旋转速率,单位为度/秒。代表车辆即时航向的角度通过计算旋转速率的时间积分而求得。结合航向和行驶距离,可以确定车辆的位置,如图中的红线所示。
使用数字陀螺仪时,积分速率可以表示为速率样本和与采样间隔之积:
其中,ri 为陀螺仪检测到的速率,n 为样本数,τ 为采样间隔。随时间累积的角度误差可以表示为:
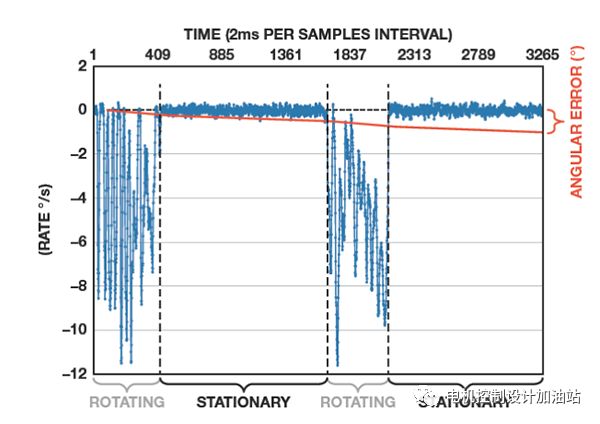
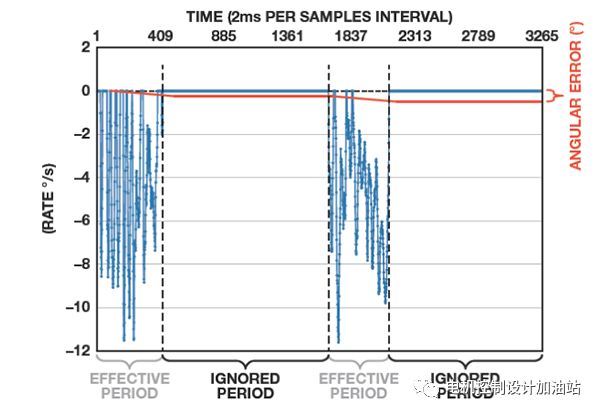
其中,ei 为各样本的速率误差, n 为样本数, τ 为采样间隔。根据该公式,随着所需积分时间变长,累积误差变大,如图 2所示。这些速率样本(用带 ADXRS810 高性能角速率传感器的评估板测得)模拟的是共含有 3300 个速率样本的 DR 导航系统。蓝线表示陀螺仪速率样本;红线表示累积角度误差。显然,累积角度误差随时间而变大。
用低通滤波器(LPF)缩短积分时间
降低角度误差的传统方法将重点放在减小 en上,但当今的数字陀 螺仪的速率误差规格已处于非常低的水平。例如,ADXRS810 的灵敏度为 80 LSB/°/秒,失调为±2°/秒,抗冲击性为 0.03°/秒/g ,改善空间有限。另外,en 的补偿算法非常复杂。与诸如电子稳定控制(ESC)等其他应用相比,DR 导航系统中的陀螺仪可以长期运行,例如车辆行驶通过长隧道时 GPS 信号就不会丢失。在 DR 导航应用中,较长的运行时间会导致角度误差变大。
如果可以缩短积分时间,则可以显著降低累积角度误差。当陀螺仪不旋转时,速率输出较小,但因陀螺仪噪声的影响,输出不是零。ADXRS810 具有超低的陀螺仪噪声和超高的灵敏度,只需设置相应的阈值,即可轻松过滤掉数字域中的噪声。这一过程等效于低通滤波,因为与旋转导致的速率输出相比,陀螺仪速率噪声处于高频区。
图 3 所示为图 2 的 LPF 版本,其中,小于 1°/s 的所有速率样本均归零处理,因此在速率积分时忽略不计。剩下的积分时间,被认为是有效积分时间,只相当于总积分时间的 16%左右。如此可以大幅缩短积分时间。结果,累积角度误差也显著降低,如图中的红线所示。
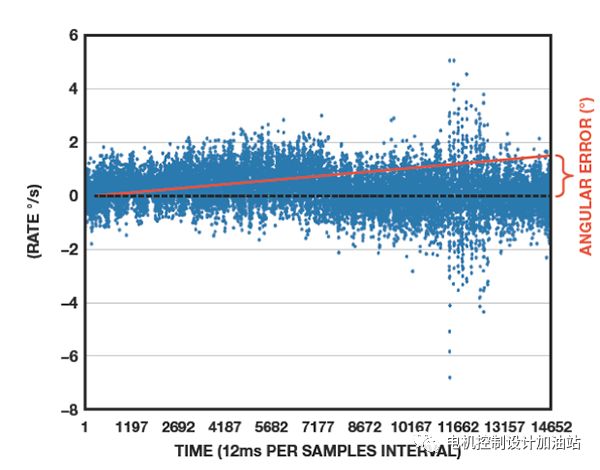
在实际应用中,车辆方向盘一般位于零度处。因此,可以通过忽略来减少陀螺仪速率的有效积分时间,如图 3 所示实验中所做的那样。图 4 所示为来自真实车载测试的陀螺仪速率样本。
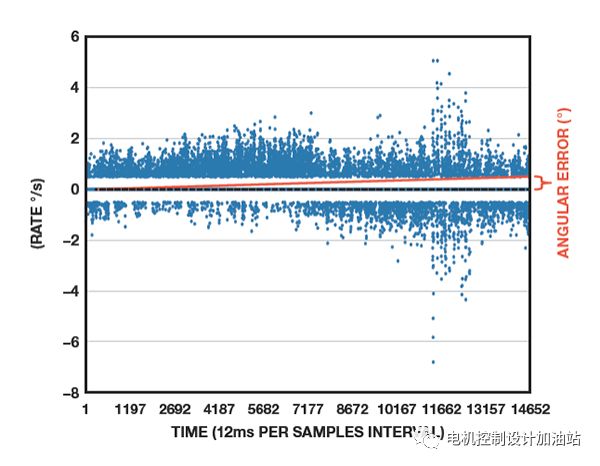
在隧道中行驶大约 180 秒,则需要 180 秒的速率积分时间。如果不使用 LPF 过程,则 180 秒内累积的误差可能高达 4°,该值太大,导致无法正确确定车辆在隧道中的位置。采用 LPF过程,将阈值设为 0.5°/秒,则有效积分时间缩短至 84 秒,减幅达 53%左右。累积误差降至约 0.5°,如图 5 所示。设置 LPF阈值时,可以根据具体应用所需要的精度来定。
结论
如今的数字陀螺仪具有出色的规格特性,因此,其性能的提升余地有限。在车载 DR 导航系统以及要求长积分时间的其他应用中,通过设置 LPF 阈值来缩短积分时间是一种简单但有效的精度提升方法。
ADXRS810 高性能、低成本数字陀螺仪采用 ADI 公司的新型MEMS 技术,是车载 DR 导航应用的上佳选择。该陀螺仪采用超小型封装,具有低失调、低噪声和高速率灵敏度的特点。采用芯片集成温度补偿技术,无需使用外部温度传感器,同时简化了温度补偿算法。其超高的抗冲击和抗振动能力对汽车应用具有十分重要的意义。
作者简介
Ben Wang [ben.wang@analog.com]是 ADI 公司中国深圳的现场应用工程师(FAE),毕业于湖南大学。他于 2009 年 6 月加入 ADI 公司,此前在National Semiconductor 工作过六年。
-
汽车电子
+关注
关注
2998文章
7445浏览量
161560 -
精确定位
+关注
关注
0文章
9浏览量
11760 -
数字陀螺仪
+关注
关注
0文章
4浏览量
5940
原文标题:缩短积分时间可以提高航位推算导航系统的精度
文章出处:【微信号:motorcontrol365,微信公众号:电机控制设计加油站】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
伺服电机的精确定位方法及分类简介 | 步进电机驱动器细分评定

电缆行波故障精确定位装置:电力线路的守护者
伺服电机的精确定位方法
填充宽度对于精确的焊盘填充过大的影响
伺服位置误差大的原因 怎么解决伺服电机定位误差过大的问题?
如何解决永磁同步电机气隙过大的问题?
晶振频率偏差过大怎么办?教你如何解决晶振频率偏差过大问题
博途触摸屏下载时提示缺少面板映像如何解决?

隧道人员定位系统:区域定位、ZigBee3米精确定位系统与UWB30厘米精确定位
请问更换带编码器的电机后需要做哪些工作才能实现原来设定位置的精确控制?

无法定位labview运行引擎怎么办
阿童木增量式磁栅编码器与折弯机精确定位技术的完美结合

三菱FX5U如何控制伺服精确定位






 工商网监
工商网监
评论