 保时捷911后轮转向技术深度解析
保时捷911后轮转向技术深度解析
保时捷911之所以是保时捷911,是因为在她身上有着半个多世纪以来的不断传承和完善与进步,这使得她的魅力50年来经久不衰。在2014年开始,保时捷在911上采用了Rear axle steering后轮主动转向,这一新技术的加入,为911带来了什么呢?“等等!后轮也能转向?”没错!赶紧看看这是怎么回事吧!
由于保时捷911是后置发动机的布局,所以前轮部分的重量不足导致了车辆偏向于转向不足。
为了对其进行改进,在991开始,保时捷对911车型的轴距加长,使更多的负载能转移到前轮部分。
但是由此带来的问题是,轴距越长,车辆的的灵活性就越差。为了弥补这一缺陷,保时捷决定引入后轮转向这一技术。
在保时捷911 GT3和911 Turbo的配置表里,都有着“Rear axle steering(后轮转向)”这一栏,在2014年起,保时捷911 GT3和911 Turbo 都标配了Rear axle steering后轮转向系统。
保时捷911所采用后轮转向技术是通过后轮角度的改变来辅助调整整车的转向特性,从而提升车辆稳定性和灵活性,使车主在驾驶时可以更加从容。下面我们来看看后轮转向是怎么工作的。
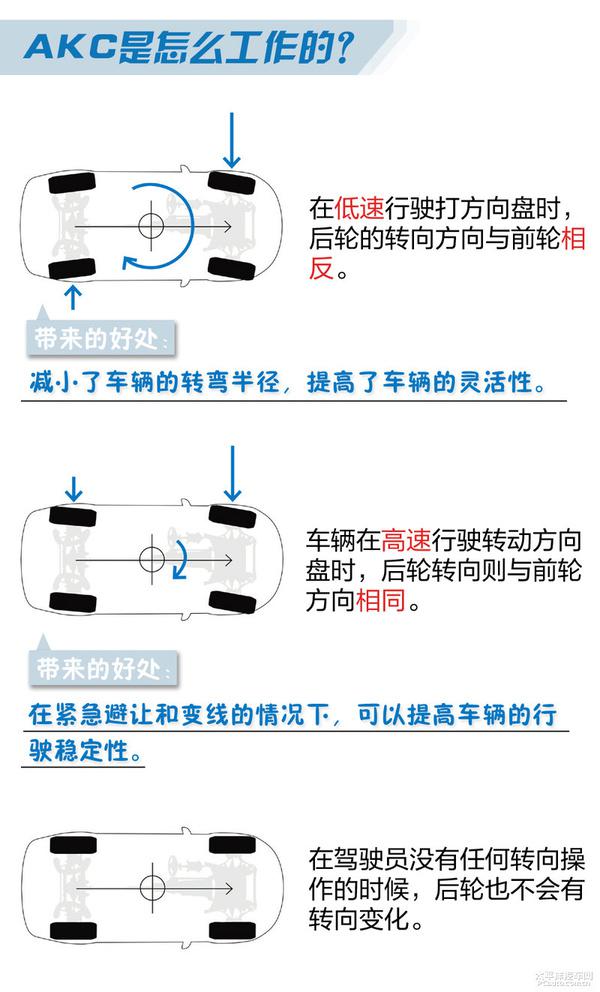
所以后轮转向这个技术的引入不仅实现了低速灵活性,同时也实现了高速时的稳定性。
下面我们从一组视频更加清晰地了解后轮转向系统。
●第一种情况
低速转弯
这种情况想必很多车主都遇到过,在一些车位比较短小的停车位上想要出来,我们可能得打好几把方向,非常麻烦,一不小心还容易出现磕碰。
但是如果车辆配备了后轮转向系统,那么这种情况下出库就变得简单了。
在低速(时速<50km/h)转弯时,后轮根据情况转向,最大转向角度为3°,并且转动方向与前轮相反,获得更小的转弯半径,以此来协助车辆转弯。
经过实测,这种方式可以将汽车的转弯半径减小10%,使其更容易通过繁杂的城市路况和进出窄小的停车位。
同时,因为减小了转弯半径,在以同样的速度过同一个弯角时,搭载了后轮转向系统的保时捷911能以更小的方向盘转动幅度通过。
●第二种情况
高速变道
在高速行驶的时候(时速≥80km/h),通过后轮的角度变化能使保时捷911操控起来更加稳定更加安全。
因为在高速情况下,搭载了后轮转向系统的保时捷911后轮与前轮的转动方向相同,这就形成了轴距延长的操控效果,使得车辆在高速行驶时更加稳定。
虽说AKC的名字叫主动转向控制系统,但是它所指的主动转向只是相对于雪铁龙的后轮随动转向技术来说是主动控制的,但是并非受驾驶员控制,而且只能允许与前轮相比有很小幅度的转动。
如何实现后轮转向?
AKC后轮转向主要是通过电机控制两后轮的拉杆进行伸缩,改变后轮前束,实现后轮转向。在这套系统里面,电机的起到非常关键的作用,它需要收集一系列的车辆信号,例如转向、车速等,然后分析什么时候转向、该转多少、转哪个方向,这都是需要ECU给出指令,电机负责执行。我们还可以从以下外媒的实拍视频很清晰地看到911 GT3是如何实现后轮转向的。
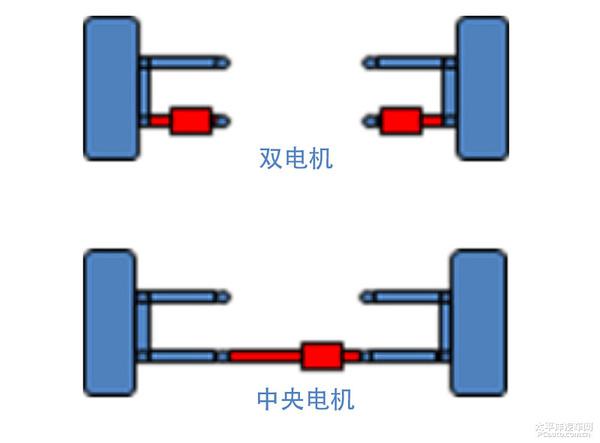
●两种结构
911和panamera的不一样
保时捷911所搭载的后轮转向系统有两个电机执行器,这与panamera的后轮转向结构有所不同,panamera的后轮转向只靠一个中央电机控制两边车轮,而911 GT3、911 turbo所标配的后轮转向系统是两边车轮各有一个电机,这样相比中央电机来说控制会更加精准。
总结
后轮转向的技术在很早之前就被运用在民用车上,但是迟迟没有普及的原因有很多,包括成本上的因素、ECU控制逻辑上的匹配以及对悬挂重量有所增加而带来的其它问题等等。但是需要说的是,这个技术确实已经非常成熟。通过驾驶带后轮转向技术的保时捷911,你可以清晰地感受得到它所带来的惊艳表现,以及安全感。
-
发动机
+关注
关注
33文章
2317浏览量
67427 -
保时捷
+关注
关注
1文章
182浏览量
17656
发布评论请先 登录
相关推荐
深度解析深度学习下的语义SLAM

2016款保时捷911 GT3 RS车发动机异响

保时捷计划推豪华电动版Panamera,并保留Taycan
前轮、后轮反馈控制算法介绍
最强科普!深度解析华为云盘古大模型
4WS系统电控部分的组成
基于汽车电子控制技术的四轮转向系统分析
四轮转向系统结构及工作原理
基于汽车电子控制技术的四轮转向系统
线控转向技术路线的优点
自动驾驶:车辆转弯半径计算

自动驾驶4WS车辆路径跟踪最优控制算法仿真





 工商网监
工商网监
评论