 三款日系SUV关注度颇高的车型对比,谁是你的菜
三款日系SUV关注度颇高的车型对比,谁是你的菜
奇骏上市后终于让很多人做出了最后的选择,在它和RAV4、CX-5之间找到一款最适合自己的车。而这三款紧挨着上市的SUV在CR-V逐渐老去之后,也将撑起日系车的新格局。在全新一代的车型中,奇骏和RAV4的风格更接近且实力更强,而CX-5作为“新人”的关注度也并不低,“选择恐惧症”的人恐怕真的要纠结了。不过就算它们的定位比较接近,我们也会找出哪款更适合你。
备注:由于测试车辆出现问题,此次CX-5的测试车为2.0版本,所以在动力上的感受将以2.0车型为准。并在测试环节附上之前对2.5的实测数据,以供参考。
● 为什么是这三款车,为什么没CR-V
在日系SUV中,奇骏、RAV4、CX-5这三款车分别代表了三个品牌最新的设计水准,对于追求新车型和性价比的消费者来说,恐怕绕不开在这三款车间选择。主导韩系车的ix35和智跑迟迟没有改款,途观、翼虎实力派在价格方面又不占据优势,这也让这三款日系SUV成为了关注度颇高的车型。异常接近的价格、相似的配置,让它们之间的较量在所难免。
尽管目前CR-V的销量依然超过这三款车型,但从产品本身来说,在我们去年的《越野时代》中,CR-V已经占不到优势。如果以性能、工艺以及娱乐系统这些常用的地方对比的话,对CR-V难免不公平。当然, CR-V并非不推荐购买,看看它的销量就知道了。而且CR-V也是这三款车型中暴露问题最少的,算是个踏实之选。这三款车的共同目标恐怕也是把CR-V拉下马。
● 改款后有哪些重要的改变?
奇骏最重要的变化有两点,一是设计风格转向城市化,以扩大受众人群;二是提升乘坐体验,舒服宽敞的空间本来就是日产的强项,在老奇骏上没体现出来,新奇骏不会坐视了。
RAV4重要的是风格转变,第一是视觉上的,这是丰田和雷克萨斯的共同方向,外观和内饰的设计越来越激进。第二是体验上的,RAV4在尽力追求驾驶性能上的突破,尽管受限于丰田的传统而有所顾忌,但是这种突破也是前所未有的,“躁动”的感觉出现在了RAV4上。
CX-5作为一款全新车型,谈不上“改变”,它要做的是以什么样的定位迎战对手。在这个都在以实用性为主导的市场内,CX-5依然坚守自己的品牌传统,根本没把实用性放在第一位。CX-5体现的依然是运动性,就是为了满足那些对驾驶有要求的消费者。
● 三款车的最大特点?定位人群有哪些区别?
奇骏的优势在于舒适性、空间以及越野性能。这三个标准放在一起,恐怕只有奇骏能满足了。但它实在没有值得一提的操控性,比较适合日常代步或者自驾游的需求,尤其长途的话它会是最佳选择
RAV4的特点还是“均衡”,操控性和舒适性依然结合的很好,空间方面够强势,行驶稳定性也不低。奇骏做不到这种均衡,CX-5也做不到。但RAV4有点不安分,驾驶起来有点过度敏感,不知道你喜不喜欢?
CX-5的亮点在于同级最好的操控性和燃油经济性,空间是它的劣势。这是一款完全呈现年轻化的车,和奇骏、RAV4的风格截然不同,年轻人会更喜欢它。它的问题是不适合载人,后座的乘坐体验和它的驾驶乐趣成反比。
● 外观:大胆和保守 怎样会更吸引人?
城市SUV的设计理念在这三台车上被发挥得淋漓尽致,尤其是奇骏在保留了力量感的同时变得漂亮多了,并且尺寸上占据绝对优势,当然,视觉效果也是最大的。RAV4则完全跟随着雷克萨斯的设计潮流,看上去最为激进。倒是一贯擅长设计的马自达在CX-5上没有体现出太多“特色”,不过好像大家对CX-5外观的“差评”也是最少的。
从左到右,你会发现视觉重心越来越高。尤其是CX-5和RAV4相比,简直像是轿车和SUV的区别。奇骏的设计相对合理一些,就是常规的SUV造型,看上去反而也更像“SUV”。
奇骏拥有最大的车身尺寸和离地间隙,车身轮廓也依然保留了SUV该有的味道。RAV4和CX-5则看上去更“城市”一些,CX-5看上去最小,但它的车身参数并不比RAV4差,相反还有优势。
尾部设计本不是RAV4出彩的地方,甚至看上去有些单薄。但是,奇骏在这方面“更进一步”,更高的尾灯配上紧凑级车本来不大的宽度,车尾看上去比较窄。在这方面,RAV4和奇骏都需要时间适应。CX-5的“保守”反而让它的车尾看上去是最和谐的。
编辑点评:不看尾部 奇骏最有SUV的范儿
奇骏从设计上要比RAV4更成熟一些,没有过分追求“躁动感”,这比较符合日产的风格。工程车造型的老奇骏换代后,新奇骏并没有失去硬朗的感觉。倒是尾部的设计,尤其是尾灯并不讨好,看上去像是在为一直被自主品牌模仿的丰田进行回击。看来RAV4只能偷笑了。
编辑点评:RAV4的突破性最大
RAV4是这三台车中接受起来最有难度的一个,对它的评价基本就是两个极端,美或丑。事实上丰田最新推出的车型都面临着这个问题,卡罗拉、威驰也足够挑战和改变大家对丰田的传统印象。哦,还有雷克萨斯NX。这样的丰田,你喜欢吗?
编辑点评:CX-5的设计最匀称 但怎么看着那么小
CX-5没有任何让人觉得华丽的地方,倒是体现了马自达难得一见的朴实。所有设计都是马自达的标准元素,整体效果很不错。吃亏在它的尺寸不小,但看上去太小了。很难让人觉得它竟然是和奇骏同一级别的。
● 内饰设计与工艺:
作为SUV车型并且互为竞争对手,三台车的内饰确是截然不同的风格,受众人群也会有所区别。不过不仅如此,在内饰工艺、驾驶员感受方面,三台车对于内饰设计的理解也表现出了品牌间的不同理念。
奇骏的内饰可以说是标准的日产风格,设计上延续了天籁、轩逸所代表的日产最新的设计风格。配色是日产经典的浅米色,延续了之前居家风格的感觉,但通过一些木纹内饰,钢琴漆的搭配,内饰的质感提升了不少。特意要提的是,奇骏所使用的木纹内饰仿真度非常高,这在一定程度上增加了车内的豪华感。总之,设计师很聪明地用了一些常规的材质,让奇骏的内饰表现出了档次感,这点比RAV4聪明。
奇骏的坐姿很高,标准的SUV视野,座椅可调范围不大,基本就是让你保持这个姿势。车内的空间感很大,是三台车中最宽敞的。
RAV4的内饰是最有设计感的,硬朗且追求层次感的造型走的是雷克萨斯的风格。用料很猛,车内大面积铺装了皮革材质,豪华感直线飙升。不过在非铺装皮革地方,RAV4的材料显得颗粒感较强,这相比奇骏和CX-5来说显得不够好,
RAV4的座舱偏向于运动,座椅可调范围非常大,这和奇骏正好相反。相比起来,RAV4显得更全能,像SUV一样开可以,想要LOW也做得到。
CX-5的内饰设计丝毫没追求“大气”,造型就比较偏向小巧、运动,加上马自达向来喜欢“素范儿”,所以在CX-5上见不到奇骏和RAV4的豪华感。但是,车内选用的材质不错,触感都很细腻。
CX-5的车内空间较小,视野也并不“高大上”。不过它的驾驶感很强,包括方向盘也很小巧,你能很容易感受到马自达那种独特的运动风格。
● 人机交互系统:处于同一水平线
在这一环节,三台车表现出了惊人的一致性,你甚至可以理解为这是当前日系车的统一水平。三套系统大同小异,都是按钮与触摸屏的组合,操作方式区别不大。人机工程学设计稍有差别,奇骏稍好一些。CX-5和RAV4的内容显示非常小,触摸操作的便利性不如奇骏的大图标。另外,三个液晶屏的显示效果都不算好,可是角度有限,强光下都会出现看不清屏幕的问题,这方面做得最好的还是翼虎的SYNC系统,这三款车与其相比还有不小的差距。
奇骏和RAV4都配备了全景天窗,不同的是RAV4采用了分离式天窗,或许叫双天窗更合适。马自达则全系没有全景天窗。
奇骏和RAV4的天窗比起来,奇骏显然更好。天窗面积更大,且遮阳帘为电动开启的。RAV4采用了两块分离的天窗设计,也算是全景天窗,只不过遮阳板采用了手动开启,比奇骏稍显麻烦一些。
● 奇骏:沙发级的座椅 前后排都是一样的享受
奇骏的座椅比老款更强调舒适性,完全是按照天籁的标准设计的。座椅的尺寸和填充物都是最好的,这就是完全为舒适性打造的座椅。相反,它不太注重包裹性,这和RAV4正好相反。不过,这正是奇骏的风格,舒适是第一位的。
后排座椅的乘坐感受和前排一样,舒适性很高,腿部空间也很宽敞,比老款提升的空间非常大。唯一不足的是靠背角度不能调节,这是非常遗憾的,否则它在这个环节可以完胜另外两位了,而RAV4恰恰是赢在这里。
● RAV4:前排座椅走进了包裹性的误区 后排舒适性最佳
反观RAV4却和奇骏截然不同,座椅看上去很单薄,有点锐志的作风。不过坐上去并不硬,还是留有丰田的舒适性的。问题在于座椅太强调包裹性了,胖人坐进去会很难受,在加上靠背比较软,结果就是“出汗”,这个特性很像雷克萨斯IS。但从RAV4的受众人群来说,大可不必这样。
后排是RAV4的亮点,座椅看上去真的不显档次,但坐上去却要比奇骏还舒服。坐垫比奇骏要更贴合身体,对大腿的支撑更好。另外,它的靠背角度可以进行大范围调整。好想睡觉!
● CX-5:标准的运动型前座椅 轴距都去哪了?
CX-5的座椅和马自达的其它车型一样,标准的运动型座椅。坐上去虽然没有RAV4柔软,但对于包裹性的理解要比RAV4透彻,坐上去不会被夹的难受,侧向又能提供有力的支撑。
和前两位相比,CX-5好像根本没有考虑过后排乘客的感受,乘客就像小学生一样笔直地坐着。另外,后排腿部空间狭窄,以至于上下车门都比前两位困难。很难相信,CX-5和奇骏的轴距只差7mm。
● 城市SUV的必考科目:公路行驶性能
在这次对比中,没有绝对的赢家,价位相当的三款车各有优劣。前面表现不佳的CX-5在这一局将彻底逆袭,似乎它更像是个局外人,站在一旁看着奇骏与RAV4的争斗。但是,别高兴的太早。
● 日常驾驶感受:CX-5操控最佳 奇骏和RAV4偏向舒适
奇骏给人的惊喜来自于动力系统,加速感觉比RAV4更快一些,尤其急加速的时候绝对令人满意。当然,CX-5的2.5排量也很出色,这里面表现稍差的是RAV4,急加速的表现不如奇骏,但它的油门反应真是比奇骏快得多了。
奇骏一成不变的是它的转向系统,它和任何一台日产车都没有区别,转向依旧模糊。不过力度还不错,比之前的日产车精致了一些,这一点微不足道的改进还是很有必要的。RAV4的转向同样延续了丰田缺乏路感的特点,而且油门初段过于灵敏和刹车初段力度不足的现象也一并延续。总之,这两款车在日常驾驶时各有特点,奇骏的质感更好一些,但转向和车身稳定性不如RAV4。
马自达很重视驾驶乐趣的感受,这也是目前合资的日韩系车中最具有驾驶感的一款车,它和翼虎、途观的风格更接近。转向系统和底盘的结合给你感觉更接近于轿车,驾驶起来很紧凑也很顺畅。但是,马自达的工艺并不突出,车内的噪音和舒适度控制得不算好,从代步的角度考虑,奇骏和RAV4的优势更突出。CX-5更适合对驾驶有要求而愿意放弃乘坐体验的人。
● 操控性对比:惊喜!RAV4也可以甩掉奇骏
从单纯的操控性来看,CX-5毫无疑问是最好的,可以轻松甩掉对手。尤其是从奇骏换到CX-5上,你会感觉好像按了快进键,每个动作都要快了很多。这在我们去年的《越野时代》麋鹿测试中已经对CX-5有过很高的评价,RAV4和奇骏在紧急操作下的灵敏性远不及CX-5。老奇骏如是,新奇骏亦如是。
而奇骏的表现垫底似乎也是没有悬念的了,它的转向系统根本不适合在多弯的公路跑,悬挂系统的支撑性也没有好到哪去。欣慰的是,它比老款奇骏确实强了不少,在山路上跑要比老款快很多。只不过,对手在这方面也同时提升了,RAV4便是如此。
RAV4的改进比奇骏还要大,它的底盘一改丰田慢吞吞的特点。尤其和奇骏相比,你会觉得丰田在做了一个非常大的尝试,在弯道中底盘的敏捷度非常高,车身的动作比奇骏快得多。不过毕竟是台丰田,舒适性是一定要保留的。所以,敏捷的底盘配上了比较软的悬挂,再加上中规中矩的转向,这就意味着,它不可能追上CX-5,也不具备驾驶乐趣。唯一肯定的是,它比奇骏快。
● 奇骏:转向适合走烂路 离地间隙也有优势
终于到了奇骏发挥的环节,奇骏拥有最舒服的悬挂,且它的离地间隙最高,这让它在土路上的行驶速度要高于另外两位。悬挂对于坑洼的处理并非像RAV4一样尽量过滤掉,而是可以让你感觉到一些颠簸感,但这种颠簸感又不像老奇骏那种震动,也完全没有老奇骏的各种异响。这比较像途乐的悬挂特性,初段保留路感,遇到大的起伏路面,悬挂又可以提供足够的缓冲,不会让乘客晃来晃去。这点是比RAV4好的地方,RAV4已经缩短了悬挂行程,所以在起伏路面上的晃动要比奇骏大,CX-5也是如此。
奇骏的另一个优势在于它的转向系统,奇骏用牺牲转向精度的做法化解了颠簸路面上的震动。它的转向实在太适合这种土路了,双手握在上面感觉不到明显的震动,转向精度在此时已经不重要了,柔和的转向系统更利于保持方向的稳定。这一点,恰恰是RAV4的软肋。
● RAV4:滤震效果最好 但转向最不舒服
尽管RAV4的悬挂在公路上的路感很强,有时候甚至比CX-5还要颠一些。但在经过坑洼路面的时候,对于细微的处理和奇骏不相上下。不过,RAV4是用了一套柔软但行程短的悬挂,所以舒适性不差,但快速经过起伏路面时的晃动要比奇骏大。另外,它的离地间隙只有173mm,是三台车中最小的,这也让它的通过性处于劣势。
转向系统和奇骏刚好相反,当路况复杂,坑洼与碎石并存的时候,RAV4的方向盘会发生明显的弹跳感。这是RAV4较为明显的劣势,这种震动甚至超过了悬挂更硬的CX-5。
● CX-5:悬挂支撑最佳 意外的是一点都不颠
CX-5在这个环节反而让人意外,应该很颠的预测并没有发生。悬挂的行程和韧性结合的很好,不像RAV4那样柔软和震动并存。CX-5表现更均衡,虽然不及奇骏舒服,但出色的支撑会让你觉得信心很足。经过坑洼路面时悬挂一点不觉得松散,扎实度超过了RAV4。
CX-5完全是运动型SUV的特性,悬挂很硬朗,离地间隙也超过了200mm。所以快速驾驶时不用担心较大的坑洼会托底或者蹭到前杠,这方面相比奇骏来说更踏实一些。转向没有出现RAV4那样明显的震动,这让驾驶员的感受会更好一些。但站在乘客的角度来看,CX-5在舒适性上则体现不出明显的优势。
● 奇骏:0-100加速测试
而使用了CVT变速箱的奇骏,在起步时动力明显有所保留。起步时不会出现打滑的现象,而且起步也显得不像RAV4个CX-5那么急躁。
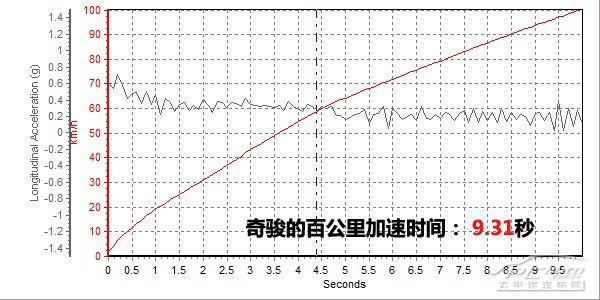
虽然起步比较温和,但是奇骏的百公里加速时间却是三款车型中最短的,CVT变速器保持了后程中动力线性的提升。
● RAV4:0-100加速测试
起步三款车型在起步时都出现了车头上扬的情况,不过相比RAV4,CX-5与奇骏的车身要更加平稳一些。在动力方面,使用了CVT变速器的奇骏要略显保守,初段动力偏弱一些。
RAV4的起步姿态是三车中抬头现象最明显的,在踩住刹车将转速轰至2500rpm之后,车身姿态已经有了明显的变化。
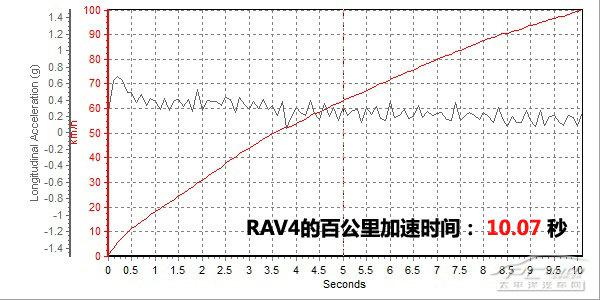
在0-100km/h测试中,RAV4的加速时间为10.07秒。相比奇骏和CX-5都要长,并且起步时G值有明显上浮。
● CX-5:0-100加速测试
而同样使用了6AT的CX-5在起步时要显得更加稳健一些,同样是2500rpm起步车身姿态的变化要比RAV4小很多。
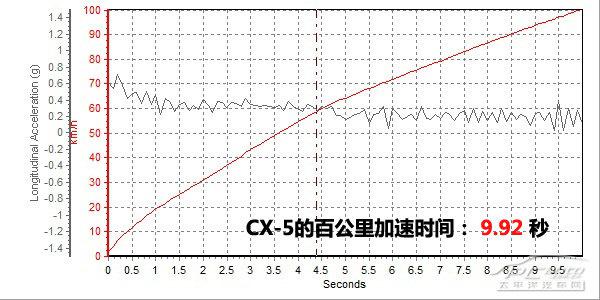
本次测试的CX-5为2.0L排量车型,但是在加速时间上并不逊色。在起步时动力要比使用CVT变速器的奇骏更加直接一些。而此前我们测试的2.5L车型的百公里加速时间为9.04秒。
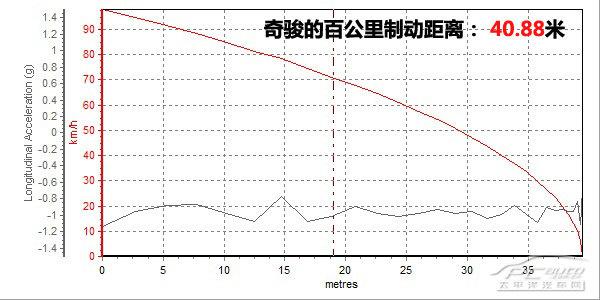
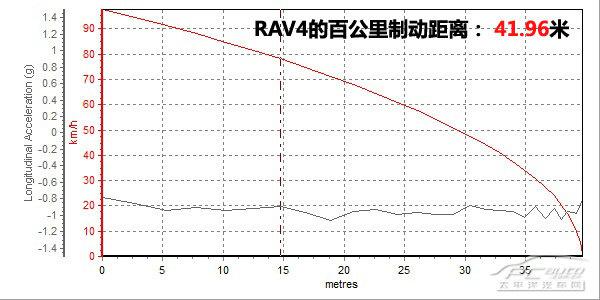
● 奇骏:100km/h-0制动测试
奇骏的车身尺寸是三款车型最大的,在紧急制动时并没有出现跑偏的现象,但车内可以感觉但明显的前倾。
● RAV4:100km/h-0制动测试
RAV4的制动力度并不线性,在初段的制动力要弱一些。因此在后程的大力制动下,车身并不平稳,前倾角度比较明显。
从距离来看,RAV4并没有我们预想的不行。虽然在前段制动力不足的情况下,需要更大力的踩刹车,但是成绩在可接受的范围之内。
● CX-5:100km/h-0制动测试
相比之下CX-5的制动力要好一些,前后段在制动的力度上并没有让人感觉到明显的区别,不过同样出现了前倾的“点头”现象。
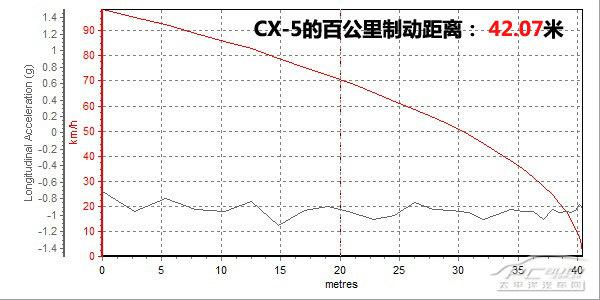
相比之下CX-5的制动成绩就不太令人满意了,虽然整个刹车的过程中,前后段的制动力度并没有明显的差别,但是制动的距离是三款车中最长的。而2.5L的测试距离为42.87米同样不如另外两款车型理解。
结语:
三款互为竞争对手的车型其实很容易区分哪款更适合自己,只要不追求操控性,那么奇骏无疑是最好的,日常代步和自驾游的最佳之选。但如果嫌奇骏的高速和弯道稳定性不够,对空间还有和奇骏同样需求的话,那么RAV4更好一些,它在操控稳定性和灵活性上比奇骏好了很多。假如有时候奇骏满足不了你的冲动,那么RAV4或许能弥补这一点。CX-5是最容易选择的,操控性甩掉对手几条街,即便RAV4与它相比也有较大的差距,在这方面CX-5更接近于途观和翼虎。但是,CX-5在实用性和豪华感上表现不够好,这更像是一款给年轻人设计的车,将重点放在了驾驶性能上。这三台车看似接近但差异明显,选择一款适合自己的车应该也很容易了。
-
SUV
+关注
关注
12文章
1368浏览量
30680 -
奇骏
+关注
关注
0文章
8浏览量
2799
发布评论请先 登录
相关推荐
海马汽车一季度产销量下滑,SUV与MPV车型市场承压
GGII:新上市快充车型超15款,中国快充版车型销量有望超5万辆

一汽丰田电动化车型销量占比46%,2024年第一季度销量同比增长1%
保时捷K1,首款三排座纯电SUV,预计2027年亮相,新平台加持
一款基于ESP32的情侣互动小电视,如何含蓄地告诉你对象你想她了?
蔚来智能硬件副总裁白剑:2024款新车搭载8295芯片,2023款车型暂无计划
海马汽车11月生产与销售状况揭晓:SUV累计销售下滑幅度有所减缓
8月比亚迪销量出炉!三款热销车型详解

5亿投入!25万起的AITO问界新M7正式发布 搅动SUV市场新战局

《2023中国卫星导航与位置服务产业发展白皮书》发布, 北斗芯片再受关注
巴西最畅销的车型之一:比亚迪元PLUS EV斩获桂冠
森海塞尔为 CUPRA 首款纯电轿跑 SUV – CUPRA Tavascan 注入音频魅力

小鹏 G6 超智驾轿跑 SUV 全新上市,面向主流市场






 工商网监
工商网监
评论