 “智造专家,埃夫特”正式发布新一代ER3B-C10机器人
“智造专家,埃夫特”正式发布新一代ER3B-C10机器人
2018年6月5日,“智造专家,埃夫特”在武汉工博会举行新品发布会,正式发布新一代ER3B-C10机器人。
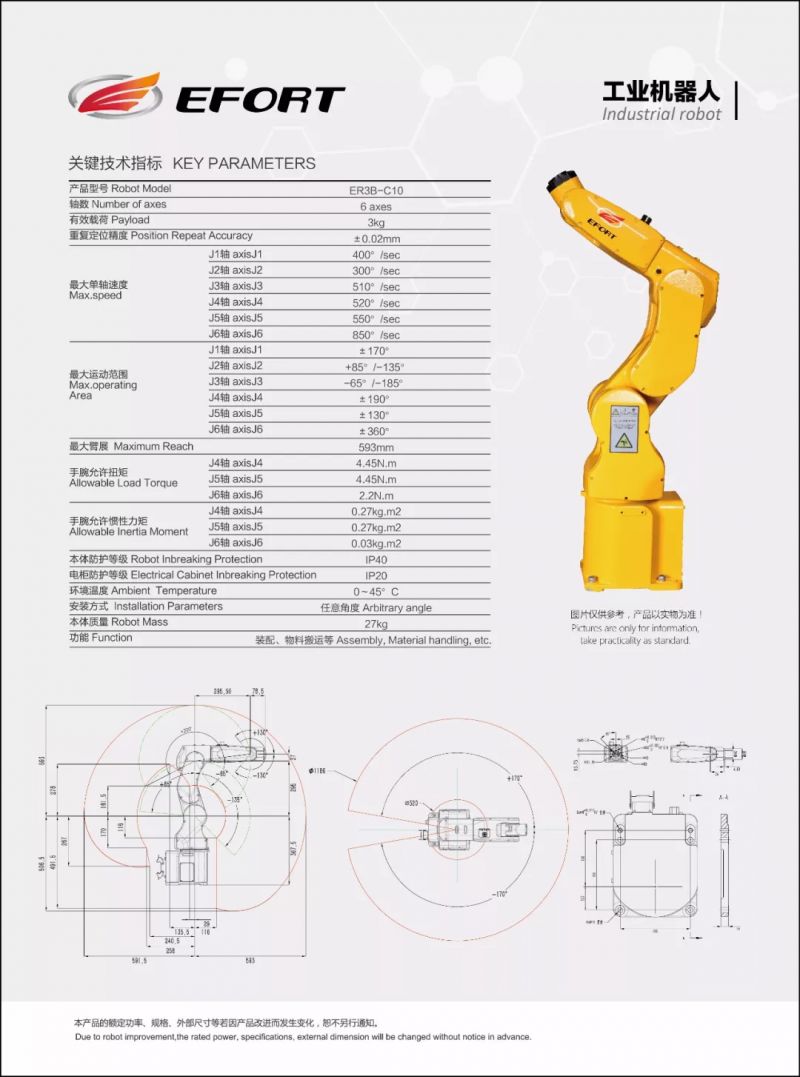
全面升级的ER3B-C10机器人负载3Kg,臂展593mm,重复定位精度±0.02mm,轨迹精度0.2mm,既能面向3C等工业领域胜任装配、涂胶和搬运等复杂应用,也能面向教育领域胜任教学方案、拆装实训等教学应用。
新品发布会现场,人气爆棚
在此之前的5月30日,埃夫特在3C行业的合作伙伴-佛山新鹏研发和交付的手机包装生产线登陆央视经济频道《交易时间》,这些手机包装生产线大批量应用埃夫特ER3机器人。
为了进一步满足3C行业等细分市场的迫切需求,ER3B-C10机器人做出了重大升级,速度更快、精度更高、功能更强和外观更美。
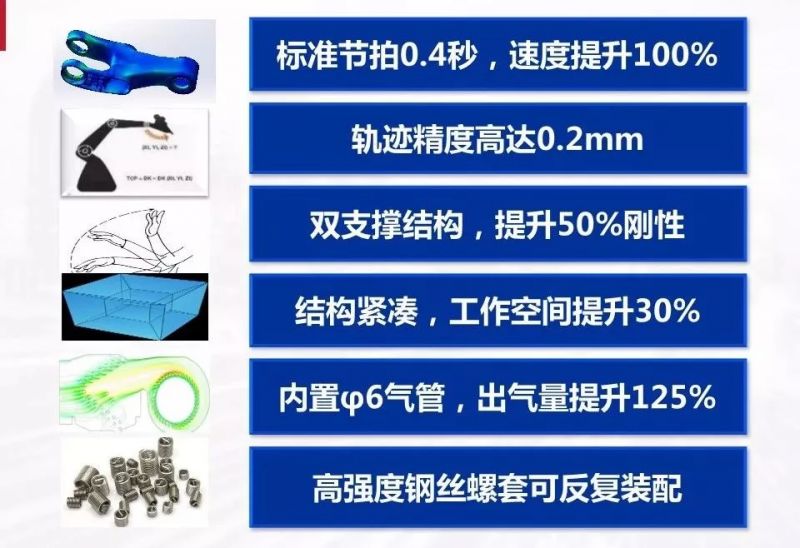
ER3B-C10机器人拥有极快的运动速度,速度提高约100%,标准门型动作节拍为0.4秒。
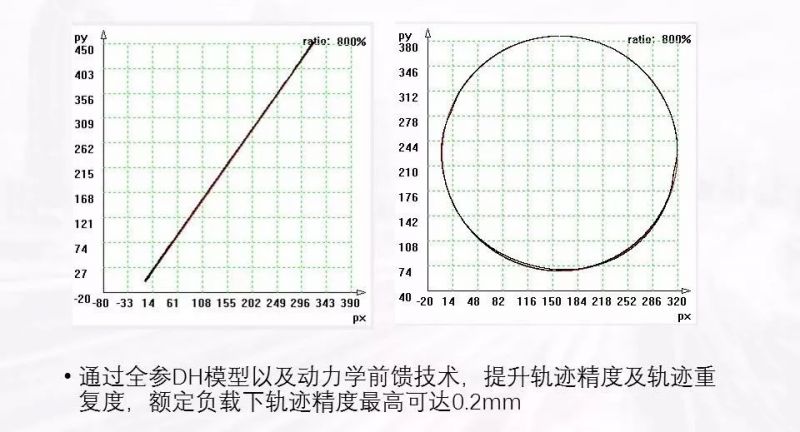
ER3B-C10机器人轨迹精度高达到0.2mm,可以用于装配、涂胶等对轨迹精度要求非常高的场景。
ER3B-C10机器人可以用于3C行业搬运、上下料等对速度要求很高的应用场景,以及用于装配、涂胶等对轨迹精度要求非常高的应用场景。
●涂胶:极高的轨迹精度,采用高精度动力学补偿算法,运动平稳,无抖动。
●搬运:合成加速度可达40m/s2,可以满足更高的节拍要求,真正做到秒取秒放。
ER3B-C10机器人为3C行业量身定制,采用特殊结构设计,整体结构更紧凑,空间覆盖更广,提升约30%工作空间。
ER3B-C10机器人采用双支撑结构,相对于悬臂支撑结构,刚性提高50%,无论是高速还是低速都能平稳运行。
ER3B-C10机器人内置2根φ6气管,相对于小负载机器人常用的φ4气管,出气量提高125%,用户无须从本体外面另外接入气管。
ER3B-C10机器人每个螺丝孔都镶有高强度钢丝螺套,反复拆卸不易滑丝,可用于教育行业反复拆装实训。
ER3B-C10机器人全新升级的工业设计,线条优美流畅,彰显气质和品牌范。
埃夫特在华中地区的合作伙伴和终端客户共同见证了ER3B上市这历史性的一刻。
市场部部长陈青主持新品发布会
西南大区和华中大区销售总监孙高致欢迎辞和阐述市场战略
埃夫特ER3B产品线经理阐述新产品开发策略
掀起你的红盖头,让我们看看你的脸
双机协作现场秀肌肉和线条
Duang~初次见面,请多指教
现场剪彩、合影留念,预祝ER3B新品大卖
“智造专家,埃夫特”新品发布会完美收官,武汉工博会还在火热进行中!据悉,本届武汉工博展邀请了大规模的专业观众,展会第一天便是人如潮涌。“智造专家,埃夫特”此次携全面升级的机器人产品和跨行业智能制造解决方案华丽亮相武汉工博会,就让小编带您一起领略武汉工博会第一天的现场盛况。
全面升级的新款ER3B-C10机器人爆款上市
双机协作、激光雕刻机器人解决方案
ER6B-C60焊接机器人解决方案
ER12-C604机器人冲床连线解决方案
-
传感器
+关注
关注
2525文章
48056浏览量
739951 -
机器人
+关注
关注
206文章
27015浏览量
201360
原文标题:燃爆了,全面升级的埃夫特机器人ER3B正式上市开售
文章出处:【微信号:im_robotic,微信公众号:机器人在线订阅号】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论