 2018IEEE IV会议投稿总数创历史新高
2018IEEE IV会议投稿总数创历史新高
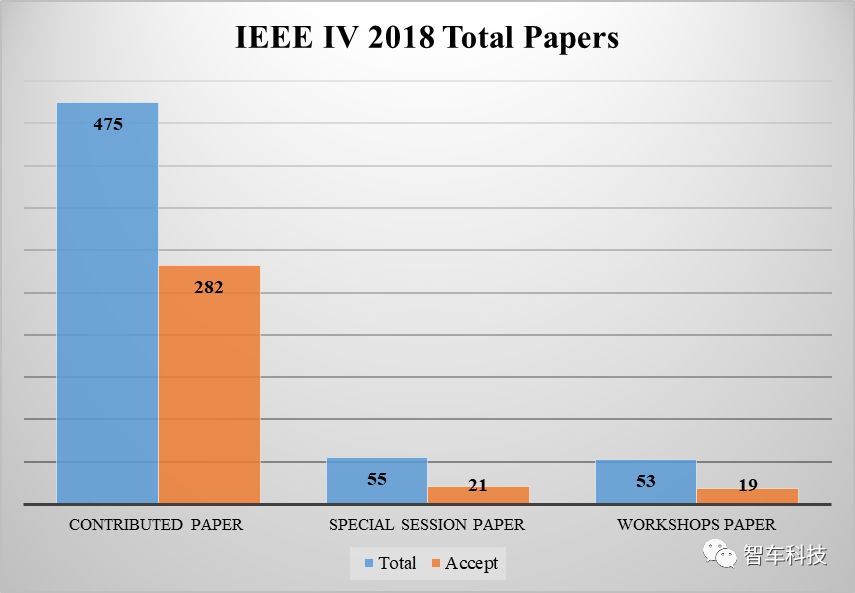
距离2018 IEEEIV国际智能车会议开幕还有一个月左右的时间,大会组委会近日公布了本届IV会议论文收录情况。本届IEEE IV大会共收到来自34个国家的603篇论文,接收论文356篇,录取率为59%,其中282篇Contributed paper,21篇SpecialSession Paper,53篇Workshops paper。
由IEEE智能交通系统协会(ITSS)主办的第29届国际智能车大会( IEEE IV 2018)将于2018年6月26日在中国常熟拉开序幕。IEEE Intelligent Vehicle Symposium(IEEE国际智能车大会)是IEEE智能交通协会举办的两大年度旗舰会议之一,旨在为全球该领域相关的研究人员、工程师、学者提供当今最先进技术的交流研讨机会。
2018 IEEE IV会议投稿总数创历史新高
IEEE IV会议自1989年至今已经举办了29届,目前是全球智能车科研学术领域水平最高、规模最大、历史最为悠久的顶级大会,堪比AI领域的NIPS大会。大会每年都会收到来自世界各地的专家学者的投稿,本届IEEE IV大会共收到来自34个国家的603篇论文,有356篇论文被接收,其中282篇Contributed paper,21篇SpecialSession Paper,53篇Workshops paper,录取率为59%。
第29届IEEE IV的所有论文都将被EI收录,优秀论文将被推荐到IEEE智能车汇刊(IEEE Transactions on Intelligent Vehicles),IEEE智能交通系统汇刊(IEEE Transactions on Intelligent Transportation Systems,SCI检索,影响因子3.724),IEEE/ CAA自动化学报(IEEE/CAA Journal of Automatica Sinica)和IEEE智能交通系统杂志(IEEE Intelligent Transportation Systems Magazine,SCI检索,影响因子3.654)上发表。
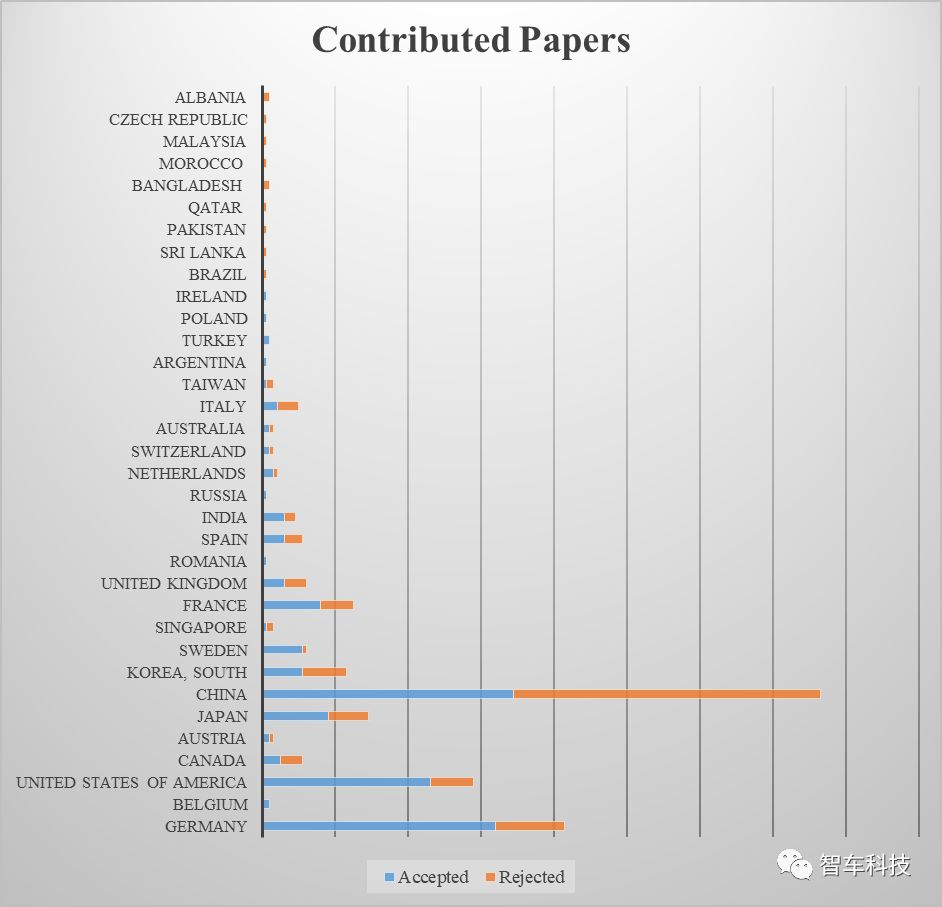
2018 IEEE IV会议是继2009年登陆中国(西安)之后,第二次来到中国(常熟),吸引了一大批国内智能车领域研究学者的投稿。主会议论文投稿中有153篇(录用69篇)来自中国,83篇(录用64篇)来自德国,58篇(录用46篇)来自美国,这三个国家的投稿占据了所有论文投稿的近三分之一。美国是自动驾驶技术的发源地,对此技术的探索一直处于世界领先水平,收到的论文质量也很高,录取比例高达79%;德国一直是汽车技术强国,奔驰、宝马、大众等汽车知名品牌都来源于德国,尽管相比论文他们更看重专利,但是本届大会上他们也投了很多高质量的文章;近几年,随着国家对智能汽车技术的关注,国内迎来了汽车智能化的研究热潮,共收到来自国内各高校、研发单位等机构的153篇稿件,录用论文总数达到了69篇,其中不乏一些国际领先的技术研究。
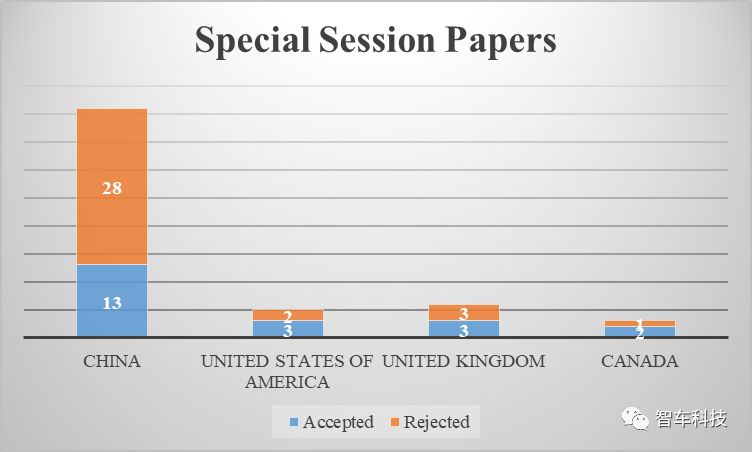
Special Session Papers 主要来自中国、美国、英国、加拿大四个国家的高校和机构的投稿,共收到55篇论文,其中 41篇来自国内机构投稿,包括:清华大学、中科院自动化研究所、西安交通大学、同济大学、武汉理工大学、上海交通大学、昆明理工大学等。从这些数据中,可以看出国内高校对这次大会关注和重视,也暗示出我国在智能驾驶学术研究上的投入。国内稿件虽多,但最终只有12篇论文被录用。同时,大会也收到了美国联邦公路管理局、福特汽车公司、加拿大滑铁卢大学等国外机构的高质量论文。
本届大会涵盖新能源汽车、特种地面车辆、智能车辆控制与安全、CAV测试与评估、智能车辆仿真与导航等9大主题会议,将由国内外顶级专家学者以主旨报告、现场讨论等多种形式分享当前智能车领域的最新技术动态以及未来发展前景。同时,由来自世界各地的数千名学者组织的20多个专业研讨会,将围绕智能汽车的感知、识别、辅助系统、虚拟测试、智能交通系统、人机交互等多个相关主题展开为期三天的学术探讨,优秀论文的作者也将分享他们的论文核心内容,让广大业内外人士更清晰地了解智能汽车领域未来发展趋势,知悉行业最新动态,把握市场发展脉络,促进产业快速发展。同期举办的智能汽车产业展汇集了英特尔、伟世通、慧拓智能、车和家、美团等数百家智能汽车及零部件企业,分享最新产业成果、展望未来产业动向。将智能车领域最尖端技术研究与科研成果转化有机结合,为技术理论研究方向提供产业化引导与启发。
IV 2018推荐论文
IEEE IV大会有严格的论文评价机制,资历深厚的组委会阵容和在智能车相关领域深耕多年的审稿专家保证了论文审核工作的公平、公正、有序进行。智车科技作为本次大会的战略合作伙伴,得到了本次论文的整体评分情况,并选择了其中评分较高的一些论文进行重点梳理与推荐。(排名不分先后)
CONTRIBUTED PAPERS
Paper
1
Rendering Physically Correct Raindrops on Wind shields for Robustness Verification of Camera-based Object Recognition
这篇论文的作者是 Alexandervon Bernuth, 来自德国图宾根大学Wilhelm Schickard计算机科学研究所计算机工程系主任。单看论文标题就让人兴致盎然,通过在挡风玻璃上撒上水滴来模拟下雨场景,进行摄像头目标识别的鲁棒性验证。对于无人驾驶汽车来讲,下雨天确实给视觉识别带来很大的麻烦,雨水附着会使镜头变得模糊不清。目前,有一部分公司推出专门的微型雨刷器或者加热技术来去除水滴,硬件上的改变并不能彻底解决相机对下雨场景的鲁棒性,人工智能可能要学习适应在雨中处理图像。Alexander von Bernuth团队提出了一种新的方法来渲染这些雨滴,使用连续最近邻R*树搜索算法。3D场景是由摄像头生成的立体图像,雨滴下落过程遵循物理定律,所得到的图像可用于扩展机器学习的训练数据集,而不必强制获得新的真实图像。
左图为原始采集图像和使用3D光线跟踪算法重建场景的完整渲染图之间的差异。右图为城市景观数据集与渲染雨滴。挡风玻璃放置在相机前30cm处,水平方向倾斜27°。雨滴下落半径在r=1.5mm,标准偏差为0.4mm。
Paper
2
Towards End-to-End Lane Detection: an Instance Segmentation Approach
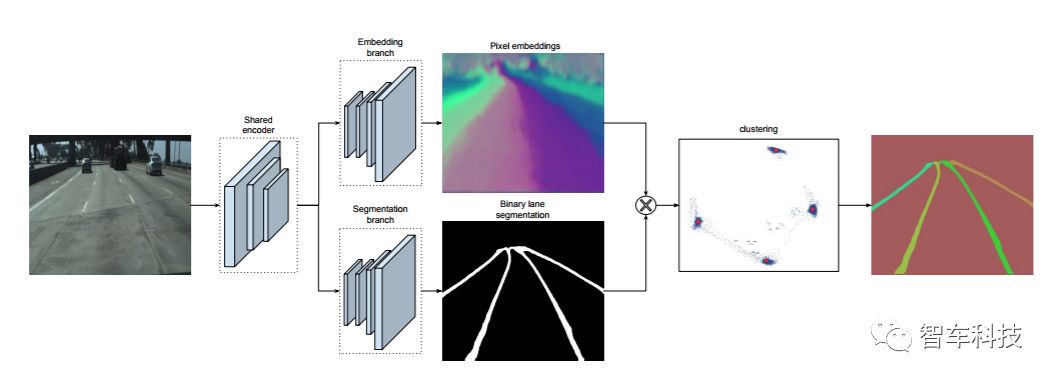
系统总览图:给定一个输入图像,LaneNet输出一个车道实例地图,为车道ID标记每个车道像素。接下来,使用H-Net输出的变换矩阵来变换车道像素,该变换矩阵学习了以输入图像为条件的透视变换。对于每一条车道,都用三阶多项式进行拟合,并且车道被重新投影到图像上。
第二篇论文作者为来自比利时鲁汶大学的Davy Neven,鲁汶大学是比利时久负盛名的最高学府,世界50强高校,欧洲历史最悠久且最受人尊敬的大学之一,也是享誉全球的世界级顶尖研究型大学。Davy Neven近几年来,一直在围绕语义分割、场景理解、动态图像增强等技术进行研究。该论文,他们介绍了一种以50帧/秒进行端到端车道检测的方法,这是一种快速车道检测算法,可以处理不同数量的车道并应对车道变化。应用一个以图像为条件的学习透视变换,对分段的实例车道进行参数化,确保了一种对道路平面变化具有鲁棒性的车道匹配,可以有效抵抗地平面的坡度变化。这种方法摆脱了传统车道检测方法对高度专业化手工标注的依赖,同时也解决了近期提出的利用深度学习模型进行像素级车道分割训练需要预定义固定数量的车道的缺陷。
Paper
3
Probabilistic Prediction of Vehicle Semantic Intention and Motion
预测车辆在不同驾驶场景下的插入区域(彩色区域)
来自美国加州大学伯克利分校机械工程系的Yeping Hu博士分享了他们在车辆语义意图和运动的概率预测方面的研究论文。她的研究涵盖城市自动驾驶的决策,运动规划和运动预测。目前正在开展一项BDD项目:“基于深度神经网络学习的随机政策的城市自主驾驶运动预测”。目前大多数研究仅通过考虑特定场景来确定驾驶意图的数量。然而,不同的驾驶环境通常包含各种可能的驾驶操纵。因此,需要一种能够适应不同流量场景的意图预测方法。在Yeping Hu博士的论文中提出了一种基于语义的意图和运动预测(SIMP)方法,可以通过使用语义定义的车辆行为来适应任何驾驶场景。它利用基于深度神经网络的概率框架来估计周围车辆的意图,最终位置和相应的时间信息。
Paper
4
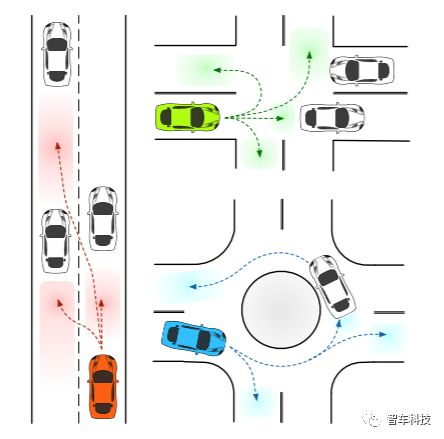
Modeling and Predicting Vehicle MotionActivities by Using And-Or Graph
车道变换场景中的与或图
通过建模来预测车辆运动能力对于自动驾驶汽车来说非常重要。清华大学的汪烁枫、李力等人提出了一个基于与或图的模型,该模型可以给出一个简单明了的车辆运动描述。与其他模型相比,这个新模型放宽了马尔可夫性质在两个活动之间转换的要求,因此更加灵活。这个模型的参数可以很容易地从数据中学习。使用训练好的新模型,可以预测正在进行的运动活动标签及其相应的概率。他们通过实验表明,这种新模型可以实现很高标准的预测精度(97%)。
Paper
5
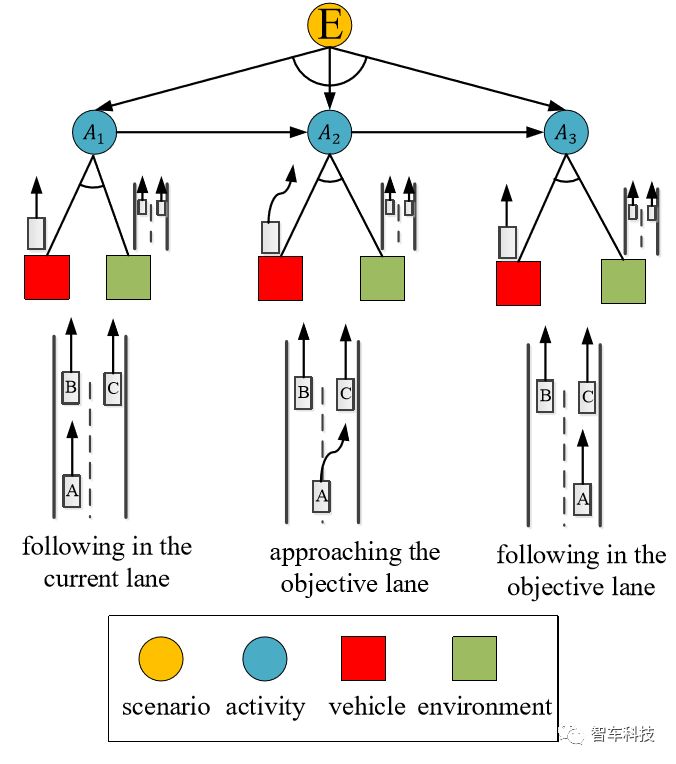
CNN-based multi-frame IMO detection from a monocular camera
上图为KITTI数据集里序列拍摄的场景:IMO在顶部图像中被正确识别。
德国的NolangFanani博士是IEEE IV会议的常客,他曾在2016年的IEEE IV会议上发表过一篇《使用基于传播的跟踪关键点轨迹估计》(Keypoint trajectory estimation using propagationbased tracking),2017年发表过一篇《单眼视觉测距的多模态尺度估计》(Multimodal scale estimation for monocular visual odometry),而今年的大会他带来的论文题目为CNN-based multi-frame IMO detection from amonocular camera。这篇文章介绍了一种用于从安装在车辆上的单目摄像头中检测独立移动物体(IMO)的方法。这种方法采用一个基于CNN的分类器,来生成IMO备选补丁,通过这些补丁中轨迹上的关键点来检测几何标准。通过多帧核线一致性检查,分析IMO备选补丁内的关键点。然后使用IMO备选补丁的运动信息和基于外观的信息获得运动标签(IMO /静态),他们在KITTI 数据集里评估了这一方法。
Paper
6
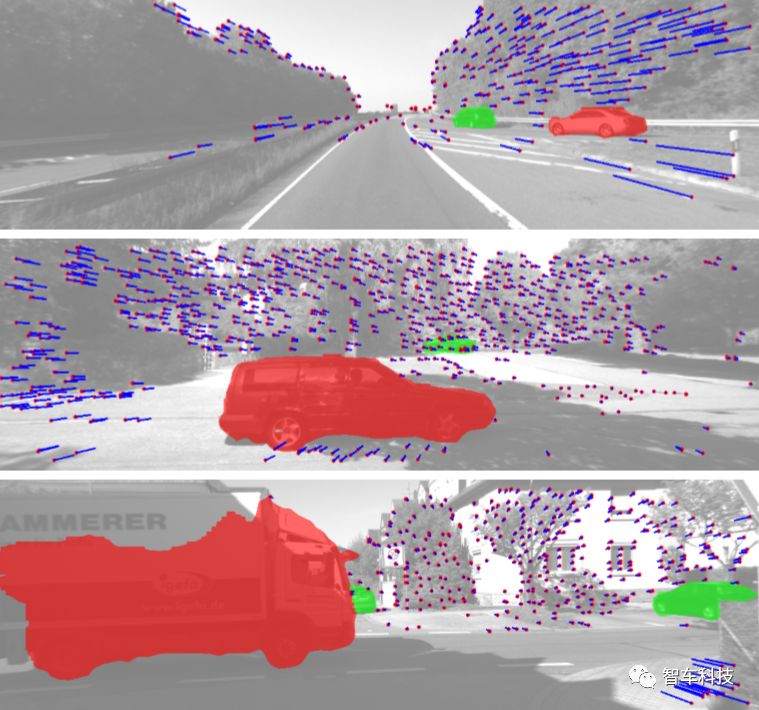
Accurate Localization in Underground Garages Via Cylinder Feature BasedMap Matching
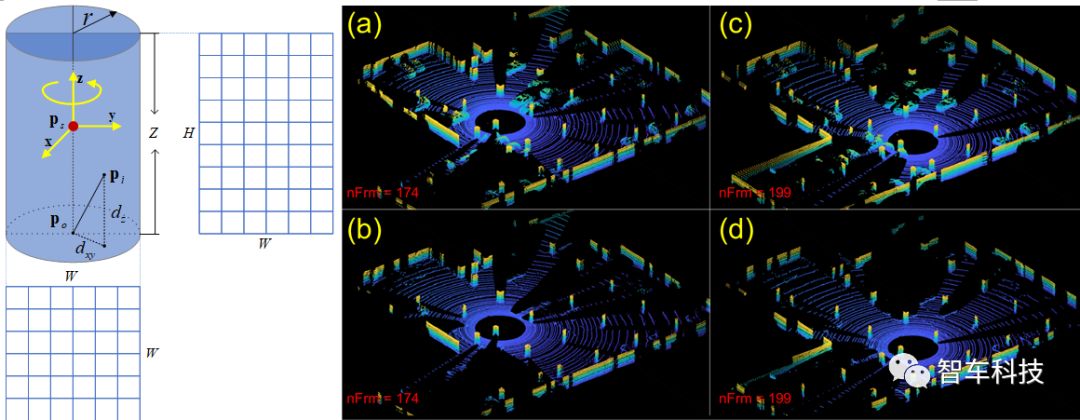
左图为提出的CyRoPS特征,该特征基于多种统计量,具有较好的物体识别性能。右图(a)(c)是原始3D点云,(b)(d)展示了基于Cy-RoPS特征剔除动态障碍物后的效果,剔除后可提高无人车的定位精度。
地下车库是典型的无GPS信号场景,随着技术的发展,无人车在地下车库中的自主定位变的尤为重要。西安交通大学薛建儒老师团队提出了一种在无GPS信号的环境中提高车辆定位精度的方法。针对地下车库/校园内部结构特征,提出一种基于局部表面的描述子CyRoPS,该描述子具有旋转不变/计算快速/对噪声鲁棒等多种优点,可以准确选出车库/校园中的常见静态物体,如墙面/树木/柱子等。同时,我们提出一种基于点云匹配的定位框架,由于场景中的动态障碍物被有效剔除,定位过程稳定/结果准确,满足无人驾驶导航要求。实验表明,这一方法可以极大的提升定位精度,增加系统的鲁棒性。
Paper
7
Cooperative Lane Change Motion Planning of Connected and AutomatedVehicles: A Stepwise Computational Framework
加拿大Zhang Youmin 博士带来了他们在多车协同车道变换运动规划的研究,他们提出了一种逐步计算框架,通过连接的自动控制系统,协调车辆通信和自动车辆的控制,以改善交通系统的移动性、安全性和可持续性,虽然他们迄今为止大多数现场实验的研究都集中在简单的高速公路驾驶场景(如合作自适应巡航控制(CACC))的自动车辆控制,但CACC和相关交通管理技术的实际部署需要所有交通流动的自动化,包括车道变换和合并演习,充分实现潜在的系统效益。本文描述了Zhang, Youmin团队在开发创新型车辆控制平台和算法上的努力,成功地进行车道变换操作的现场实验,其使用了自动速度控制,车辆到车辆(V2V)通信和基于车辆的雷达系统执行。
SPECIAL SESSION PAPERS
Paper
8
State of Charge Estimation Based on State of Health Correction forLithium-ion Batteries
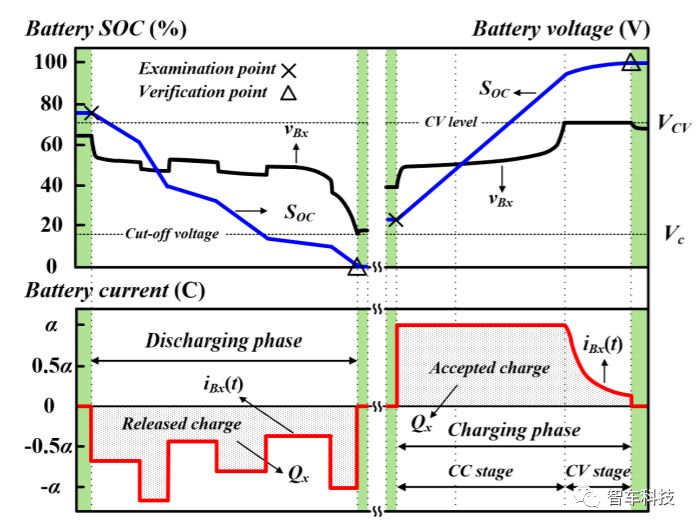
Special Session Paper中,来自国内武汉理工大学的State of Charge Estimation Based on State of Health Correction forLithium-ion Batteries论文受到了专家的一致好评,作者是武汉理工大学汽车工程学院杜常青,他长期致力于锂离子电池的研究。本文他研究了基于库仑计数法的锂离子电池健康状态(SOH)校准的荷电状态(SOC)估计方法。该方法旨在提出一种易于使用的解决方案,用于估计电池状态,而不需要苛刻的计算或复杂的数据库。为了更准确地估计老化电池的SOC,必须考虑其满容量的退化。借助一种基于库仑计数的锂离子电池SOC估计方法,通过考虑容量衰减和电流测量误差,可以更准确估计SOC。
WORKSHOP PAPERS
Paper
9
Decision-Theoretic Cooperative Parking forConnected Vehicles: an Investigation
图片来源网络
Workshops Paper 中,Aliedani, ALI和 Loke, Seng的Decision-Theoretic Cooperative Parking for Connected Vehicles: an Investigation论文受到审稿嘉宾的一致好评。这篇论文总结出了一种协同停车算法(COPARKS WS)。其主要思想是在停车场之间引入车辆之间的通信,以便每辆车可以互相通信其目的地。而且引入了一种选择,如果该地区有很高的机会被占据,其他汽车将改变自己的目的地。最后,汽车可以通过衡量到达目的地的步行距离和空闲停车位,来改变其目的区域。
Paper
10
The ParallelEye-CS Dataset: Constructing Artificial Scenes for Evaluating the Visual Intelligence of Intelligent Vehicles
ParallelEye虚拟图像集的标注信息示例。第一行左:深度标注;第一行右:光流标注;第二行左:目标跟踪标注;第二行右:目标检测标注;第三行左:实例分割标注;第三行右:语义分割标注。
来自中国科学院自动化研究所复杂系统管理与控制国家重点实验室、青岛智能产业技术研究院平行视觉技术创新中心的Xuan Li等分享了他们构建的平行眼(Parallel Eye)数据集。该团队建立了开源的平行视觉研究平台OpenPV (Open Source Parallel Vision Platform),用于推动平行视觉研究,构建更健壮的智能视觉系统。在OpenPV平台上,发布了一批 ParallelEye 虚拟图像集,包括原始图像及标注信息,可以供平行视觉和计算机视觉研究者免费使用。在此之前,基于平行视觉理论,田永林等利用ParallelEye数据集进行了目标检测器的训练和测试研究,通过虚实结合的方式提高了Faster R-CNN和DPM目标检测器的性能,并且通过定制虚拟图像中的目标尺寸、遮挡程度等属性,测试其对目标检测器的影响,取得了优异的效果。
-
新能源汽车
+关注
关注
139文章
9679浏览量
97765 -
自动驾驶
+关注
关注
773文章
13027浏览量
163200
原文标题:2018 IEEE IV国际智能车会议论文接收量创历史新高!
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
SK海力士发布2024财年第1季度财报,创历史同期新高
中国交付民用无人机超317万 创下历史新高
智芯公司参加IEEE 1901.3国际标准工作组第3次会议

IEEE1901.3标准工作组第三次会议在长沙召开,加速推进PLC双模通信国际标准的制定

分红超90亿!比亚迪2023年净利润超300亿,创历史新高

中国移动营运收入10093亿 利润1318亿创历史新高
IV功率检测仪是什么
工业富联股价创历史新高!市值超5100亿元
台积电股价刷新历史新高,台积电上涨2.19%
现代汽车集团发布2023年全年业绩 营业利润创历史新高
光伏IV曲线测试的原理及意义
光伏IV测试仪有哪些?






 工商网监
工商网监
评论