 工业机器人的运动指令知识学习
工业机器人的运动指令知识学习
工业机器人的运动指令
通常工业机器人商务运动指令记录了位置数据、运动类型和运动速度。如果在工业机器人示教期间,不设定运动类型和运动速度,则自动使用上一次的设定值。位置数据记录的是工业机器人当前的位置信息,记录运动指令的同时,记录位置信息。运动类型指定了在执行时示教点之间的运动轨迹。工业机器人一般支持3种运动类型:关节运动(MOVJ)、直线运动(MOVL)、圆弧运动(MOVC)。运动速度指机器人以何种速度执行在示教点之间的运动。
一、工业机器人关节运动类型:
当机工业器人不需要以指定路径运动到当前示教点时,采用关节运动类型。关节运动类型对应的运动指令为MOVJ。一般说来,为安全起见,程序起始点使用关节运动类型。关节运动类型的特点是速度最快、路径不可知,因此,一般此运动类型运用在空间点上,并且在自动运行程序之前,必须低速检查一遍,观察工业机器人实际运动轨迹是否与周围设备有干涉。
二、工业机器人直线运动类型:
当工业机器人需要通过直线路径运动到当前示教点时,采用直线运动类型。直线运动类型对应的运动指令为MOVL。直线运动的起始点是前一运动指令的示教点,结束点是当前指令的示教点。对于直线运动,在运动过程中,工业机器人运动控制点走直线,夹具姿态自动改变如下图:
三、工业机器人圆弧运动类型:
当工业机器人需要以圆弧路径运动到当前示教点时,采用圆弧运动类型。圆弧运动类型对应的运动指令为MOVC。
1、单个圆弧
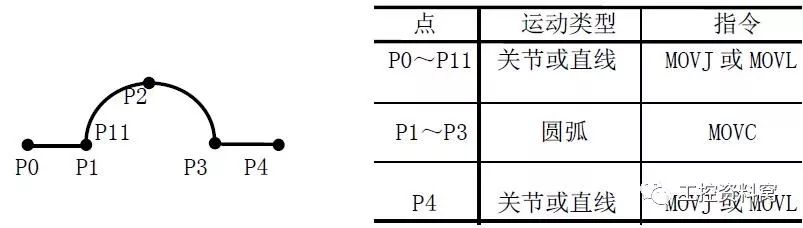
三点确定唯一圆弧,因此,圆弧运动时,需要示教三个圆弧运动点,即P1~P3,如下图所示。如果示教点P0为关节或直线运动,在开始圆弧运动前,机器人以直线从P0点运动到P11点,P11点与起弧点P1是同一点。
2、连续多个圆弧
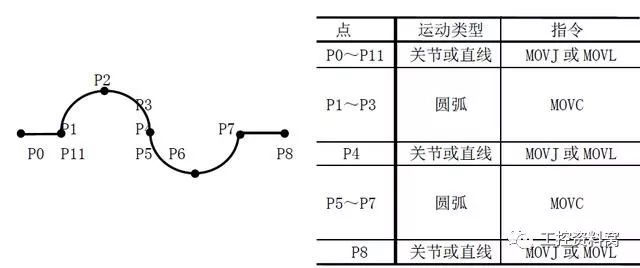
当需要连续多个圆弧运动时,两段圆弧运动必须由一个关节或直线运动点隔开,且第一段圆弧的终点和第二段圆弧的起点重合。
程序指令编写如下:
NOP
MOVJVJ=10------P0
MOVLVL=100-----P11
MOVCVC=100---P1与P11为同一点
MOVCVC=100---P2
MOVCVC=100---P3
MOVJVJ=10------P4
MOVCVC=100----P5与P3和P4为同一点
MOVCVC=100----P6
MOVCVC=100----P7
MOVLVL=100-----P8
END
3、圆弧运动速度
(1)P2点运行速度用于P1到P2的弧。
(2)P3点运行速度用于P2到P3的弧。
四、工业机器人运动参考示意图:
-
指令
+关注
关注
1文章
577浏览量
35372 -
工业机器人
+关注
关注
90文章
3260浏览量
91887
原文标题:工业机器人操作基础-工业机器人运动指令
文章出处:【微信号:gongkongworld,微信公众号:工控资料窝】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论