 迁移学习的原理,基于Keras实现迁移学习
迁移学习的原理,基于Keras实现迁移学习
数据科学家Prakash Jay介绍了迁移学习的原理,基于Keras实现迁移学习,以及迁移学习的常见情形。
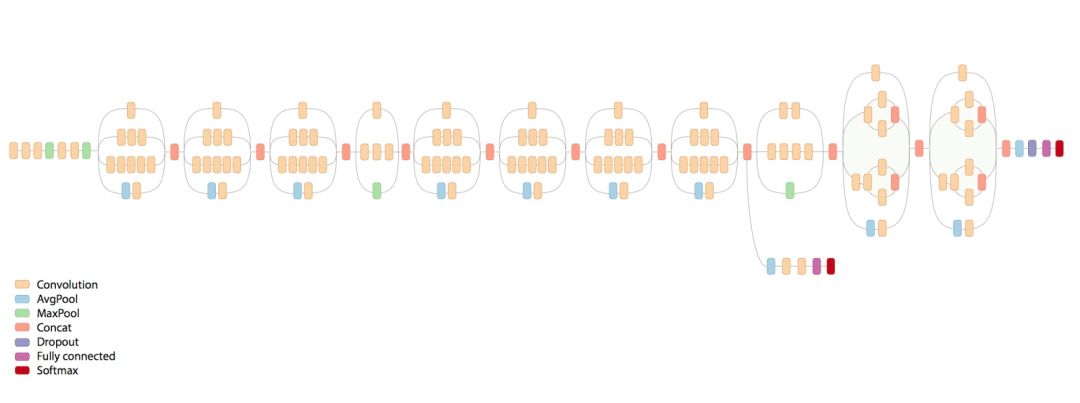
Inception-V3
什么是迁移学习?
机器学习中的迁移学习问题,关注如何保存解决一个问题时获得的知识,并将其应用于另一个相关的不同问题。
为什么迁移学习?
在实践中,很少有人从头训练一个卷积网络,因为很难获取足够的数据集。使用预训练的网络有助于解决大多数手头的问题。
训练深度网络代价高昂。即使使用数百台配备了昂贵的GPU的机器,训练最复杂的模型也需要好多周。
决定深度学习的拓扑/特色/训练方法/超参数是没有多少理论指导的黑魔法。
我的经验
不要试图成为英雄。
—— Andrej Karapathy
我面对的大多数计算机视觉问题没有非常大的数据集(5000-40000图像)。即使使用极端的数据增强策略,也很难达到像样的精确度。而在少量数据集上训练数百万参数的网络通常会导致过拟合。所以迁移学习是我的救星。
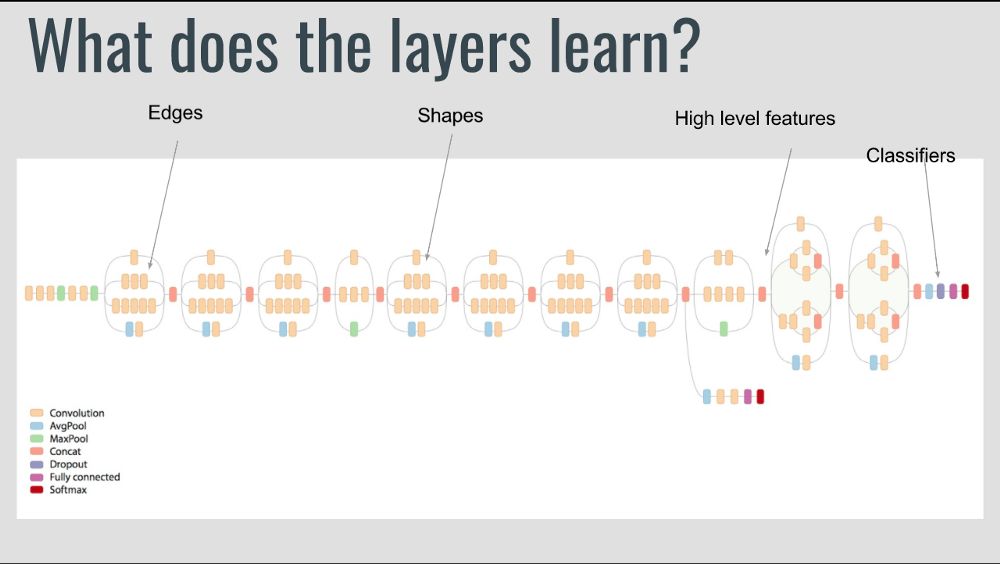
迁移学习为何有效?
让我们看下深度学习网络学习了什么,靠前的层尝试检测边缘,中间层尝试检测形状,而靠后的层尝试检测高层数据特征。这些训练好的网络通常有助于解决其他计算机视觉问题。
下面,让我们看下如何使用Keras实现迁移学习,以及迁移学习的常见情形。
基于Keras的简单实现
from keras import applications
from keras.preprocessing.image importImageDataGenerator
from keras import optimizers
from keras.models importSequential, Model
from keras.layers importDropout, Flatten, Dense, GlobalAveragePooling2D
from keras import backend as k
from keras.callbacks importModelCheckpoint, LearningRateScheduler, TensorBoard, EarlyStopping
img_width, img_height = 256, 256
train_data_dir = "data/train"
validation_data_dir = "data/val"
nb_train_samples = 4125
nb_validation_samples = 466
batch_size = 16
epochs = 50
model = applications.VGG19(weights = "imagenet", include_top=False, input_shape = (img_width, img_height, 3))
"""
层 (类型) 输出形状 参数数量
=================================================================
input_1 (InputLayer) (None, 256, 256, 3) 0
_________________________________________________________________
block1_conv1 (Conv2D) (None, 256, 256, 64) 1792
_________________________________________________________________
block1_conv2 (Conv2D) (None, 256, 256, 64) 36928
_________________________________________________________________
block1_pool (MaxPooling2D) (None, 128, 128, 64) 0
_________________________________________________________________
block2_conv1 (Conv2D) (None, 128, 128, 128) 73856
_________________________________________________________________
block2_conv2 (Conv2D) (None, 128, 128, 128) 147584
_________________________________________________________________
block2_pool (MaxPooling2D) (None, 64, 64, 128) 0
_________________________________________________________________
block3_conv1 (Conv2D) (None, 64, 64, 256) 295168
_________________________________________________________________
block3_conv2 (Conv2D) (None, 64, 64, 256) 590080
_________________________________________________________________
block3_conv3 (Conv2D) (None, 64, 64, 256) 590080
_________________________________________________________________
block3_conv4 (Conv2D) (None, 64, 64, 256) 590080
_________________________________________________________________
block3_pool (MaxPooling2D) (None, 32, 32, 256) 0
_________________________________________________________________
block4_conv1 (Conv2D) (None, 32, 32, 512) 1180160
_________________________________________________________________
block4_conv2 (Conv2D) (None, 32, 32, 512) 2359808
_________________________________________________________________
block4_conv3 (Conv2D) (None, 32, 32, 512) 2359808
_________________________________________________________________
block4_conv4 (Conv2D) (None, 32, 32, 512) 2359808
_________________________________________________________________
block4_pool (MaxPooling2D) (None, 16, 16, 512) 0
_________________________________________________________________
block5_conv1 (Conv2D) (None, 16, 16, 512) 2359808
_________________________________________________________________
block5_conv2 (Conv2D) (None, 16, 16, 512) 2359808
_________________________________________________________________
block5_conv3 (Conv2D) (None, 16, 16, 512) 2359808
_________________________________________________________________
block5_conv4 (Conv2D) (None, 16, 16, 512) 2359808
_________________________________________________________________
block5_pool (MaxPooling2D) (None, 8, 8, 512) 0
=================================================================
总参数: 20,024,384.0
可训练参数: 20,024,384.0
不可训练参数: 0.0
"""
# 冻结不打算训练的层。这里我冻结了前5层。
for layer in model.layers[:5]:
layer.trainable = False
# 增加定制层
x = model.output
x = Flatten()(x)
x = Dense(1024, activation="relu")(x)
x = Dropout(0.5)(x)
x = Dense(1024, activation="relu")(x)
predictions = Dense(16, activation="softmax")(x)
# 创建最终模型
model_final = Model(input = model.input, output = predictions)
# 编译最终模型
model_final.compile(loss = "categorical_crossentropy", optimizer = optimizers.SGD(lr=0.0001, momentum=0.9), metrics=["accuracy"])
# 数据增强
train_datagen = ImageDataGenerator(
rescale = 1./255,
horizontal_flip = True,
fill_mode = "nearest",
zoom_range = 0.3,
width_shift_range = 0.3,
height_shift_range=0.3,
rotation_range=30)
test_datagen = ImageDataGenerator(
rescale = 1./255,
horizontal_flip = True,
fill_mode = "nearest",
zoom_range = 0.3,
width_shift_range = 0.3,
height_shift_range=0.3,
rotation_range=30)
train_generator = train_datagen.flow_from_directory(
train_data_dir,
target_size = (img_height, img_width),
batch_size = batch_size,
class_mode = "categorical")
validation_generator = test_datagen.flow_from_directory(
validation_data_dir,
target_size = (img_height, img_width),
class_mode = "categorical")
# 保存模型
checkpoint = ModelCheckpoint("vgg16_1.h5", monitor='val_acc', verbose=1, save_best_only=True, save_weights_only=False, mode='auto', period=1)
early = EarlyStopping(monitor='val_acc', min_delta=0, patience=10, verbose=1, mode='auto')
# 训练模型
model_final.fit_generator(
train_generator,
samples_per_epoch = nb_train_samples,
epochs = epochs,
validation_data = validation_generator,
nb_val_samples = nb_validation_samples,
callbacks = [checkpoint, early])
迁移学习的常见情形
别忘了,靠前的层中的卷积特征更通用,靠后的层中的卷积特征更针对原本的数据集。迁移学习有4种主要场景:
1. 新数据集较小,和原数据集相似
如果我们尝试训练整个网络,容易导致过拟合。由于新数据和原数据相似,因此我们期望卷积网络中的高层特征和新数据集相关。因此,建议冻结所有卷积层,只训练分类器(比如,线性分类器):
for layer in model.layers:
layer.trainable = False
2. 新数据集较大,和原数据集相似
由于我们有更多数据,我们更有自信,如果尝试对整个网络进行精细调整,不会导致过拟合。
for layer in model.layers:
layer.trainable = True
其实默认值就是True,上面的代码明确指定所有层可训练,是为了更清楚地强调这一点。
由于开始的几层检测边缘,你也可以选择冻结这些层。比如,以下代码冻结VGG19的前5层:
for layer in model.layers[:5]:
layer.trainable = False
3. 新数据集很小,但和原数据很不一样
由于数据集很小,我们大概想要从靠前的层提取特征,然后在此之上训练一个分类器:(假定你对h5py有所了解)
from keras import applications
from keras.preprocessing.image importImageDataGenerator
from keras import optimizers
from keras.models importSequential, Model
from keras.layers importDropout, Flatten, Dense, GlobalAveragePooling2D
from keras import backend as k
from keras.callbacks importModelCheckpoint, LearningRateScheduler, TensorBoard, EarlyStopping
img_width, img_height = 256, 256
### 创建网络
img_input = Input(shape=(256, 256, 3))
x = Conv2D(64, (3, 3), activation='relu', padding='same', name='block1_conv1')(img_input)
x = Conv2D(64, (3, 3), activation='relu', padding='same', name='block1_conv2')(x)
x = MaxPooling2D((2, 2), strides=(2, 2), name='block1_pool')(x)
# 块2
x = Conv2D(128, (3, 3), activation='relu', padding='same', name='block2_conv1')(x)
x = Conv2D(128, (3, 3), activation='relu', padding='same', name='block2_conv2')(x)
x = MaxPooling2D((2, 2), strides=(2, 2), name='block2_pool')(x)
model = Model(input = img_input, output = x)
model.summary()
"""
_________________________________________________________________
层 (类型) 输出形状 参数数量
=================================================================
input_1 (InputLayer) (None, 256, 256, 3) 0
_________________________________________________________________
block1_conv1 (Conv2D) (None, 256, 256, 64) 1792
_________________________________________________________________
block1_conv2 (Conv2D) (None, 256, 256, 64) 36928
_________________________________________________________________
block1_pool (MaxPooling2D) (None, 128, 128, 64) 0
_________________________________________________________________
block2_conv1 (Conv2D) (None, 128, 128, 128) 73856
_________________________________________________________________
block2_conv2 (Conv2D) (None, 128, 128, 128) 147584
_________________________________________________________________
block2_pool (MaxPooling2D) (None, 64, 64, 128) 0
=================================================================
总参数:260,160.0
可训练参数:260,160.0
不可训练参数:0.0
"""
layer_dict = dict([(layer.name, layer) for layer in model.layers])
[layer.name for layer in model.layers]
"""
['input_1',
'block1_conv1',
'block1_conv2',
'block1_pool',
'block2_conv1',
'block2_conv2',
'block2_pool']
"""
import h5py
weights_path = 'vgg19_weights.h5'# ('https://github.com/fchollet/deep-learning-models/releases/download/v0.1/vgg19_weights_tf_dim_ordering_tf_kernels.h5)
f = h5py.File(weights_path)
list(f["model_weights"].keys())
"""
['block1_conv1',
'block1_conv2',
'block1_pool',
'block2_conv1',
'block2_conv2',
'block2_pool',
'block3_conv1',
'block3_conv2',
'block3_conv3',
'block3_conv4',
'block3_pool',
'block4_conv1',
'block4_conv2',
'block4_conv3',
'block4_conv4',
'block4_pool',
'block5_conv1',
'block5_conv2',
'block5_conv3',
'block5_conv4',
'block5_pool',
'dense_1',
'dense_2',
'dense_3',
'dropout_1',
'global_average_pooling2d_1',
'input_1']
"""
# 列出模型中的所有层的名称
layer_names = [layer.name for layer in model.layers]
"""
# 提取`.h5`文件中每层的模型权重
>>> f["model_weights"]["block1_conv1"].attrs["weight_names"]
array([b'block1_conv1/kernel:0', b'block1_conv1/bias:0'],
dtype='|S21')
# 将这一数组分配给weight_names
>>> f["model_weights"]["block1_conv1"]["block1_conv1/kernel:0]
# 列表推导(weights)储存层的权重和偏置
>>>layer_names.index("block1_conv1")
1
>>> model.layers[1].set_weights(weights)
# 为特定层设置权重。
使用for循环我们可以为整个网络设置权重。
"""
for i in layer_dict.keys():
weight_names = f["model_weights"][i].attrs["weight_names"]
weights = [f["model_weights"][i][j] for j in weight_names]
index = layer_names.index(i)
model.layers[index].set_weights(weights)
import cv2
import numpy as np
import pandas as pd
from tqdm import tqdm
import itertools
import glob
features = []
for i in tqdm(files_location):
im = cv2.imread(i)
im = cv2.resize(cv2.cvtColor(im, cv2.COLOR_BGR2RGB), (256, 256)).astype(np.float32) / 255.0
im = np.expand_dims(im, axis =0)
outcome = model_final.predict(im)
features.append(outcome)
## 收集这些特征,创建一个dataframe,在其上训练一个分类器
以上代码提取block2_pool特征。通常而言,由于这层有64 x 64 x 128特征,在其上训练一个分类器可能于事无补。我们可以加上一些全连接层,然后在其基础上训练神经网络。
增加少量全连接层和一个输出层。
为靠前的层设置权重,然后冻结。
训练网络。
4. 新数据集很大,和原数据很不一样
由于你有一个很大的数据集,你可以设计你自己的网络,或者使用现有的网络。
你可以基于随机初始化权重或预训练网络权重初始化训练网络。一般选择后者。
你可以使用不同的网络,或者基于现有网络做些改动。
-
机器学习
+关注
关注
66文章
8116浏览量
130546 -
深度学习
+关注
关注
73文章
5236浏览量
119895
原文标题:基于Keras进行迁移学习
文章出处:【微信号:jqr_AI,微信公众号:论智】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
杨强教授:从机器学习到迁移学习
什么是迁移学习?迁移学习的实现方法与工具分析
基于稀疏编码的迁移学习及其在行人检测中的应用
【木棉花】学习笔记--分布式迁移
【木棉花】学习笔记--分布式迁移+回迁
迁移学习
基于局部分类精度的多源在线迁移学习算法
吴恩达:将引领下一波机器学习技术”的迁移学习到底好在哪?

迁移学习与模型预训练:何去何从

基于迁移学习与图像增强的夜间航拍车辆识别
基于迁移深度学习的雷达信号分选识别
迁移学习Finetune的四种类型招式
一文详解迁移学习

视觉深度学习迁移学习训练框架Torchvision介绍






 工商网监
工商网监
评论