 对焦稳定控制算法试验平台的搭建和研究测试
对焦稳定控制算法试验平台的搭建和研究测试
1 引言
如今市场对于手机拍照功能的需求可谓是日新月异,这对于手机摄像头的数量及质量都提出了更高、更复杂的要求。在摄像头驱动领域,如何控制镜头实现快速而稳定的对焦至关重要。手机中控制镜头对焦的器件为音圈电机(VCM)。
音圈电机(VCM)基于安培定理工作,即当线圈导电,其中的电流产生的作用力推动固定在载体上的镜头移动,从而改变对焦距离。可以看到,VCM器件对于对焦距离的控制实际上是通过对线圈中电流的控制来实现的[2]。常见的 VCM 驱动电路。
VCM 驱动电路实际上是一个带控制算法的 DAC电路。它可以将 I2C 总线上传来的包含数字位置信息的 DAC code 转换成对应的输出电流(DAC code 对应的输出电流);再通过 VCM 器件将输出电流转化为对焦距离[3]。不同的输出电流经过音圈电机形成回路,产生不同的安培力,该力推动音圈电机上面的 Lens 运动。音圈电机上 Lens 镜头的运动在停止前会产生阻尼振荡,而阻尼震荡的大小直接影响到 Lens 的稳定性。阻尼震荡越大,Lens 稳定性越差,因此镜头在对焦过程中不易捕捉清晰点,容易产生失焦。反之,阻尼震荡越小,Lens 的稳定性越好,从而镜头在对焦过程中更加容易稳定在焦点处。如果镜头是自由的阻尼振荡,对焦的时间将相当漫长。为了实现快速稳定地对焦,需在 VCM 驱动电路数字系统中加入抑制阻尼震荡的算法。这个算法对于手机摄像头效果至关重要,只有使用最优化的对焦快速稳定控制算法,才能保证快速而精准的手机拍照对焦。
2 对焦稳定控制算法试验平台的搭建和配置
为验证和试验不同算法的效果,找出最优算法,可搭建试验验证平台。
在的测试平台中,主要由应用系统和测试系统两部分组成。应用系统中,用 VC 语言编程送出指令给 MCU 产生 I2C 信号;经 FPGA 后产生包含对焦稳定控制算法的时间间隔可控的并行数字控制信号;再经过 DAC 将这些并行数字信号转换成不同时序的电压;最后经过 DRIVER 将不同时序的电压转换成相应的不断变化的驱动电流。由此来控制摄像头模组中的 VCM 器件不断地变化镜头位置以进行对焦。
测试系统中,主要是利用带电流探头的多通道示波器,分别对 FPGA 输出的数字指令,DAC 输出的电压以及驱动输出的电流进行监测。最后通过激光测距仪来监测镜头的位置移动情况。在对焦控制的研究中,通常采用激光测距仪来探查镜头位置的动态响应和细微变化,激光测距仪可以将镜头的位移距离转化为电压值输出。
在验证系统的试验平台中,我们具体选择的配置如下。
(1)MCU 单片机,32 位单片机。
(2)FPGA,可采用 XILINX Spartan-6 FPGA 核心板。
(3)DAC,选用 10-bit DAC 芯片。
(4)DRIVER:DRIVER 的设计可以采用一个放大器和一个功率 MOSFET 外加采样电阻构成。
(5)摄像头模组,常见的摄像头模组分为单端开环,双端中置,近年来还有带霍尔校准和带光学防抖的。本实验平台使用基础的单端开环音圈电机,然而这些方法也可以扩展到其他电机上。
(6)带电流探头的多通道示波器,需要四通道示波器,其中一个通道接电流探头。
(7)激光测距仪,可采用基恩士激光测距仪,它的转化倍率是 10 mV/μm。
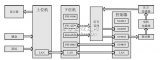
这一算法试验平台的主体部分的具体硬件配置如图 4 所示。
在试验平台的具体硬件实现时,首先 MCU 可以采用 32 位单片机,通过计算机对 32 位单片机使用 VC 语言进行编程控制,产生符合格式要求的I2C 数据,这一数据要包括控制模式和十位位移数据。I2C 数据再通过 XILINX Spartan-6 FPGA 核芯处理后生成带一定时序控制的并行的十位位移数据(D0-D9)。接着,通过一个 10-bit DAC 转成带有一定时序控制的控制电压信号 VC。之后,通过运放驱动功率 MOSFET 产生带一定时序控制的控制电流信号 IL。最后,IL 通过由 VCM 模组构成的负载(VCM 模组的构成如本文前述的图 1 所示),负载将在控制电流信号 IL 的控制下按照既定的时序和安培力移动实现精确对焦。
3 对焦稳定控制算法的研究与测试
搭建好上述对焦稳定控制算法试验平台后,便可以对不同算法的对焦速度和精度进行详细的研究。在对焦稳定时,如果能够施加一定的对焦控制策略,在不同的时刻给予不同的电流,即给予不同的安培力,就可以有效地减小镜头稳定所需的时间,使镜头位置快速落入焦点深度内,从而实现手机镜头的快速精确对焦。接下来研究三种对焦稳定控制模式。
3.1 直接对焦控制模式
如果没有控制算法,直接送出目标电流值,也就是常说的直接对焦模式,通过激光测距仪可以观测到镜头的阻尼振荡的测试波形如图 5 所示。从图 5 可以看出,如果没有控制算法,镜头的阻尼振荡大概需要 20 个周期甚至更长才能落入焦点深度以内[3,4],实现清晰对焦。当镜头目标位移点为 100 μm 时,镜头对焦落入有效的焦点深度的时间往往需要 150 ms 以上。
3.2 线性对焦控制模式
线性对焦稳定控制算法是一种比较常见的对焦控制算法。其做法是驱动电流线性增加,最终达到全目标电流,从而实现快速稳定对焦的目的。如图 6 所示,经过这一算法的控制后,过阻尼振荡的幅度大幅衰减,有效提高了对焦速度[5]。但到达稳定点后的幅度较大,对焦精度的控制有所欠缺。从图 6 可以看出,在镜头目标位移点为 50 μm 时,镜头对焦落入有效的焦点深度的时间大概需要 11.2 ms 以上。
3.3 双阶对焦控制模式
目前,业界最常用的优化对焦控制算法为双阶对焦控制模式。它的做法是先给出一半目标电流,当线圈振荡过目标位移点,达到最大位移点时,此时,线圈的速度接近于 0。马上切换成全目标电流。线圈的力正好在这一点达到平衡,从而实现快速稳定对焦的目的。这一对焦模式的关键在于准确控制电流的精度和切换的时间。保持和切换的时间要取决于线圈欠阻尼振荡的周期[5]。从图 7 中可以看出,在镜头目标位移点为 50 μm 时,镜头对焦落入有效的焦点深度的时间只需要 5.4 ms。
4 结语
本文通过所搭建的对焦稳定控制算法试验平台,分别对不同算法所产生的不同对焦模式进行了详细的研究。通过研究发现,在目前业界通用的对焦稳定控制算法中,使用双阶对焦稳定控制算法可使镜头稳定于焦深范围内所需的时间最短。但这远远不是最优化的对焦模式。
近年来,人们研究了多种多阶的对焦模式,但是这些研究主要集中于建模计算和仿真验证中[4,6],本文提供的对焦稳定控制算法研究试验平台正好可以作为这些研究的试验和验证工具。借助这一工具,可以具体实际地看到各个对焦稳定控制算法的优缺点,为这一领域的研究提供了直观便利的观测平台。
本文只是提供一种手机对焦快速稳定算法研究与验证的方法和示例,基于这一实验平台可以验证更多的对焦稳定控制算法。对焦算法的研究需要结合力学,电磁学和各种数字和模拟电路的知识才能实现,本文为这一研究提供了工具和实例以方便更多的人对此进行探索,找到最优化的手机对焦稳定控制算法。
-
音圈电机
+关注
关注
4文章
419浏览量
17994 -
集成电路设计
+关注
关注
4文章
44浏览量
17582
原文标题:手机对焦快速稳定算法的研究试验平台与验证
文章出处:【微信号:appic-cn,微信公众号:集成电路应用杂志】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【TL6748 DSP申请】交流电机控制实验教学平台研究
寻找一个现成的PMSM控制算法验证平台?
Aigtek功率放大器应用案例—液晶透镜爬山自动对焦算法研究
使用matlab设计电机控制器与基于Matlab的PMSM电机控制系统虚拟开发平台设计
就SpinalHDL的测试平台搭建进行说明
ECU试验测试环境搭建和支持服务

测试环境的搭建和维护_软硬件测试环境
激光对焦压电方案,让对焦更高速!






 工商网监
工商网监
评论