 傲酷公司独创的4D毫米波雷达性能媲美低线束激光雷达
傲酷公司独创的4D毫米波雷达性能媲美低线束激光雷达
毫米波雷达并不是个新鲜事物,早在上世纪60年代,美国就开始在车载领域应用毫米波雷达,但当时的工艺水平较低,应用的是单天线,前端只能一收一发,其频率只有10GHz。而且,这种雷达装置配备在车辆的前方并不美观。
随着技术的进步,雷达的频率不断提升,天线尺寸也越来越小。在1992年,美国交通部门在灰狗公交车上安装了1500套毫米波雷达,到1993年取得了立竿见影的效果,让交通事故发生率下降了25%。
目前,全球的毫米波雷达市场几乎由国外厂商所把持,尤其77G毫米波雷达,技术难度大,核心技术及出货量主要集中在比较知名的Tier 1手中。现在全球前四大的毫米波雷达供应商被称为“ABCD”,即 Autoliv(美安)、Bosch(博世)、Continental(大陆)和 Delphi(德尔福)。他们年出货量总和达到千万级别,且价格便宜。
但,除了全天候和低成本的优势,传统毫米波雷达也有其技术的局限性,比如无法点云成像,精度低。这些指标通常是出现在自动驾驶领域,由激光雷达体现,只是由于多种因素,激光雷达难以短时间内量产普及。因此,寻找一种低成本可靠的高精度传感器,就成了业内焦点。
傲酷雷达(Oculii)在全球首创了车载4D雷达及高清点云成像雷达。现在研发中的高清点云雷达,成像效果将可与16线激光雷达媲美。下一步随着点的密度增加,甚至可以达到64线激光雷达的效果 。
公司成立以来,得到投资界大咖们一路追捧,已获得柳传志、周鸿祎、汪潮涌、曾李青、王利杰旗下的基金投资以及三星集团的投资。
除了在全球市场顺利开拓外,正在中国市场重点布局前装L2-L4自动驾驶、“两客一危”、ITS等领域,已和多家国际国内Tier-1厂商达成投资和战略合作意向,很多主机厂对使用傲酷的点云成像雷达在L3-L4上的应用充满期待。
傲酷雷达创始人在美国有近30年雷达教学与创业经验。核心团队深厚的雷达领域经验积累,使公司在技术上不断挑战毫米波雷达的技术天花板,产品上首创出精度越来越高的点云成像雷达。
前高德负责移动业务群的副总裁郄建军,曾经一手打造高德地图APP,从零起步做到几亿用户,现担任傲酷公司全球CMO,中国及亚太区总裁。近期采访到郄建军,他向我们介绍了傲酷公司的一些基本情况。
傲酷公司全球CMO,中国及亚太区总裁郄建军
独创的4D毫米波雷达
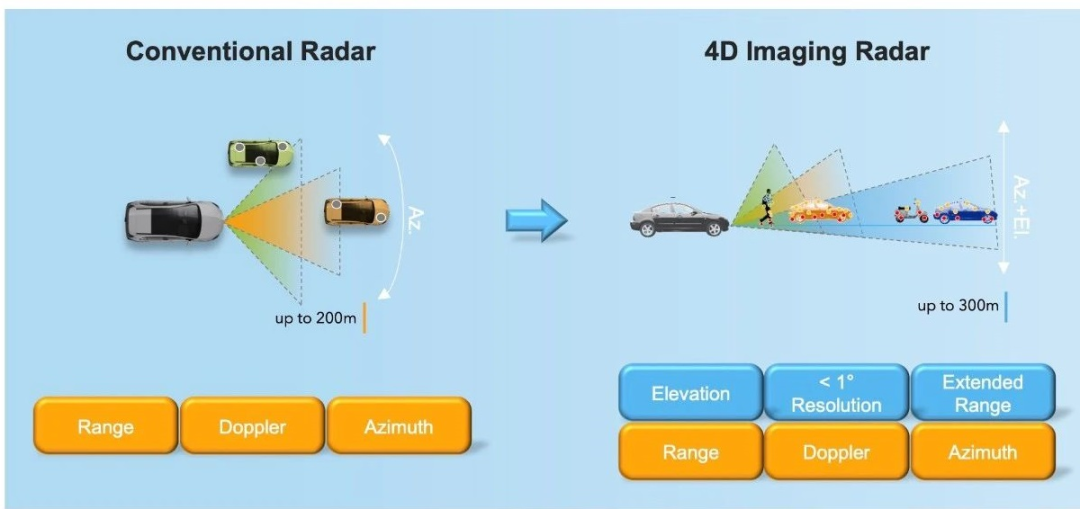
4D雷达就是能测量目标物体的3D坐标+1D速度。传统毫米波雷达通过测量目标的距离和角度得出2D平面坐标以及速度,没有高度坐标,因此可以简单理解为平面雷达。一般应用情况下,做AEB、ACC等应用功能是够用的。
但是做无人驾驶等应用时,视频和激光雷达都是对目标物体的3D立体坐标进行探测,而传统毫米波雷达只能对物体的2D平面坐标探测,当做多传感器数据融合时出现了其他传感器是立体坐标,而毫米波是平面坐标的矛盾。这时标定和数据融合都比较难。
4D毫米波雷达多了一个高度维度,能探测物体的3D坐标数据,和视频及激光一样,数据融合非常容易,融合精度也非常高。另外,沿路空中的物体,如天桥、红绿灯、路牌等都在高处,传统毫米波雷达没法探测出来。
而有了4D雷达后就很容易做到。4D雷达比普通毫米波雷达多了纵向天线及处理器,可以检测不同高度,不同水平面上的运动和静止物体。
2015年下半年,傲酷推出了世界上第一款商用的24G 4D雷达,针对智能交通应用。2017年下半年,傲酷又推出了77G的4D雷达。目前已经开始小规模量产,接下来准备在国内进行大规模车规量产。
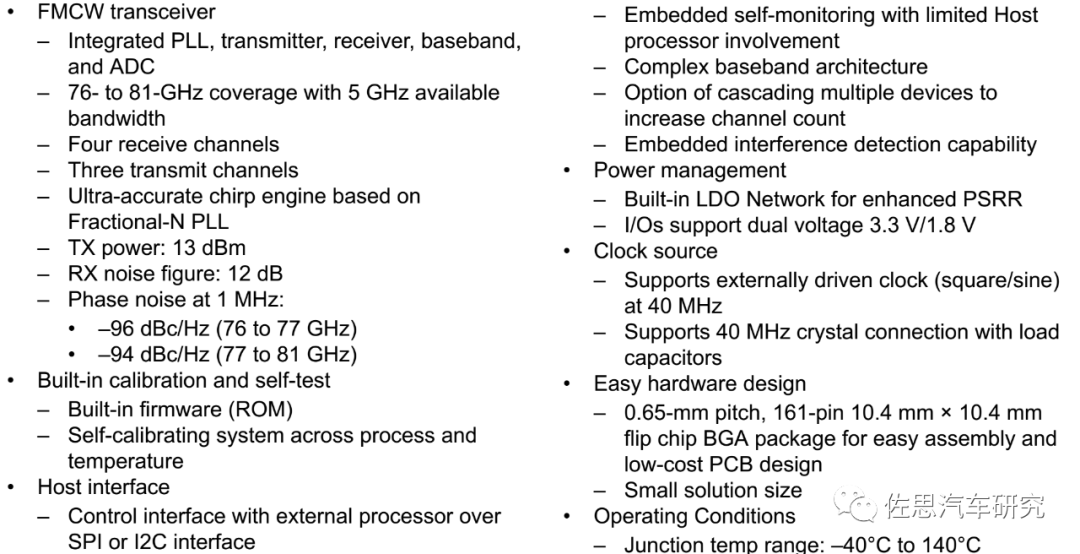
由于采用了TI的CMOS单芯片解决方案,其77G 4D雷达可以做到火柴盒大小,是ABCD雷达的一半大小。长距雷达测距能达到250米,角度分辨率小于3度,行人和自行车检测性能突出。
很明显,傲酷产品性能已经达到和超过ABCD雷达的性能水平。尤其值得关注的是,傲酷的雷达对动态和静止物体的都能很好地连续跟踪。克服了传统毫米波雷达对静止目标容易漏检的短板。
性能媲美低线束激光雷达
跟激光雷达相比,毫米波雷达的测距和测速上性能和精度上完美,加上价格100美金左右,车载已经大规模使用,全天候工作,这些方面优点突出。 但激光雷达能做点云成像,环境3D建模。尤其是角精度很高,达到0.1-0.2度。这两点完美碾压传统毫米波雷达。
业界普遍认为,L4必须有激光雷达,但L2-L3如果上激光雷达不现实。价格高、车规不成熟等直接制约着激光雷达在这个阶段的广泛使用。如果在L2-L3上用毫米波雷达做到类似激光的效果,应用场景会非常丰富。
傲酷的4D高清点云雷达就是在这个方向的尝试。这里边最难的技术是,毫米波雷达如何增加角分辨率,从传统的3度角分辨率提高至1度甚至0.1度。
理论上来说,增加角分辨率的直接做法就是增加天线数量,军用雷达动辄上百个天线,使得其角分辨率很高。但车载雷达体积尺寸受限,不能简单靠加天线去做这件事。
傲酷的做法是在不增加物理天线数量的情况下,采用软硬件虚拟的方法,用几根天线模拟出几十上百根天线的效果,从而达到接近或等同激光雷达的角分辨率。
点云的方式是激光雷达获取周边物体外形的重要方法,毫米波也可以用点云的方式做同样的事情。电磁波发射到周边一个物体上,会有多个反射点。如果都加以跟踪利用,就可以不止测到物体,可以看出其大概轮廓。
如果以上模拟出的多天线发射,可以把发射波大幅度加密,反射点就会更密,这时物体的轮廓就看的更清楚,类别分的更清楚。高清点云成像基本就是这个原理。
傲酷现在可以做到单个雷达2-3万个点,一圈4个雷达下来算下来可以到10万点云,达到8线激光雷达的点云成像水平。短期内的目标是一个雷达5万个点,一圈下来20万个点。基本上能达到类似16线激光雷达的成像水平。
目前在全世界市场,能拿出同类产品做Demo的绝无仅有,傲酷在这一块属于全球领先的水平。
点云毫米波雷达的自动驾驶应用
对于毫米波雷达的前景,郄建军十分看好。他认为毫米波雷达在L1-L5都是三大传感器之一,是必需品和标配, 只靠全天候工作这一招就可以稳立不败之地。
哪怕激光雷达有一天价格降下来和车规很成熟,但天气对性能的影响是其先天不足。摄像头性能对天气的敏感就更不用说了。三大传感器是功能互补,在L4-L5阶段应该都是不可或缺的。L2-L3阶段,毫米波+摄像头即够用。
在L2-L3阶段,毫米波雷达的作用现在被低估,功能还没有被充分挖掘。比如AEB/ACC里,毫米波雷达可以作为主传感器,摄像头是配角。特斯拉在当时出事故后,毫米波雷达由配角变成主角。毫米波在测距、测速方面的优点在AEB/ACC里可以发挥的淋漓尽致。
Uber的最近出的交通事故后,业界对行人的监测的重要性认识提到前所未有的高度。同时也看到摄像头、激光雷达在特殊天气条件下的局限。
其实毫米波雷达在行人监测方面大有可为。傲酷的前向长距雷达可以测到100米左右的行人。这样不论天气如何,行人的安全性有了更大的保障。
尤其在L3阶段,自主泊车、堵车跟车等功能都是在城市道路上的功能,周边环境非常复杂,汽车、行人、单车、电动车混杂在一起。光靠摄像头感知是远不够的,需要有更好的传感器组合。
而激光雷达由于各种因素制约不能用,高清点云毫米波就可以起到非常大的作用。比如自主泊车时,摄像头用的鱼眼摄像头得到了360度环视效果,但对周边的物体的距离和速度测量,比普通摄像头误差更大,可测距离更近。这时周边的汽车、行人、自行车等环境很复杂时,做决策就风险很大。
点云毫米波雷达就可以把摄像头的短板很好地补上,对周边复杂环境可以3D实时建模,对行人车辆的精准距离和速度监测。摄像头在大雨、黑天、逆光下的性能下降,也可以被点云毫米波补上。这样摄像头+点云毫米波成为L3功能的最佳传感器组合。
性价比决定前装市场
郄建军介绍傲酷正在和许多主机厂和Tier1、ADAS厂商等全面沟通,配合大家的项目需求。这次随高工智能汽车全国巡回走访主机厂和Tier1,也得到了非常积极的市场反馈。
大家对77G 4D雷达评价普遍不错,希望用以填补ABCD的市场缺口。由于用了TI的CMOS单芯片解决方案,其量产价格可以做到比ABCD的现有毫米波雷达价格更低。其完全开放的接口,容易的数据融合等使许多Tier1和主机厂愿意用其雷达做AEB/ACC等L2功能。
主机厂和Tier1对傲酷的高清点云雷达的期待很高。很多人都在为L3阶段是否要硬着头皮上激光雷达而纠结。有了点云毫米波雷达,L3碰到的复杂周边环境, 摄像头+点云毫米波完美融合后就可以很好地解决。应用潜力非常巨大。
郄建军表示,公司正在国内全面布局,希望和主机厂和Tier1一起共同发展,把L2-L4的市场搞好,为中国的自动驾驶产业发展添砖加瓦,贡献应有的力量。
-
雷达
+关注
关注
48文章
2670浏览量
115514 -
激光雷达
+关注
关注
958文章
3628浏览量
186507
原文标题:敢跟LiDAR叫板的4D毫米波雷达,准备抢“ABCD”的饭碗 | GGAI独家
文章出处:【微信号:ilove-ev,微信公众号:高工智能汽车】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
激光雷达与毫米波雷达的区别与联系
激光雷达和毫米波雷达的区别 哪个才是自动驾驶感知的最优选择?
对比ZF和特斯拉的4D毫米波雷达设计,国产4D毫米波雷达迅速崛起
深度聊聊4D毫米波雷达技术及发展
一年融两轮,这家公司逐鹿泛自动驾驶激光雷达赛道
自动驾驶传感器中如何现在激光雷达和毫米波雷达?

4D成像雷达专栏 | 4D高分辨毫米波雷达概述


特斯拉早期所用的毫米波雷达
蔚来自研4D毫米波雷达的原理解析






 工商网监
工商网监
评论