 基于自然坐标系SVPWM理论分析
基于自然坐标系SVPWM理论分析
400 Hz中频电源作为军用雷达、航电设备和部分装甲车辆设备的基准电源之一[1-2],其电能质量水平关乎武器装备性能,中频电源的主要负载为电机类负载,大部分工况下处于不平衡的负载状态,而传统中频电源带不平衡负载能力较弱,稳定性和可靠性较差,因此研究中频逆变电源有很重要的意义。
三相四桥臂逆变拓扑即在传统三相全桥逆变的基础上增加了一个第四桥臂,将三相负载的中性点与第四桥臂的中点相连,通过第四桥臂来控制中性点电压,使三相四桥臂逆变器可以产生三相独立的电压,使逆变器具有稳定三相电压对称输出的能力。这种逆变拓扑具有控制方法灵活、直流电压利用率高和无需并联大的直流电容的优点,避免连接中点形成变压器,大大减少逆变器的体积重量,减少对各类武器系统、装甲车辆和航空平台有限体积的占用,因此得到广泛的重视和研究。
三相四桥臂逆变拓扑的调制策略主要有脉宽调制[3]、滞环电流控制[4]、空间矢量脉宽调制(Space Vector Pulse-Width Modulation,SVPWM)[5]等策略。其中SVPWM具有易实现数字控制和直流母线电压利用率高的优点,因此多应用于逆变器调制中。传统的基于αβγ坐标系的SVPWM策略[6-7],需要反复对三相电压电流进行坐标变换,运算过程复杂,且必须根据负载情况来确定参考电压,当负载突变或不明时,参考电压的轨迹无法确定,导致实时控制困难。文献[8]提出了一种基于abc自然坐标系的三维空间矢量脉宽调制技术,计算方法简单,并且可拓展到多电平三相四桥臂逆变器中进行运用,但参考电压的计算方法尚未给出。
本文基于自然坐标系的SVPWM技术,研究三相四桥臂逆变器的调制策略,通过建立分析四桥臂拓扑的平均电流模型,确定参考电压,并根据“伏秒平衡”原则计算参考电压的占空比。由于参考电压是根据负载电流实时计算出的,因此逆变器在三相不平衡负载条件下可稳定输出三相对称电压,且总谐波畸变率较小,并通过仿真和实验加以验证。
1
基于自然坐标系SVPWM理论分析
1.1 空间矢量及电压矢量的合成与选择
图1为三相四桥臂逆变器主电路拓扑。
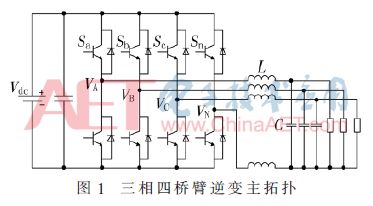
主拓扑有四对桥臂,每对桥臂对应两种开关状态,共组成24=16种开关组合状态,将各桥臂的开关状态用开关矢量Si表示:

上式中i=a,b,c,n,分别表示逆变器的A、B、C和N相。且需注意同一桥臂的上下两个开关器件不能同时导通,否则会出现桥臂直通现象,破坏开关器件。根据开关状态可得到电压矢量:

结合式(1),可得到逆变器的16种开关组合状态与空间电压矢量的对应关系,如表1所示。

表1的16种开关状态对应空间电压矢量描绘到abc自然坐标系中,可得如图2空间电压矢量图。
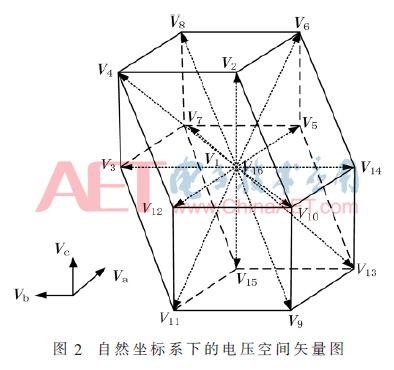
图2可看作是一个封闭十二面体,可用平面Va=0、Vb=0、Vc=0和平面Va-Vb=0、Va-Vc=0、Vb-Vc=0将十二面体分割为二十四个空间四面体,每个四面体由两个零电压矢量(V1、V16)和三个非零电压矢量构成。只要确定了参考电压矢量Vref落在哪个四面体中,即可用对应的空间电压矢量来合成。
为判断参考电压矢量落在某个四面体中,将该矢量与Va=0、Vb=0、Vc=0和Va-Vb=0、Va-Vc=0、Vb-Vc=0六个面进行比较,通过判断比较结果来确定合成参考电压矢量的四面体。利用二进制计数法,对六个比较结果进行加权计算,用以标记四面体,特做如下定义:
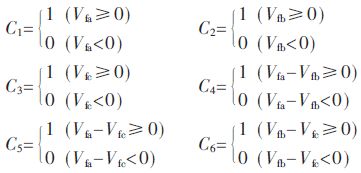
其中Vfa、Vfb、Vfc是参考电压矢量Vref归一化到abc自然坐标系下的量,指针函数的表达式为:

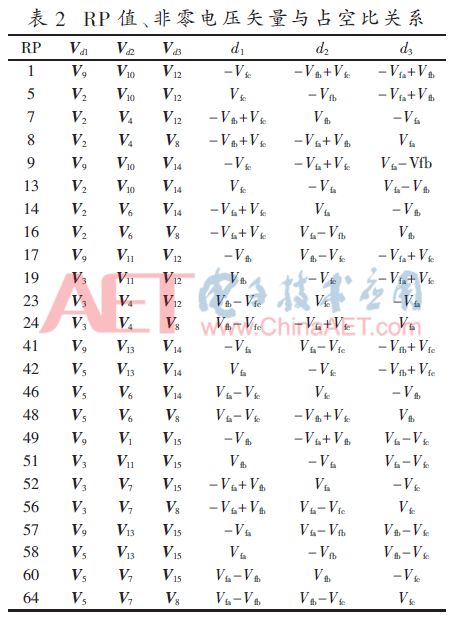
由式(2)计算得RP值见表2,其对应二十四个四面体,RP值确定参考电压矢量所在四面体,选择该四面体的非零矢量和零矢量合成参考电压矢量。
1.2 电压矢量占空比的计算
参考电压矢量由非零矢量和零矢量合成,开关电压矢量的作用时间可根据“伏秒平衡”原则求得:
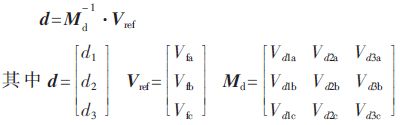
上式中Vd1、Vd2、Vd3为d1、d2、d3对应的非零开关矢量,且下标a、b、c分别表示开关矢量在abc坐标轴的投影值。确定了RP的值,就可根据参考电压得到合成的空间矢量和占空比,具体结果见表2。
由表2可知,通过计算RP值来确定空间四面体、开关电压矢量和占空比的策略,相比于在αβγ坐标系的占空比求取更简单,易于数字化控制技术的实现。
1.3 参考电压矢量的计算
建立abc坐标系下三相四桥臂逆变器平均电流模型[9],如图3所示,输出电压等效为受控电压源。
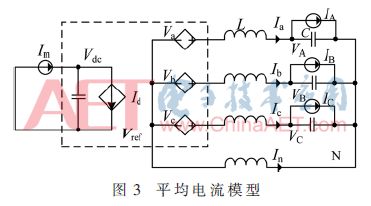
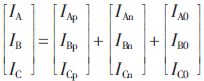
IA,IB,IC为等效成电流源的三相负载电流,可根据对称分量法将其分解为正序Ip、负序In和零序I0分量,下角标p,n,0分别表示正序、负序和零序。
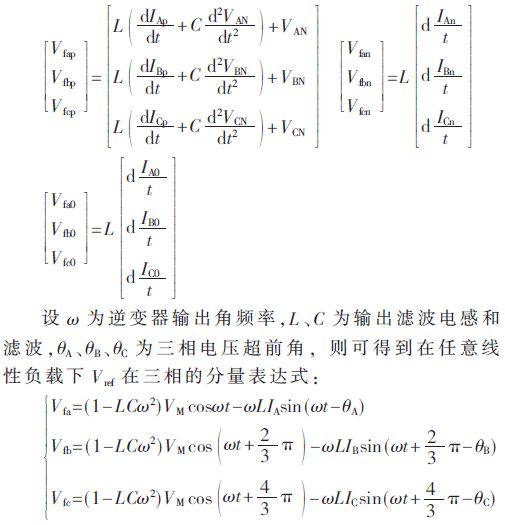
且三相电压、电流对称输出,VM表示输出电压的额定值,则三相电压表达式为:
由于三相电压等效图相同,以A相进行对称分量分析。图4为A相正序、负序、零序分量等效图。
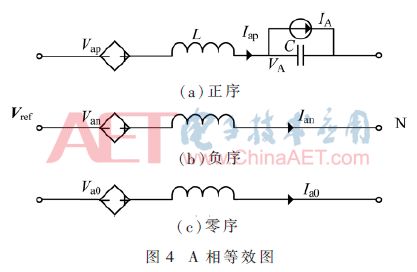
依据电路理论分析参考电压矢量Vref的正序、负序和零序分量则可表示为:
分析可知,只要检测三相负载电流即可得到参考电压,当负载变化时DSP可根据负载电流的变化计算出每相参考电压,从而控制三相电压对称输出。
2
仿真分析
为验证基于自然坐标系的SVPWM策略的可行性和有效性,使用仿真软件MATLAB/Simulink建立基于SVPWM策略的三相四桥臂逆变器仿真电路,具体仿真参数为:设计总输出功率为6 kV·A,直流侧输入电压300 V,功率器件开关频率为20 kHz,输出三相电压有效值为115 V,频率为400 Hz,输出滤波电路滤波电感1 mH,滤波电容20 μF。
主要在以下负载情况对逆变器进行仿真分析:(1)阻性不平衡负载;(2)阻感性和阻容性不平衡负载。
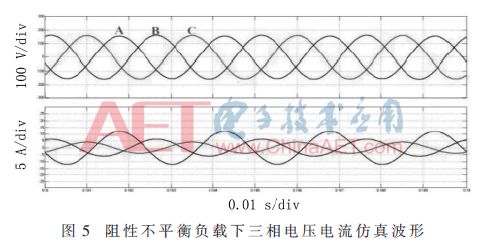
三相阻性不平衡负载分别为13 Ω、26 Ω和40 Ω,逆变器三相电压和电流的仿真结果如图5所示。
逆变器带三相阻感性和阻容性不平衡负载,其中A相13 Ω和10 mH感性负载,B相纯阻性负载13 Ω,C相13 Ω和10 μF容性负载,仿真结果如图6所示。
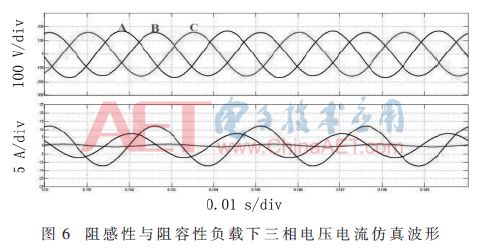
分析仿真结果可看出,基于自然坐标系SVPWM策略的三相四桥臂逆变器在不平衡负载条件下,三相输出电压波形较为对称,且经过仿真系统FFT分析三相电压波形的总谐波畸变率THD小于3%。
3
实验结果
为验证方案可行性,设计了一台实验样机,基于DSP(TMS320F28069)完成SVPWM策略对功率器件的矢量控制,其中实验样机的主要参数为:输出总功率为6 kV·A,输入直流母线电压300 V,输出电压有效值和频率为115 V/400 Hz,开关频率为20 kHz,输出滤波器的电感和电容值分别为1 mH和20 μF。主要测试了在不平衡负载下逆变器的输出能力,记录了不平衡负载下的三相电压电流和中线电流波形。
图7分别给出了三相不平衡阻感性和阻容性负载时,三相电压和A相电流波形,可见逆变器输出适应性强,在各种不平衡负载条件下均能使三相电压对称输出。
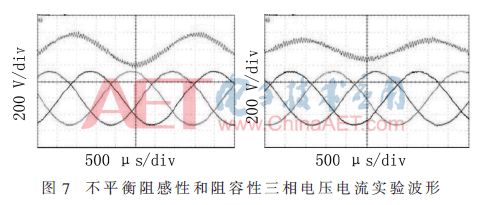
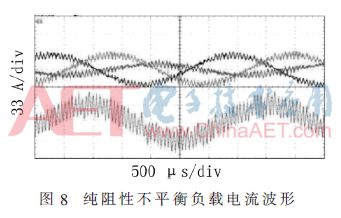
图8为纯阻性1/3不平衡负载下三相滤波和中线电感电流,由于电感影响电流存在较小脉动,中线电流脉动较为明显,但电压波形仍满足THD<3%。
4
结论
基于abc自然坐标系下的SVPWM策略的三相四桥臂中频逆变器与αβγ坐标系空间矢量调制相比,一方面省去了复杂的坐标变换,另一方面在空间四面体的选择和开关矢量占空比计算上也更简单,易于实现数字化控制和DSP程序编写。本文建立了三相四桥臂平均电流模型,分析并给出了空间参考电压的计算方法,最后经过仿真和实验验证了SVPWM策略的中频逆变器具有在不平衡和非线性负载下三相稳定对称输出的能力,具有一定的实用价值。
-
逆变器
+关注
关注
270文章
4237浏览量
201604 -
空间矢量
+关注
关注
1文章
24浏览量
11234 -
SVPWM
+关注
关注
14文章
611浏览量
90209
原文标题:【学术论文】自然坐标系SVPWM四桥臂中频逆变器调制策略研究
文章出处:【微信号:ChinaAET,微信公众号:电子技术应用ChinaAET】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论