 基于最近将深度强化学习应用于迷宫导航的研究
基于最近将深度强化学习应用于迷宫导航的研究
在每个人的童年时期,我们是如何学会记住自己家附近的路的?我们是怎样学会自己去朋友家、学校或者去小卖部的?在没有地图的情况下,我们可能只是简单地记住了某条路长什么样,凭记忆引导自己。慢慢地,我们逐渐熟悉了自己的日常活动范围,就变得有信心了,能知道自己身在何处,并且学习了新的更复杂的道路。偶尔你可能会迷路,但是凭借某个标志甚至太阳你又能找到正确的路。
在非结构化的环境中导航是智能生物的特有的功能,想要实现远程导航,首先要对空间进行内部探索,然后要识别地标,同时还要有强大的视觉处理能力。基于最近将深度强化学习应用于迷宫导航的研究,DeepMind的研究人员也提出了一种端到端的深度强化学习方法,他们让智能体在真实的城市空间中导航,无需地图,并且这种方法还能迁移到不同城市环境。
导航是一项重要的认知任务,它能让人类和动物在没有地图的情况下,穿越过一片阡陌纵横的区域。这种远距离导航可以同时进行自我定位(我在这里)和目标表示(我要去那里)。
在Learning to Navigate in Cities Without a Map这篇论文里,我们展示了一种交互式导航环境,利用第一人称视角的谷歌街景照片做素材,将其游戏化以训练AI。标准的街景照片,人脸和车牌都被模糊,无法识别。我们建立了一个基于神经网络的智能体,学习使用视觉信息在多个城市中导航。注意,这项研究关注的是一般导航,而非驾驶导航;我们没有使用交通信息,也没有对车辆控制进行建模。
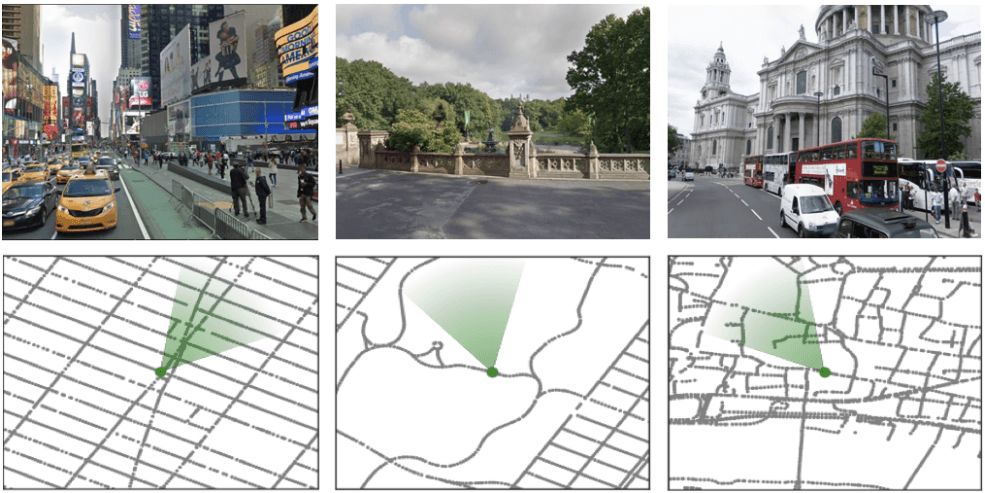
数据来源于真实街景。从左至右分别为纽约时代广场、中央公园和伦敦圣保罗大教堂
当智能体达到目的地时,它就会获得奖励(具体来说是一个经纬度坐标),就像一个没有地图的邮递员,要送无数的快递。随着时间的发展,智能体慢慢学会了用这种方法穿越整个城市。我们同样证明了智能体可以学习多个城市的道路,并且这种学习方法能有效迁移到新的城市中。
在没有地图的情况下学习导航
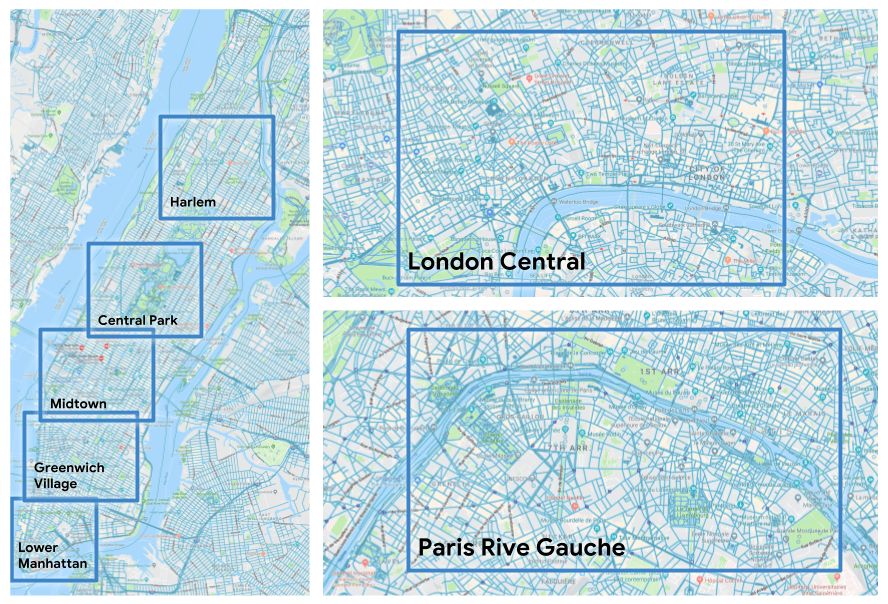
我们不使用传统的依赖外部映射和探索的传统方法,而是让智能体学习像人类一样导航,不用地图、GPS定位或其他辅助工具,只用视觉观察。我们创建了一个神经网络智能体,向其中输入在环境中观察到的图像,并预测它在该环境中执行的下一项操作。我们使用深度强化学习对其进行端到端训练,类似最近让智能体在复杂的3D迷宫中学习导航的研究,以及用无监督辅助方法玩游戏。与迷宫不同,我们利用真实的城市数据,例如伦敦、巴黎和纽约的复杂交叉路口、人行道、隧道和各种城市道路。此外,我们使用的方法可以迁移到不同城市,并可以优化导航行为。
模块化神经网络
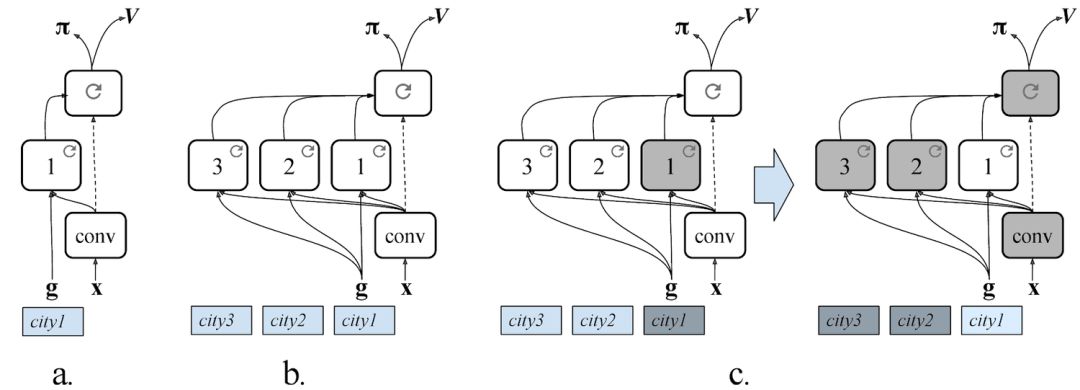
我们智能体的神经网络包括三个部分:
能够处理图像并提取视觉特征的卷积网络;
一个特定场所的循环神经网络,在内部进行对环境的记忆并学习表示“这里”(智能体的当前位置)和“那里”(目标位置);
一个位置不变的循环网络,能够根据智能体位置的变化进行导航。
特定场所的模块被设计成可互换的,并且正如其名,对于每个城市都是唯一的,而视觉模块和策略模块是不随着场景而变换的。
就像谷歌街景的界面一样,智能体可以在原地打转,也可以向前进入到下一个场景。但与谷歌地图和街景不同的是,智能体看不到小箭头、局部或全景地图以及标志性的街景小人,它还需要学习区分开放道路和人行道。目的地可能是几公里以外的地方,智能体需要搜索几百个全景图才能到达。
我们证明了这种方法能提供一种机制,将导航知识迁移到新城市中。和人类一样,当智能体来到一个新城市,我们会希望它学习一组新的地标,但不必重新学习它的视觉表现或行为(例如,沿着街道向前缩放,或者在交叉路口转向)。因此,使用MultiCity架构,我们在许多城市进行首次训练,然后冻结策略网络和视觉卷积网络,并在一个新城市中建立唯一一个新的特定地区路径。这种方法让智能体在获取新知识的同时不忘之前学到的东西,类似渐进式神经网络架构。
学习导航是人工智能领域的基础,试图在智能体中复制导航功能还可以帮助科学家了解其生物学基础。
-
神经网络
+关注
关注
42文章
4562浏览量
98645 -
导航
+关注
关注
7文章
502浏览量
41470 -
人工智能
+关注
关注
1775文章
43715浏览量
230489
原文标题:无需地图,DeepMind让智能体在城市中自我导航
文章出处:【微信号:jqr_AI,微信公众号:论智】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
FPGA在深度学习应用中或将取代GPU
什么是强化学习
NeurIPS 2023 | 扩散模型解决多任务强化学习问题
智能轮椅导航定位的研究现状及趋势
模拟矩阵在深度强化学习智能控制系统中的应用

基于强化学习的目标检测算法案例

什么是深度强化学习?深度强化学习算法应用分析



基于深度强化学习的视觉反馈机械臂抓取系统

ICLR 2023 Spotlight|节省95%训练开销,清华黄隆波团队提出强化学习专用稀疏训练框架RLx2







 工商网监
工商网监
评论