 自动驾驶是不是“太快”了?更激起国内同行的广泛议论
自动驾驶是不是“太快”了?更激起国内同行的广泛议论
自动驾驶的美好愿景在近两年一直被全社会所憧憬和努力去实现,然而日前Uber首例自动驾驶车辆在公开路面撞伤行人致死的案例却引人深思:这场以生命安全为出发点的探索,自动驾驶是不是“太快”了?更激起国内同行的广泛议论。
最担心的事故接连发生
美国时间3月18日晚上10点左右,Uber的一辆自动驾驶汽车在亚利桑那州Tempe市发生交通事故,与一名正在过马路的行人相撞,行人在送往医院后不治身亡。Uber车辆在撞上该名行人时,正处在自动驾驶状态,这是史上首例自动驾驶车辆在公开路面撞伤行人致死的案例。一份声明中表示,Uber车辆在发生事故时处于自动驾驶模式,车上后排有一名安全员司机。
无独有偶,作为百年汽车品牌的奔驰上演着“惊魂极速”。3月14日晚上,河南焦作车主薛先生驾驶奔驰200L轿车,在连霍高速上开启定速巡航(不用踩油门踏板就自动以固定车速行驶)后,发现车辆失控,只能以时速120公里的速度继续飞驰。庆幸的是,在河南、陕西两省高速交警紧急施救以及奔驰售后后台操作下,奔驰车在失控近一小时后,终于安全停下。
多重传感器保安全 为何全失效?
尽管这起悲剧有可能是行人的责任,但Uber的自动驾驶技术仍难辞其咎。事故发生后,Uber已经停止了在凤凰城、匹兹堡、旧金山及加拿大多伦多四地的自动驾驶汽车路测活动。
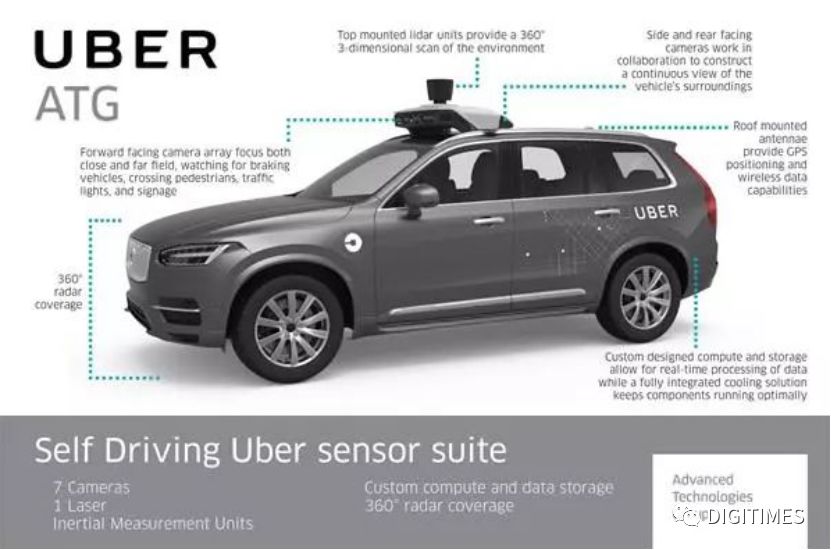
据悉,Uber的自动驾驶测试车由摄像头、毫米波雷达、激光雷达和IMU等传感器组合而成。位于Uber测试车顶部的激光雷达,每秒就能够生成几次汽车周围的3D图像。不论是在白天还是黑夜,通过反射回来的红外激光脉冲,激光雷达能够清晰地检测出不论是静止还是移动的物体。
激光雷达成像案例
毫米波雷达则是利用无线电波来检测物体,因此精度会相对低一些,作用范围也小一些。这个传感器的作用主要是用于辅助激光雷达,识别大型物体。虽然雷达对人的识别能力还不高,但在事故中,可能还是检测到了行人。
摄像头负责检测,例如交通信号灯、行人等。摄像头捕捉到的信息需要经过复杂的计算机图像识别算法进行识别。但是摄像头在夜间的信息捕捉能力受光照影响,相对较弱。
而上述这些传感器中获得的信息并不是相互独立的。在自动驾驶系统中,有一个核心计算单元,会将所有传感器中获得的信息进行融合处理。在某些情况下,工程师会写一些具体的规则来定义汽车在特定情况下应该如何应对。例如,如果汽车检测到红灯,它的程序就会命令车辆停止。然而自驾车搭载了如此完备的传感器,为什么在事故发生前没有检测到行人?
有一种猜测是计算机系统和软件出现了问题;另一种说法是,目前市面上能满足车规的远距离激光雷达产品在恶劣光照情况下的感知距离都不超过50米,Uber的自动驾驶汽车当时车速为38英里/小时(约61公里/小时),即这辆车是以16.6米/秒的速度前行,3秒之内需要人/车做出反应并停下来。目前正派遣一个小组来调查这起事故。
类似事故 打击消费者信心
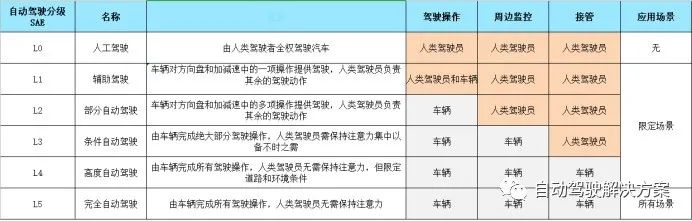
2013年,美国机动车工程师学会(简称SEA)将汽车自动化分为6个级别,L0到L5级。现在车企推出的大多是L2或介于L2与L3之间的自动驾驶汽车,而本次Uber改装的沃尔沃XC90处于L4级:在特定道路和环境条件下,由自动驾驶系统完成所有驾驶操作,当遇到紧急情况,应及时响应,司机可对系统干预。
在本次事故中,自动驾驶依照既定程序而没有做出刹车动作。同时,当时这辆无人驾驶汽车以40英里的速度前行,撞倒了行人,坐在汽车后排的观察员也没有采取任何行动。
美国杜克大学工程师Missy Cummings认为,无人驾驶汽车的系统仍然不完美。如果在基础研究方面还有新的问题冒出来,那就不应该大规模推广,因为时机不成熟。此次Uber事故会严重打击了消费者对技术的信心,推迟商业化并破坏乐观情绪。
引国内自驾车业者广泛议论
对此,事故也引发国内自驾车领域广泛的议论。奇点汽车美国公司总裁、前百度美研中心资深架构师黄浴博士认为,事故原因应该是决策处理上优先级不够。当遇到紧急情况时,未向人类进行响应反馈。
地平线机器人创始人余凯则认为,自动驾驶技术的研发进程不会一帆风顺,重要的是整个业界需要从事故中分析原因,使得系统安全性进一步提升。新技术企业一定要对生命安全有敬畏之心,避免过分乐观,而是踏踏实实投入技术研发,特别是安全性的测试验证。
此事故就像人类推进航空事业的历史也曾付出代价一样,但人类推进自动驾驶让交通出行更安全更便捷的时代趋势不会改变。自动驾驶技术成熟一蹴而就不会,也不会因为出现几次事故就停止前进的步伐。
Minieye CEO刘国清也表示,自动驾驶路测的目的就是为了发现技术漏洞。自动驾驶的每一次“脱离”(disengements)的场景都会被作为极端案例“corner case”记录下来,交由工程师去解决或者优化,所以每一次“脱离”都是对自动驾驶的推动。如何能够为更为高效和低成本获取这样的极端场景,对自动驾驶的发展或有巨大意义。
纵目科技市场与商务副总裁陈超卓则提出,未来几年内能落地的自动驾驶只有两种地理围栏:高速简单场景和低速园区场景。没有地理围栏的自动驾驶,10年内恐怕落不了地。陈超卓认为,这两个场景正是符合当前社会预期的两个方向。
-
自动驾驶
+关注
关注
773文章
12992浏览量
163117 -
Uber
+关注
关注
0文章
405浏览量
35999
原文标题:自驾车将“放慢” Uber事故“一石激起千层浪” 引国内同行议论
文章出处:【微信号:DIGITIMES,微信公众号:DIGITIMES】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
未来已来,多传感器融合感知是自动驾驶破局的关键
LabVIEW开发自动驾驶的双目测距系统
自动驾驶算力是不是越高越好?

自动驾驶“十问十答”

农机自动驾驶显示系统组成部分以及配置
【KV260视觉入门套件试用体验】八、VITis AI自动驾驶多任务执行MultiTask V3
数据驱动的自动驾驶

自动驾驶中的机器学习
自动驾驶产业链全梳理
自动驾驶基础架构


探讨自动驾驶系统感知系统





 工商网监
工商网监
评论