 哈佛大学的研究人员以日本古老的剪纸艺术kirigami为设计灵感,研发出新型软体机器人
哈佛大学的研究人员以日本古老的剪纸艺术kirigami为设计灵感,研发出新型软体机器人
近日,哈佛大学的研究人员以日本古老的剪纸艺术kirigami为设计灵感,利用具有感应结构的可变形材料来模拟蛇鳞,从而研发出一种新型软体机器人。该机器人能够像蛇一样,通过反复的充气、放气来爬行,可用于搜索和救援等任务。
研究人员利用蛇鳞“各向异性摩擦”的特性,将该机器人的重复性脉冲运动转变为向前运动。为了测试机器人鳞片皮肤,研究人员制作了多种不同的可拉伸塑料片,并在每片上用激光刻上不同的扁平鳞片图案,然后将该片材缠绕在由空气驱动的硅橡胶管周围。这种结构能够在机器人充气并拉伸塑料片时,使其扁平的鳞片变形并从身上弹出来抓住地面,并通过不断的充气、放气,从而向前移动。
为找到最佳的鳞片切割模式,以让机器人更好地前行,研究人员尝试了一系列不同的比例模型,包括线条、梯形、三角形以及圆形。实验证明,对于这款机器人来说,最有效的鳞片设计是梯形。梯形不仅能够产生更多的摩擦力,而且这种形状能够让机器人皮肤得到更多地伸展。当机器人处于充气状态时,则会向前伸展,使其鳞片弹起并抓住表面,这个过程中产生的摩擦推动机器人前进,这使得机器人在移动过程中,能够产生更长的“步幅”。当机器人向前移动时,只要鳞片设计能够有效地将其锚定在地面上,就能以拉伸的形式进行快速移动。
研究人员表示,这种可变的塑料性皮肤可在两方面影响机器人反应速度:一方面,这种皮肤增加了爬行机器人在刚开始充气时的延伸长度;另一方面,在整个驱动过程中,其永久的方向纹理结构可产生高度的“各向异性摩擦”特性。因此,当供气量在0-12ml之间循环变化时,该爬行机器人的运动效率最佳。
-
机器人
+关注
关注
206文章
27004浏览量
201353 -
驱动
+关注
关注
11文章
1717浏览量
84336
原文标题:哈佛大学研发出新型软体机器人
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
高压放大器在介电弹性体折纸术软体机器人中的应用
LabVIEW的六轴工业机器人运动控制系统
新型超声波墨水分散及细胞接种技术实现生物医学胚胎培养新突破
手握鸡蛋而不碎,日本工程师开发出突破性的新型柔软智能传感器
哈尔滨工业大学研发液态金属磁性微型软体机器人


美国南加州大学研发新型折纸传感器,森霸传感上半年营收增长18.13%

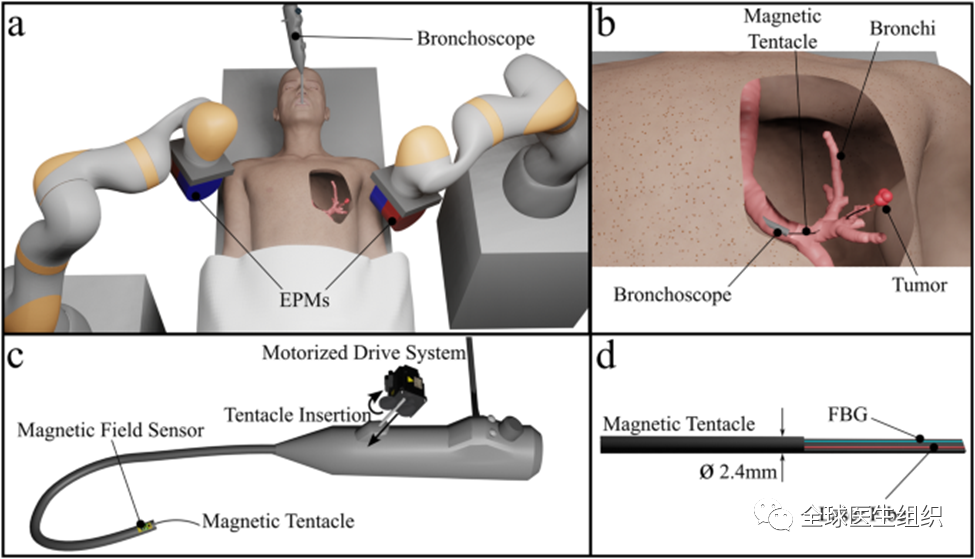
2毫米微型磁控机器人有望改变癌症检测和精准治疗
知名大学开发出可与光芯片无缝集成的光隔离器
研究人员展示FeverPhone软件,利用手机温度传感器测量人体温度






 工商网监
工商网监
评论