 无人机的飞行原理设计详解
无人机的飞行原理设计详解
旋翼和轮子一样,是一项神奇的发明。
四旋翼无人机更是化作了航拍机,满足了许多普通人关于天空的想象。
旋翼之所以能飞,玩过竹蜻蜓的朋友应该都知道:当手的搓动给了竹蜻蜓一个旋转的速度后就会产生升力,让竹蜻蜓起飞。
同理,多旋翼无人机也是由电机的旋转,使螺旋桨产生升力而飞起来的。比如四旋翼无人机,当飞机四个螺旋桨的升力之和等于飞机总重量时,飞机的升力与重力相平衡,飞机就可以悬停在空中了。
小时候看漫画,看到哆啦A梦和大雄头戴竹蜻蜓自由的在空中翱翔,就特别想和他们一样,可以飞翔在空中,俯瞰大地。
但是如果现在真有人发明出一模一样的竹蜻蜓,我肯定是不愿意戴的。因为飞起来的效果是这样的:
螺旋桨疯狂旋转,人也向反方向疯狂旋转。..。..
大雄整个人都转蒙逼了,还怎么能跟静香一起看风景呢?
根据牛顿第三定律,旋翼在旋转的同时,也会同时向电机施加一个反作用力(反扭矩),促使电机向反方向旋转。这也是为什么现在的直升机都会带一个「小尾巴」,在水平方向上施加一个力,去抵消这种反作用力,保持直升机机身的稳定。
而回到四旋翼飞行器上,它的螺旋桨也会产生这样的力,所以为了避免飞机疯狂自旋,四旋翼飞机的四个螺旋桨中,相邻的两个螺旋桨旋转方向是相反的。
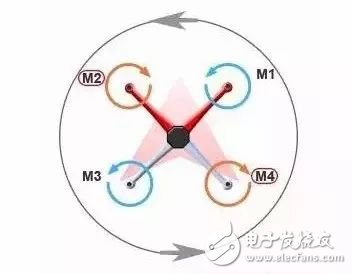
如下图所示,三角形红箭头表示飞机的机头朝向,螺旋桨M1、M3的旋转方向为逆时针,螺旋桨M2、M4的旋转方向为顺时针。
当飞行时,M2、M4所产生的逆时针反作用力(反扭矩)和M1、M3产生的顺时针反作用力(反扭矩)相抵消,飞机机身就可以保持稳定,不会像大雄那样「疯狂」自转了。

仅如此,多轴飞机的前后左右或是旋转飞行的也都是靠多个螺旋桨的转速控制来实现的:
垂直升降
这个很好理解,当飞机需要升高高度时,四个螺旋桨同时加速旋转,升力加大,飞机就会上升。当飞机需要降低高度时同理,四个螺旋桨会同时降低转速,飞机也就下降了。
之所以强调同时,是因为保持多个旋翼转速的相对稳定,对保持飞行器机身姿态来说非常重要,看了之后的讲究你就会明白了~
原地旋转
上面已经说了,当无人机各个电机转速相同,飞机的反扭矩被抵消,不会发生转动。
但是当要飞机原地旋转时,我们就可以利用这种反扭矩,M2、M4两个顺时针旋转的电机转速增加,M1、M3号两个逆时针旋转的电机转速降低,由于反扭矩影响,飞机就会产生逆时针方向的旋转。
水平移动
多轴飞机与我们平时乘坐的客机不同,没有类似客机那样垂直于地面的螺旋桨,所以无法直接产生水平方向上的力来进行水平方向上移动。
当然这难不倒我们,还拿上图的四旋翼来说,当需要按照三角箭头方向前进时,M3、M4电机螺旋桨会提高转速,同时M1、M2电机螺旋桨降低转速,由于飞机后部的升力大于飞机前部,飞机的姿态会向前倾斜。
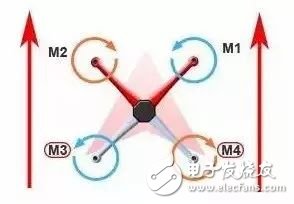
倾斜时的侧面平视如下图,这时螺旋桨产生的升力除了在竖直方向上抵消飞机重力外,还在水平方向上有一个分力,这个分力就让飞机有了水平方向上的加速度,飞机也因而能向前飞行。

相反的:当M1、M2电机加速、M3、M4电机减速时,飞机就会向后倾斜,从而向后飞行。
同理可得:当M1、M4电机加速,M2、M3电机减速时,飞机向左倾斜,从而向左飞行;
当M2、M3电机加速,M1、M4电机减速时,飞机向右倾斜,从而向右飞行。
这样一解释,是不是觉得多旋翼的飞行原理很简单?~
其实在多旋翼之前,人们是用更复杂的固定翼飞机和直升机来进行航拍的。
但固定翼飞机的起飞降落对场地要求非常高,也不能悬停,没法垂直上升下降,局限性太大。
而直升机虽载重大、速度快,但是它结构非常复杂而精密,上千个零件无论是从调试还是保养方面都非常的麻烦。
相比而言,多旋翼的飞行原理简单,机身结构也就更加简单可靠,消费者可以很快的上手飞行而不需要过多的调试和保养,因此多旋翼很快占领了航拍市场。
-
无人机
+关注
关注
224文章
9856浏览量
174705
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论