 阿里首次出现在自动驾驶计算机视觉算法集KITTI道路场景分割排行榜上
阿里首次出现在自动驾驶计算机视觉算法集KITTI道路场景分割排行榜上
近日,阿里巴巴首次出现在自动驾驶计算机视觉算法集KITTI道路场景分割排行榜上。
榜单显示,阿里人工智能团队iDST获得三项分割任务第一,包括UU_ROAD(乡村车道)与UMM_ROAD(多车道)两项特定场景任务,及整体场景的综合评测任务URBAN_ROAD(城市车道)。
据悉,KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,是国际公认的最大自动驾驶计算机算法评测数据集。KITTI数据集涵盖城市、住宅区、道路、校园、行人等五大场景,采用更适合自动驾驶的BEV(Bird’sEye View,鸟瞰)视角评价方式,包含众多难度较大的无标识线道路。
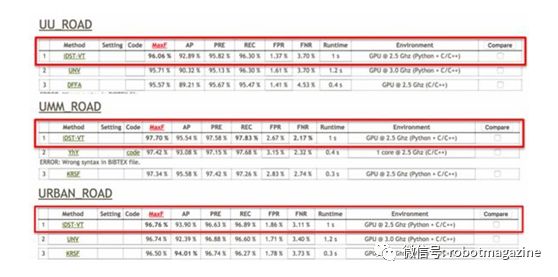
阿里获三项分割任务第一
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
人工智能
+关注
关注
1776文章
43782浏览量
230562 -
计算机视觉
+关注
关注
8文章
1595浏览量
45602 -
自动驾驶
+关注
关注
773文章
13018浏览量
163183 -
阿里
+关注
关注
6文章
428浏览量
32694
原文标题:阿里视觉算法获三项分割任务第一
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
未来已来,多传感器融合感知是自动驾驶破局的关键
/L4级自动驾驶赛跑的元年。
马斯克评论FSD 12.3版本的左转弯操作就像人类司机一样。如果FSD 12.3版本成功,将基本颠覆目前市场上的智能驾驶技术路线。基于“数据/算法/算力”的无人驾
发表于 04-11 10:26
【量子计算机重构未来 | 阅读体验】+ 初识量子计算机
分介绍了量子计算机的工作原理、计算能力、研发现状等专业知识点;第二部分介绍了量子计算机的应用场景,比如工厂、物流、智慧交通、自动驾驶等等;正
发表于 03-05 17:37
LabVIEW开发自动驾驶的双目测距系统
LabVIEW开发自动驾驶的双目测距系统
随着车辆驾驶技术的不断发展,自动驾驶技术正日益成为现实。从L2级别的辅助驾驶技术到L3级别的受条件约束的自
发表于 12-19 18:02


【KV260视觉入门套件试用体验】八、VITis AI自动驾驶多任务执行MultiTask V3
是一种模型,旨在同时执行自动驾驶场景中的不同任务,同时实现优异的性能和效率。这些任务包括对象检测、分割、车道检测、可行驶区域分割和深度估算,这些都是
发表于 09-26 16:43
【RISC-V + OpenCV 计算机视觉】用 VisionFive 2 昉·星光 2 进行物体识别
广泛应用于视频监控、自动驾驶等领域。
基于Debain操作系统和OpenCV框架,赛昉科技在VisionFive 2(昉·星光 2)RISC-V单板计算机上实现了采用GPU加速的目标检测应用程序。作为一种
发表于 09-08 11:42
机器视觉和计算机视觉的区别
视觉是一种技术,它使用相机和基于图像的检测算法来识别并理解已知或未知的图像。它是实现智能自动化的一种方法,包括识别机器人、自动驾驶汽车、人脸识别和图像分类等。机器
自动驾驶中的点云标注:技术与应用
、车道线标注、道路标志牌标注等。这些标注数据可以帮助自动驾驶汽车识别路面情况、环境信息以及交通标志,从而实现自主驾驶。 点云标注技术的发展离不开计算机
图森未来成功完成中国首次自动驾驶重卡在公开道路的全无人化测试
2023年6月16日 - 全球自动驾驶科技公司图森未来(Nasdaq:TSP)成功完成中国首次自动驾驶重卡在公开道路的全无人化测试,全程无安全员值守和任何人为干预。此次全无人化测试
自动驾驶场景图像分割(Unet)
本文使用matlab环境,测试了自动驾驶场景的图像分割任务。分割网络使用Unet。 一千张标注图像,最终训练精度达到 90%。 数据准备 场景
发表于 06-07 11:58
•0次下载

自动驾驶算法软件架构介绍
自动驾驶技术是一个庞大的工程体系,软件架构、功能算法、控制规划、感知识别、建图定位、电气架构、车载控制器、验证
体系等等,有太多的角度可以去切入。对于自动驾驶功能与算法开发,
发表于 06-01 14:41
•1次下载
深度解析计算机视觉的图像分割技术
人类对计算机视觉感兴趣的最重要的问题是图像分类 (Image Classification)、目标检测 (Object Detection) 和图像分割 (Image Segmentation),同时它们的难度也是依次递增。
发表于 05-30 10:07
•1338次阅读
基于自动驾驶车辆新型的视觉语义定位算法
摘要 高度精确且鲁棒的定位能力对于城市场景中自动驾驶车辆(AVs)至关重要。传统的基于视觉的方法由于光照、天气、视角和外观变化而导致定位丢失。在本文中,我们提出一种新型的视觉语义定






 工商网监
工商网监
评论