 美国特种水下机器人REMUS技术详解
美国特种水下机器人REMUS技术详解
美国海军专业排雷中队自2002年开始装备Mk 18 Mod.0型水雷侦察系统(绰号Skulpi)。其主要组成部分是3台便携式无人自主潜水器(图1)。后者是“水螅虫”(Hydroid)公司 (康斯堡海事公司的美国分部)以Remus-100为原型研制的。Remus-100的主要任务是报告水下情况、水雷侦察和浅海水下巡视。
图1 REMUS便携式自主无人潜水器系统的技术设备
REMUS系统潜水器性能如下:重30.8公斤,长1.3米,直径0.191米,工作潜深150米,自持力22小时,水下最大航速4节,距海底最小工作距离1.5米(取决于多普勒计程仪的能力)。基本型装备:具有合成孔径天线(海洋声学技术公司研制)的侧视水声雷达(雷达具有很高的分辨力,距离50米时为5×5厘米),多普勒计程仪,GPS导航信号接收机;温度和水导电率传感器。
除了制定行动计划和输入数据,操纵员的自动化工作席位(配备便携个人电脑)还能在彩色编码显示器上显示物体的信息、形状和水声影像尺寸,其水声阴影轮廓,传输相对于环境背景的水声对比效果,从而大大简化分类,在总体上加快信息处理进程。
REMUS系统满足MIL-STD-810E军用标准,而REMUS的构造被美国海军领导层视为研制新一代小型军用自主无人潜水器的基本构造之一。该系统于2001年列装,目前是海军陆战队战斗蛙人侦察中队、SEAL特种战斗蛙人分队和海军扫雷部队潜水中队的全套技术装备的组成部分。
2003年3月美国海军第1特种排雷中队在伊拉克乌姆卡斯尔港开展入港航道和港湾清理工作的过程中使用了Mk 18 Mod.0“锯鲉”系统。在一个月的时间里一共成功地发现了237个水下目标,其中100个被认定为水雷。REMUS可由海豚携带,并使用MK 7 MMS型全套设备中的设备(图2)。
图2 由海豚携带的MK7 MMS系统
美国海军将自主无人潜水器与在编的海洋动物群联结合使用同,每个单位包括2对经训练能在100米以内深度搜索沉底水雷和完全埋入泥土(埋深0.5米)的水雷。海豚还被用于验证无人潜水器对海底的调查结果。
图3 Remus-600自主无人潜水器
目前已经研制了Remus-100的改进型Remus-600(图3)。其特点是,由3个艏舵和3个艉舵组成的操纵系统能够确保潜水器具有高度的机动性,在较大的航速范围内有很好的稳定性。Remus-600直径0.32米,长3.24米。其搜索设备是小合成孔径声纳。
小合成孔径声纳系统重量达87公斤,消耗功率150瓦。同时,Remus-600有蓄能超过5.4千瓦时(单组)的蓄电池。利用有效载荷腾出来的地方(即除去小合成孔径声纳),还可以再布置2个蓄电池组,使储备能量达到16.2 千瓦时,可使航程增加到280海里,自持力达到数昼夜。
根据Mk 18 Mod.0“锯鲉”的实战使用经验,美国人做出了对其进行改进的决定。重43公斤的新改型Mk 18 Mod.1“剑鱼”,用于收集水声和测深信息,以及查明敌人近岸地带深3-12米的抗登陆工程障碍系统。从2008年起列装了9套该系统。得益于很高的战术技术性能,不仅美国海军使用该系统,英国、德国、意大利、荷兰、比利时、挪威、瑞典、芬兰、爱沙尼亚、新加坡、澳大利亚和新西兰海军也广泛使用上述型号的便携式自主无人潜水器。
美国特种排雷中队从2010年起装备Silayan系统,该系统包括3台“金枪鱼-9”潜水器,后者重50公斤,长1.65米,直径240毫米,航速2~5节,工作时间12小时,使用深度达200米。它们装备了同样的上述侧视声纳和摄像机。
与此同时,L-3通信海洋系统公司研制了Mk 8 EMD试验型便携式扫雷潜水器。该潜水器重28公斤,长1.05米,直径200毫米,最大航速12节,航速8节时持续工作时间15分钟,航速4节时持续工作时间2小时,工作深度2~300米。装备2台电视摄像机和1台作用距离达50米的声纳。
来自声纳的信息和目标影像沿光缆传输至舰上控制系统的显示器,以进一步分析和识别水雷。潜水器的战雷头(重16公斤)可装聚能炸药或爆破炸药。
在“外国武器装备比较试验”计划框架内,美国专家测试了冰岛Hafmynd公司研制的“潜鸟”(Gavia)自主无人潜水器(重44公斤,长1.7米,直径200毫米,航速达6节,持续工作时间达30小时)。鉴于良好的试验结果,2010年特立达因科技公司获得了生产权。
“潜鸟”自主无人潜水器的构造特点是采用模块化配置。设备系统包括4个制式密封模块:装有摄像机的艏部模块,控制、通信和导航模块,蓄电池模块,推进模块(图4)。

图4 “潜鸟”无人自主潜水器
计划使用适用于潜水器极限潜深的可更换有效载荷模块,后者通过可拆卸的对接装置与潜水器连接。据美国专家评估,该潜水器的性能优于当前其他同类型号。例如,同类型号的潜深为100~200米,而用铝合金或高合金钢制成的“潜鸟”无人潜水器的4种改型分别达200、500、1000、2000米(在海水温度为-2~+35°С的情况下)。
潜水器可装备搜索和探测水下目标的前视声纳,对发现的海底目标进行分类的多射束扫描侧视声纳。可更换有效载荷包括水深测量设备(例如轮廓测定仪)和水文数据收集设备,以及高分辨率数字摄像机。
2008年,潜深达1000米的“潜鸟”无人潜水器交付澳大利亚海军。2009年,葡萄牙海军购买了2台探雷型“潜鸟”无人潜水器。潜深为200米的型号则在美国海军第1特种排雷中队试用。根据总额1000万美元的合同,美国海军将购买10台具有不同配置的“潜鸟”无人潜水器。
在以324毫米小型自主无人潜水器为基础的探雷系统中,诺斯罗普-格鲁曼公司的Mk18Mod.2“无鳔石首鱼”是最先进的型号。其海试已从2012年7月开始进行。该系统包括3台潜水器(工作深度为5~300米,搜索速度为4.5节时可持续工作10小时,由水螅虫-康斯堡公司以Remus-600潜水器为原型研制)。
其动力装置包括锂离子蓄电池(5200瓦)和电动机(双叶螺旋桨)。舵面方向为0°~120°~240°,从而减小了旋转半径,大大降低了潜水器受损的可能性。
基本配置包括具有天线动态聚焦设备的侧视声纳、摄像机(有辅助照明设备)、海水温度和导电性传感器。为了有效搜索完全埋入底土的水雷,可装备带合成孔径天线的侧视声纳。同时,为了使因携带可更换模块而使长度增加1米、重量增加44.5公斤的潜水器保持机动性,加装了装有舵面的的艏舱。原计划2013年底进行制品各组件的最后配合演练并完成试验计划。据研制方估计,量产型的价格应为10万美元左右。
目前通用动力公司正在研制未来的“小刀鱼”探雷系统。该系统将是“自由”级和“独立”级轻型护卫舰全套反水雷装备的一个组成部分。计划在在研的模块(采用20英尺标准20集装箱的尺寸)中布置2台自主无人潜水器、收放装置和第二套蓄电池,以及操纵员自动化工作席位。
系统的主要组成部分--无人潜水器(长6.1米,直径533毫米,重1360公斤,工作深度12~300米)以正在试用的“金枪鱼-21”潜水器为原型。为了降低物理场信号特征,减小尺寸和重量,除铝合金外,潜水器构造还将采用多层复合材料和强化玻璃钢。“金枪鱼-21”潜水器由金枪鱼机器人技术公司研制,重750公斤,直径533毫米,长约5米,搜索速度3~4节,最大时速8.3公里,持续工作时间达25小时,搜索效率为0.12平方海里/小时,搜索宽度150米,潜深4500米,总动力耗量13.5千瓦时(9组锂聚合物蓄电池,功率各为1.5千瓦时)
动力装置包括2组模块化锂离子蓄电池和1台电动机,驱动一副用复合材料制成的三叶片螺旋桨(布置在环形套筒中),后者是采用铰链的推进装置-舵联合系统。采用这种固定方式能够确保潜水器具有较高的机动性,特别是在以低速和超低速航行时。据研制方测算,该型潜水器在以6节速度航行时自持力不少于16小时。
潜水器上主要的搜索设备是具有合成孔径天线的高分辨率低频侧视声纳,它是由Ultra Electronics公司与宾夕法尼亚国家大学应用研究试验室联合研制的。来自声纳的数据将被记录在存储容量为12TB的可拆卸硬盘中。除制定行动计划和输入数据外,潜水器上的软件和硬件设备还能自动处理和分析(通过与所有水雷(或类似目标)数据模型库中的数据进行比对)接收到的信息。
美国计划2019年开始批量生产和向海军交付24套“小刀鱼”系统和6套训练设备。
为了对海底进行高精度的制图研究,根据美国海军海洋地理局的订货,“水螅虫”公司研制了Remus-6000深潜器(重900公斤,长4.1米,壳体直径600毫米,搜索速度4节,自持力12小时),得益于钛合金壳体,它能够下潜至6000米的极限深度。
这种深潜器的可更换有效载荷包括侧视声纳(工作频率300/900千赫)、水底轮廓测定仪(工作频率30/200千赫)、摄像机(带辅助照明设备)。目前有2艘这种深潜器在美国海军中服役。
在极浅水域搜索和排除水雷的任务十分困难。主要问题是,需要在碎波持续的情况下对深度小于2~5米的近岸水域进行水声测位照相,这种水域的典型特点是有猛烈的拍岸浪。而大大的拍岸浪无法到达、水深小于1米、相对平静的近岸浅水区,茂密的水下植物给搜索抗登陆水雷带来了很大困难。
为了解决上述任务,美国启动了一个小型(便携式)自主无人潜水器系统研发计划。这种系统用专门用于在浅水区和拍岸浪区(水深小于12米)搜索和排除(压制、标示、摧毁)沉底水雷和抗登陆锚雷。
目前,列入这个计划的候选基本设计包括:
①“蟹形爬行”无人潜水器,波士顿iRobot公司于1990年代末研制。这种潜水器(图5)被称作“有腿自主潜水器”(Autonomous Legged Underwater Vehicle)。其中最著名的是Arie1-II,其搜雷能力曾在各种条件下进行了演示,包括在瑞威尔海滩(马萨诸塞州)附近,在沿岸系统站(Coastal Systems Station)靶场(佛罗里达州)和蒙特雷湾。试验证明它在海滨坡地具有良好的稳定性和对钢铁目标定位的能力,但是据研制公司披露,“在保障动态控制方面还需要做大量的工作”。尽管在近岸水域行动的无人潜水器的构想相当简单,但发现了需要进行补充研究的一系列综合问题。其中包括,在意外故障之后确保精确导航和恢复无人潜水器的航行速度;在拍岸浪区猛烈的湍流中越过障碍。
②“游骑兵”自主无人潜水器,由Nekton Research LLC公司研制。长920毫米,直径90毫米,基本型重约4.5公斤,最大自持力4小时(潜航速度2-4节)。
③“海爪”自主无人潜水器,由福斯特-米勒公司研制。是在“爪”式陆地机器人的基础上研制的能在深度小于30.5米的区域移动的爬行潜水器。
图5 蟹形反水雷无人潜水器
前面已经提到,Remus600无人潜水器成功地在“北达可他”号潜艇上进行了水下释放和回收试验。总地来说,美国专家在实践中首次实现了在水下从潜艇上使用可复用无人潜水器的构想。例如:
▲AN/BLQ-11系统的水下搜雷潜水器(作战半径120海里,搜索时间40小时(速度6节),使用深度12~475米)从潜艇鱼雷发射管放出。用同侧的2具鱼雷发射管回收。上边的鱼雷发射管布置有长18米的可伸缩机械手,用于抓取潜水器,并将其送入下面的鱼雷发射管。这种方法的不足是需要使用4具鱼雷发射管中的2具,使弹药架上的弹药从26件减至16-18件。考虑到这些,以及系统价格较高(大约180万美元),只试用了1套设备(原打算一共购买12~16套系统)。
▲代号为“蝠鲼”的长期计划(始于1996年)中的作战潜水器。计划用潜水器将在近岸区域独立进行海上侦察,搜索、探测和用鱼雷(包括未来的超空泡鱼雷)摧毁敌方水下目标。用多用途核潜艇作为其运载工具。计划在艇艏布置4台壳体外形似鳐、不会影响潜艇的流体动力学性能和水声特征的潜水器。
自2011年起积极推进大型无人作战潜水器的研发工作。到2013年3月之前应确定对无人作战潜水器的战役战术和战术技术要求、必要的技术研究清单、生命周期成本。美国海军初步提出了对这种潜水器的一般要求。根据其构想,LDUVV长6米,直径1.6~1.8米,在小于250米工作深度时航速小于6节 ,可在不少于70昼夜的时间内(包括展开和返回驻地时间)在远方海(洋)区执行作战和特种任务。其所携带的主要装备是4枚324毫米鱼雷和外置的水声传感器(多达16个)。潜水器可从岸上站点上使用,也可从水面舰船、多用途核潜艇(发射井)以及“俄亥俄”级巡航导弹核潜艇上使用。对LDUVV尺寸和重量的要求在很多方面取决于这些潜艇的发射井的尺寸(直径2.2米,高7米)。
计划2015开始进行以“海神”潜水器为原型的LDUUV原型的演示试验。“海神”潜水器由金枪鱼机器人公司和哥伦比亚集团公司联合研制,重3.7吨,有效载荷1.6吨,航速6节时持续工作时间为92小时,以5~9节的平均速度移动时续航力达600公里,最大航速10节(18公里/小时)。是否继续研制新系统,将于2017年做出最终决定,计划2020年开始试生产10台。
“海神”潜水器(图6)能承担大量功能:从预定水域巡逻到隐蔽跟踪弹道导弹核潜艇。潜水器里配置了货舱,可搭载180公斤载荷,包括各种传感器、通信设备、爆炸装置(物)等。还可以携带MK67水下机动水雷或MK54鱼雷,因而在必要时能对所跟踪的目标实施打击。

图6 “海神”(Proteus)无人潜水器
在实施美国海军的Holdat risk构想时可有效使用这种反潜潜水器。该构想是指,在获悉敌潜艇出航时间的情况下,做好在已知港湾附近探测敌潜艇的准备。同时,根据敌方在己方港湾附近的制空能力,在敌潜艇驶出港湾后的下潜点附近选择无人潜水器的投送点。在潜艇未驶离码头时,提前将潜水器投送至预定区域待机。根据港口的水文地理资料,可根据已知或预测的潜艇航行路线分散配置潜水器。
总地来说,该计划的特点是技术和财务风险较高。据初步估计,量产型的价格可能不低于7500万美元,20年使用成本约为7亿美元。
另一方面,正在积极研制可对抗上述反潜和反水雷无人潜水器的无人驾驶系统。可根据所担负的任务将后者分为以下几类:欺骗型、歼击型、捕获型、综合型;集上述两种或三种功能于一体。或者根据所防护的目标类型分为:用于保护潜艇、雷场的,用于保护水区、港区、导弹载艇驻区、水下靶场的,用于守卫边界的,用于保护海上固定设施(石油平台等)的,用于保护水面舰船的。
反无人潜水器欺骗系统负责对抗敌方无人潜水器的引导系统和传感器,暗中调换其目标,其最终目的果是“迷惑”敌无人潜水器,将其从任务目标引开,或者创造条件使其不能发现或识别目标。这种类型的无人潜水器目前最常见的是水声对抗装备、漂移型自卫型无人潜水器和其他类似装置。通常,这种设备被视为反鱼雷装备,亦即使来袭鱼雷偏离潜艇,或制造干扰影响鱼雷自导系统的工作。
这种水声对抗装备的典型例子是“水利仪器”中央科学研究所MG-74E自行水声对抗装置(图7),其功能是对抗潜艇、水面舰艇的水声系统,反潜兵力的水声监视装备和鱼雷的自导系统。
图7 MG-74E水声压制装置
这些系统的共同缺点是潜艇上的水声对抗装置数量有限,而且在水声对抗装置存放在潜艇鱼雷舱里和用制式鱼雷发射管发射的情况下,它们占用潜艇本可装备的武器的位置,因此削弱了潜艇的作战效能。
还必须指出,在用大型反潜潜水器(例如“蝠鲼”项目)探测和攻击潜艇时,具有一定效能的水声压制装备只能帮助把潜水器直接发射的武器引开,但不能把威胁更大的潜水器本身引开,因为后者拥有更大的能量储备,能使它跟踪并再次对目标发起攻击。
因此只装备了用于反无人潜水器欺骗系统的潜艇应尽可能多地携带这种系统,以便能至少破坏无人潜水器的几次攻击。目前,一些国家正在积极研制的舷外装备模块(甚至在小型潜艇上也可以布置)是部署足够数量的反无人潜水器欺骗系统这一问题的解决办法。
反无人潜水器歼击系统既能完全地、也能部分地对敌无人潜水器进行物理摧毁,包括破坏其传感系统(例如利用爆炸)、关键组成部分——壳体、控制系统,包括通信线路、发动机和推进系统等。其工作的最终结果是对无人潜水器进行破坏,阻止其执行任务。
目前一些国家正在积极研制作为“反鱼雷鱼雷”使用的反无人潜水器歼击系统,也就是能够瞄准并利用战斗部不接触爆炸来消灭小型快速机动目标的专业潜水器。这种反无人潜水器系统不仅可用于对付来袭武器,还可对付武器的运载工具——无人潜水器。宾夕法尼亚州国立大学应用研究试验室研制的反鱼雷鱼雷就是一个例子(图8)。

图8 宾夕法尼亚州国立大学研制的反鱼雷鱼雷
反无人潜水器捕获系统能捕获敌潜水器。网、特种诱饵等都属于这种系统。通常,这种反无人潜水器系统用于装备潜水器,但是不排除也为水面无人艇研制捕获系统的可能性。
这种系统对无人潜水器的作用包括:使潜水器丧失活动能力,压制其用于传输信号的通信信道(对于没有水下通信信道的潜水器来说,不许其浮到水面就足够了)。
综合型反无人潜水器系统可担负多种系统的功能。可根据具体任务确定其组成。例如大深度锚泊装置。其主动部分上升到水面,制造“假目标”(同时通过敌我识别系统防止捕获己方无人潜水器),引诱敌潜水器靠近自己,使其不能活动,并捕获之,然后利用锚上的绞盘,将敌人潜水器拖至其不能承受的深度,使其报废。
除了上述无人潜水器。值得一提的还有近年来快速发展的滑翔型和漂移型自主潜水器。许多专家认为,用它们在预定行动区域隐蔽收集水文资料更加有效,因为其自持力较高(长达数月),水声特征弱。
这种无人潜水器装备测量和信息系统,能沿1或2个指挥和通信信道定期传输收集到的测量数据和部分加工过的测量数据。
滑翔型潜水器在水中通过调整剩余浮力上下和前后移动(倾斜轨迹)。为此,取代配备螺旋桨的动力装置,为其装备了浮力自动控制系统。该系统以调整剩余浮力值和标记的方式形成控制动作。
浮力自动控制系统的执行系统包括平衡水柜(布置在固壳中)、弹性容器(布置在水循环舱中)、配电电磁阀、工作液液压泵(通常是矿物油)、艉稳定器。在质量排水量不变的情况下,可通过从平衡水柜中排出工作液或相反——向平衡水柜调节潜水器的容积排水量,从而调节浮力。因为浮力自动控制系统的执行系统是潜水器电能的主要用户,滑翔型潜水器的自持力在很大程度上既取决于浮力自动控制系统的工作算法,也取决于执行系统的类型。
图9 “斯洛克姆”G2水下滑翔机
美国特立达因公司研制了“斯洛克姆”滑翔型潜水器(图9)。该潜水器重52公斤,长1.5米,直径213毫米,2组碱性蓄电池,装备2种动力装置(电动力装置和热动力装置)。下水时,潜水器沿平缓倾斜轨迹以0.8节的平均速度下潜至200米以内深度,然后沿上升轨迹上浮,周而复始。该潜水器自持力20~30天(取决于所搭载的设备),在沿1500公里的航线航行时能向岸上信息收集与处理中心传回资料。可更换有效载荷包括各深度层海水温度、盐度、密集、导电率测量传感器,声测设备,水听器,表层流和深层流参数测量传感器。潜水器由其搭载的处理器程序控制。每2~3小时上浮至半潜状态,用“铱”星系统设备与岸上信息收集与处理中心交换数据,并根据“导航星”空间导航系统(GPS)的数据校正位置。空间导航系统接收机的天线装置和无线电通信设备安装在垂直稳定鳍上。
在“斯洛科姆”中使用“热机”(利用不同深度层的温差工作)的情况下,自持力超过300昼夜,工作深度达1500米,因为在深度范围扩大的情况下,温度升降率也随之增加,这提高了动力装置的效能。
例如,以“斯洛科姆”为原型研制的“红色骑士”于2009年用221昼夜从西向东横越大西洋,航程11745公里,创造了自持力和航程纪录。同时完成了11000次下潜和上浮,与岸上信息收集处理和定位中心进行了约1000次数据交换。
特立达因公司的“斯洛科姆”被美国海军领导层选为“濒海战场传感——滑翔机”计划框架内海洋地理潜水器采购计划的基本方案之一。
近年来,国外自主无人潜水器市场的发展速度趋缓。2012年中期以前建成的自主无人潜水器总数估计为1100~1200艘,其中70%是2002~2008年建造的。近85%在用的自主无人潜水器极限工作潜深小于600米。小型无人潜水器(重50~70公斤,价格为6~30万美元)占比最大(65%,不包括水下滑翔机)。
军队对研制和使用具有超长自主续航时间(从数周到1年)的无人潜水器的兴趣在增加。这种潜水器在执行与大范围测量水层和海底附近环境参数相关的海洋地理研究任务中表现良好。鉴于其构造特点,它们被单独归为一类无人潜水器——水下滑翔机。目前国外已经研制了8~10个水下滑翔机型号,其中值得一提的是:“海洋滑翔机”、“斯克洛姆-E”、“斯克洛姆-T”、“喷射滑翔机”、“X射线滑翔机”(图10)、“ANT浅水滑翔机(美国),“斯特恩”(法国)、“佛拉加”(意大利)。目前世界上已经建成超过550艘水下滑翔机。预计到2020~2025年之前,它将成为执行各种军事任务需求最大的无人潜水器
截至2012年12月,美军有500艘无人潜水器,其中67%属于自主无人潜水器。到2017年之前美国海军的潜水器将超过700艘,不包括用于灭雷、施放水声干扰、模拟水下目标等的潜水器。
在水下环境不明和缺乏高精度导航设备的情况下,同时导航和绘制地图的的构想是比较现实的。同时,与按声纳影像探测和识别重要目标相关的问题以及建立潜水器载地理信息系统(用于储存、处理和提取海量的外部环境数据)的问题尤为重要。
现代化的自主无人潜水器一次下潜能自主完成一系列任务,这要求研制以有效的和富于表达力的逻辑为基础的高水平的自主无人潜水器任务说明与给定设备,开发相应的自主无人潜水器控制系统架构及其行为形成方法;可以通过使用自主无人潜水器编队提高水下工作效能。同时,会出现制定多目标编队任务计划,在环境信息不全面、不准确和有无源及有源障碍的情况下指挥自主无人潜水器编队航行的任务。
图10 “X射线滑翔机”无人潜水器
-
机器人
+关注
关注
206文章
26974浏览量
201297 -
潜水器
+关注
关注
1文章
17浏览量
7601
原文标题:美军部分军用和特种水下机器人的技术系统
文章出处:【微信号:jingzhenglizixun,微信公众号:机器人博览】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
特种机器人的定义与分类

LabVIEW的六轴工业机器人运动控制系统
高动态人形机器人“夸父”通过OpenHarmony 3.2 Release版本兼容性测评
什么是特种机器人?特种机器人的可移动性结构解析

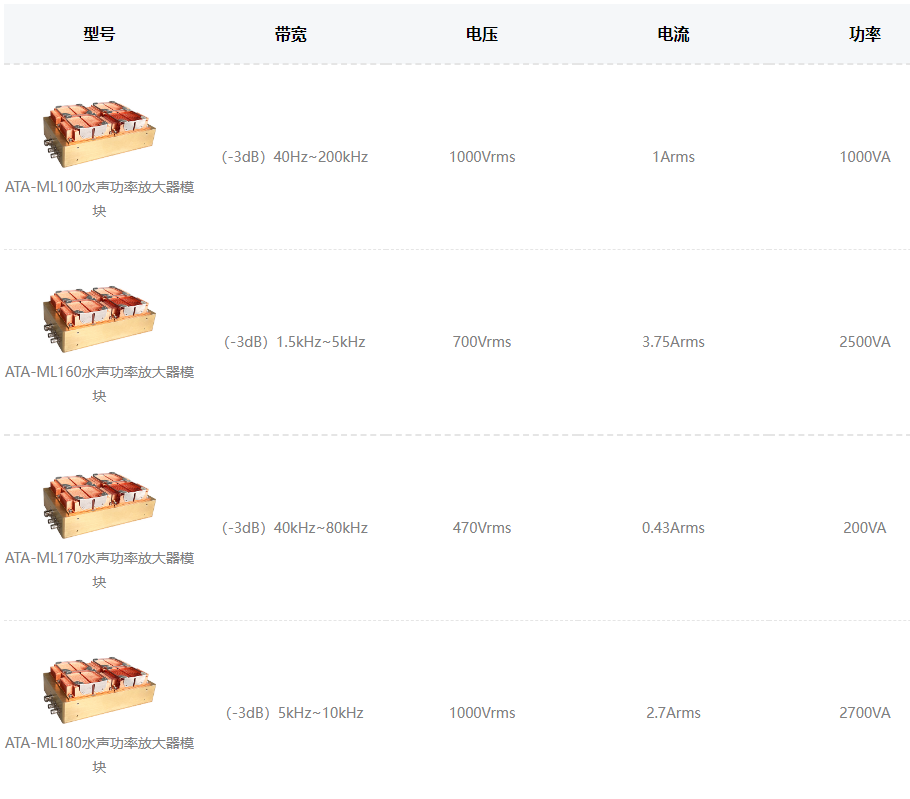
功率放大器模块在水下机器人中的应用有哪些
基于Matlab和VR技术的移动机器人建模及仿真
鳍源水下机器人为5G+海洋牧场带来科技助力!
水下机器人的设计与实现
用于水下机器人的抗疲劳导电聚合物水凝胶应变传感器

电应普水下测距传感器赋予泳池清洁机器人智能感知

某水下机器人供电系统干扰改善方案浅析





 工商网监
工商网监
评论