 可穿戴型下肢助力机器人感知系统传感电路设计
可穿戴型下肢助力机器人感知系统传感电路设计
电路说明: 电路由检测电路、信号放大电路和稳压电源电路组成。其中检测电路由电阻RH、晶体管VT以及电阻R1、R2组成;信号放大电路由A1、RP1、RP2、 R3、R4、R6、R5、R8、VD3组成;稳压电源电路由VD1、VD2、R7、R9、R10、R11组成,为检测电路提供2.5V的稳压电源。而电阻 RH可以采用硅电阻,因为硅在25摄氏度时响应时间小于5S。 其中电路中采用了两个TL431,TL431是一个有良好的热稳定性能的三端可调分流基准源。它的输出电压用两个电阻就可以任意地设置到从2.5V到 36V范围内的任何值。该器件的典型动态阻抗为0.2Ω,在很多应用中可以用它代替齐纳二极管,例如,数字电压表,运放电路、可调压电源,开关电源等等。
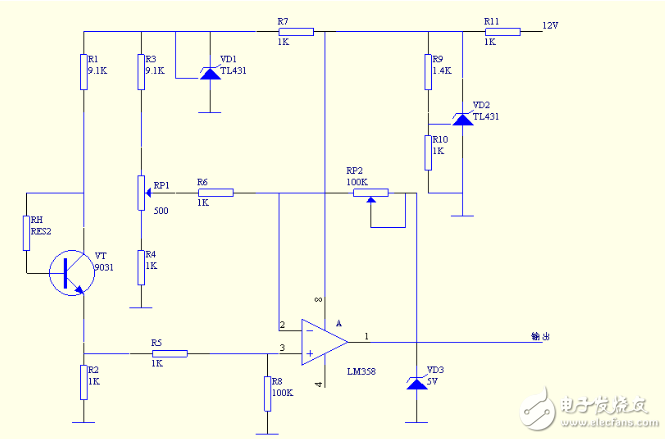
电路原理: 当传感器穿戴身上时,由于温度不同,使得传感器的RH阻值也不同,这个电阻成为VT的基极偏流电阻。偏流电阻的不同,使基级的电流也不同,从而改变了VT 的集电极电流,也就改变了VT发射极电流,发射极的电流流经 R2,在R2上将发射极电流转换成电压,并将该电压送到A1的同相输入端,经A1放大后输出,并由VD3控制输出电压,使得输出电压在5V以内。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
稳压电源
+关注
关注
61文章
1340浏览量
99203 -
传感电路
+关注
关注
1文章
16浏览量
19218 -
可穿戴设备
+关注
关注
55文章
3722浏览量
165869
发布评论请先 登录
相关推荐
基于运动学原理的可穿戴下肢助力机器人
运动提供助力支持。##步行助力机器人与使用者通过束带紧密结合在一起,形成一个高度自动化的人-机一体化系统。 ##实验以原型样机为对象,利用人-机间的交互力
发表于 02-18 17:50
•1.2w次阅读
可穿戴传感电路设计精华
` 随着移动互联网迅速崛起,续智能移动设备之后,可穿戴设备被抬上新的高度,可面对这块大蛋糕,众厂家并没有给出让大众满意的方案及体验,究竟如何设计可穿戴设备才能交上这份满意的答卷呢?如果你是设计师你
发表于 01-04 17:39
机器人视觉——机器人的“眼睛”
目前产业机器人仅能在严格定义的结构化环境中执行预定指令动作,缺乏对环境的感知与应变能力,这极大地限制了机器人的应用。利用机器人的视觉控制,不需要预先对产业
发表于 01-23 15:02
自律型机器人制作入门.基于Arduino
1.2.6 智能机器人1.3 自律型移动机器人1.3.1 感知1.3.2 动作与结构1.3.3 智能1.4 小结第2章 机器人的运动2.1
发表于 06-23 11:18
基于ARM9的DF-1机器人传感器系统设计
器感知外部环境信息和自身状态,获得反馈信息,实现系统的闭环控制。目前在仿人机器人中应用的传感器种类繁多,例如视觉传感器、电子罗盘、加速度计和
发表于 06-21 07:04
采用ARM9实现嵌入式仿人机器人传感器系统设计
0引言传感器技术是仿人机器人研究的关键技术之一。仿人机器人之所以能在已知或未知的环境中完成一定的作业功能,是因为它能够通过传感器感知外部环境
发表于 07-29 06:09
DF-1仿人机器人怎么样?
传感器技术是仿人机器人研究的关键技术之一。仿人机器人之所以能在已知或未知的环境中完成一定的作业功能,是因为它能够通过传感器感知外部环境信息和
发表于 09-18 06:17
LG电子公开可支持人体下肢肌肉力量的可穿戴机器人,助力布局机器人领域
据报道,LG电子正致力于扩大在机器人领域的布局,计划在8月31日首次公开可以支持人体下肢肌肉力量的“LG CLOi SuitBot”可穿戴机器人。
发表于 09-12 09:52
•970次阅读
下肢外骨骼康复训练机器人
迈步下肢外骨骼康复训练机器人BEAR-H1是一款辅助脑卒中患者用于步态康复训练的新型可穿戴式下肢外骨骼机器人。凭借出色的设计和创新的概念,该





 工商网监
工商网监
评论