 GPIO 四种编码模式的对应脚位如何查找
GPIO 四种编码模式的对应脚位如何查找
嵌入式设备有个被天生赋予的重点任务,就是要成为自动控制整体方案中的一员。早期市场对自动控制的需求主要集中在单纯的“机电控制”上,而具备智能计算的 Jetson 系列产品相对与几十元的这类控制板来说,成本高出了一个阶位。
但是随着“智能+控制”的结合功能成为新工业主流需求之后,成本已经不是最首要的关键因素,因为智能设备所带来的价值已经远远超过先前的成本差异。NVIDIA Jetson 设备就是在这样的风潮下逐渐崭露头角,为智能工业带来新的生命力。
透过“扩充引脚”的方式与机电控制设备进行对接,是绝大部分嵌入式设备所采用的方法。NVIDIA 在 2015 年的 Jetson TK1 产品就已经配置了这方面的引脚,经历了 TX1/TX2 到 AGX Xavier 的阶段,依旧保有这方面的接口(如下图),一直到 2019 年 Jetson Nano 推出之后,采用与树莓派兼容的 40 针引脚的设计,在战略上是个非常高明的设计。
过去 10 年是创客(maker)兴盛的年代,而树莓派凭借“硬件开源”的风潮吸引庞大的民间实力,开发了相当齐全的周边产品,下表是比较常用的一部分设备清单,全部都是基于树莓派 40 针引脚定义所设计。
如今 Jetson Nano(含2GB)、Xavier NX 等开发套件的引脚也兼容于树莓派的定义时,就表示上面列表中的周边设备,都能直接适用于现在主流的 Jetson 开发套件,不仅无需依赖中间的转换器,包括代码也可以不需要修改,就能将原本不具备深度学习能力的树莓派方案,立即移植到 NVIDIA 的智能 Jetson 设备上,马上变成“智能控制”的应用设备,实用价值瞬间就提高一个档次。
本文属于 Jetbot 系列中的一环,不过在进入与周边设备(PiOLED、PCA9685 等)对接之前,有必要让初学者对 Jetson 的 40 针引脚的细节与使用有进一步的了解,因为 Jetbot 是一个经典的项目,但更重要是要让初学者可以自行搭建更多的应用。
过去缺乏智能识别能力的创客项目,多属于较为单调的固定执行流程的应用,但是有了 NVIDIA Jetson 的智能识别能力之后,就能让这类项目变得非常多彩多姿,并且更加贴近生活或工作上的实用场景,例如根据垃圾分类识别后进行处理的机械手臂、根据猫脸识别后对特定猫开启喂食器、根据水果成熟度进行采摘等应用,都是实用价值非常高的,这才是真正智能设备的创造动力。
网上有不少探索 Jetson 这 40 根引脚的文章,但内容相对笼统并且有些部分的混淆,对初学者来说会产生障碍。本文的重点就是将以下三个部分讲解清楚:
40 根引脚的 SPIO 与 GPIO
Jetson-IO 工具与 Jetson.GPIO 开发库
四种 GPIO 引脚调用模式:BOARD、BCM、CVM、TEGRA_SOC
只要将这三个关系捋清楚后,整个 40 针引脚的使用就会瞬间变得非常简单。假如上述三个关系您都很熟悉了,就可以跳过本文的内容;如果还没搞清楚的,请仔细阅读本文,能让您很有条理地掌握这些引脚的使用要领。
40针引脚的SPIO与GPIO
下图是 Jetson 的 40 帧引脚图的说明,适用于 Nano(含2GB)、Xavier NX 与 AGX Xavier 等开发套件。虽然上面满满的内容,乍看之下的确令人眼花缭乱,只要看完我们所作的分解之后,就会让这部分的内容变得非常简单。
首先,虽然大家平常时候习惯将这些引脚统称为 GPIO,但事实上这 40 根引脚主要分成 GPIO(General Purpose I/O)通用功能与 SFIO(Special Function I/O)特定功能两大类,后者总共有 18 根与开发套件底板电子电力直连的脚位,这是不能重新定义的固定功能,主要分为以下三种:
1. 供电相关:这个部分需要非常细心处理,如果错用可能会造成 Jetson 设备损坏。这里也进一步分成三种功能:
(1) 5V 直流电输入/输出:脚位[2, 4],在标识上唯一使用“红色”的地方,可以对 Jetson 开发套件作为“供电”用途,有些 Jetbot 第三方套件就是用这种方式对 Nano(含2GB)进行供电,不过这些都是专业厂商自行设计的电路,如果不太熟悉供电原理的读者,请勿随意尝试以避免对设备造成破坏。
这两个接脚也能对 5.0V 规格的周边设备进行供电,但是非常不推荐这样使用,因为 Jetson 本身的电力已经处于吃紧状态,如果再对其他设备提供 5V 输出,很可能影响整体稳定性。
(2) 3.3V 直流电输出:脚位[1, 17],可以为一些低电设备进行供电。例如在 Jetbot 项目中使用的 PiOLED 与 PCA9685,就是由 Nano(含2GB)的 3.3V 供电口对这两个元件进行供电。
(3) GND 接地点:脚位[6, 9, 14, 20, 25, 30, 34, 39]共 8 个。
2. 二组 I2C:I2C1_SDA/SCL=》脚位[27, 28];I2C2_SDA/SCL =》 脚位[3, 5]
3. 一组 UART:UART2_TX/RX=》脚位[8, 10]
这样一整理之后,是不是就变得很简单了?撇开电源相关的 12 根脚位之外,真正需要了解的,就是两组 I2C 与一组 UART 共 6 个脚位,这 18 根脚位的定义与树莓派是完全一致的。在 Jetbot 项目中也就使用 1 组 3.3V/GND 电源与 1 组 I2C 的 SDA/SCL 而已,总共 4 根引脚就能完成智能车的任务。
如果原本树莓派创客项目中只使用这类的 I2C 或 UART 引脚的话,几乎不需修改代码就能将原本的应用移植到 Jetson Nano(含2GB)设备上,立刻升级为智能识别的应用,所展现的价值就马上提高一个台阶。
至于另外 22 根“可重新定义”脚位,才是很多网上所探索的“GPIO” 内容,其实正确的说法应该是“Jetson 的 22 根 GPIO 引脚使用”才对,不过这里就不去纠正这些小问题,重点在于让大家更清楚剩下这 22 根引脚的用法。
事实上这些引脚也有两种处理方式:
1.透过 Jetson-IO 工具将特定引脚设置成为 SFIO 用途,然后配合特定的开发库;2.作为 GPIO 用途,透过 Jetson.GPIO 或其他开发库直接调用
网上大部分的混淆就在这个 Jetson-IO 工具与 Jetson.GPIO 库,前者是 Jetpack 自带的底层系统引脚配置工具,后者是针对 GPIO 引脚的应用层开发库,二者之间是不仅完全独立的,甚至某种角度上还有些许“互斥”的关系。
接下去带着大家将这两个工具认识清楚,这样日后的开发就会非常简单。
Jetson-IO引脚配置工具
前面已经清楚在 40 根引脚中有 18 根是固定好的不能重新定义,剩下的问题就是如何处理这 22 根“可重新定义”的引脚,是否有什么工具可以协助我们确认目前所有脚位的状态呢?这就是 Jetson-IO 的主要工作了,请执行以下指令,看看显示怎样的结果?
sudo /opt/nvidia/jetson-io/config-by-pin.py
是否看到显示从 1 到 40 的状态?核对一下,是不是除了前面所说 18 个 SFIO 位置之外的 22 个引脚,都显示“unused” 状态?这些呈现“unused”的脚位就是 GPIO 的状态,能用 Jetson.GPIO 库直接指派与调用。
如果要对这 22 个脚位进行重新定义,该使用什么方法来操作?Jetson-IO 工具就是扮演“配置脚位功能”的角色,这是 NVIDIA 从 L4T 32.3 版本开始,提供可以修改引脚定义的工具,在 Jetpack 烧录过程就编译到开发套件的 /opt/nvidia/jetsion-io 目录下,这是属于系统底层的配置工具。
因为设备所有 I/O 的默认配置是静态定义的,早期要更改 40 针扩展引脚定义时置,必须使用相应平台的 pinmux 电子表格去更新管脚配置,然后将新配置烧回开发套件中,虽然这是更新系统的一种适当方法,但在开发的阶段,需要一种更方便的方法,来测试不同的管脚配置。
Jetson-IO 工具就是要简化 40 针引脚 I/O 配置的修改任务,提供一套基于 Python 的简单代码,最终会将修改的内容写入设备树(DTB, Device Tree, Blob)固件,重启设备就能让新的设置生效,非常方便。
如果想要修改前面所提到的 22 根脚位定义,最轻松的方法就是执行以下步骤:
sudo /opt/nvidia/jetson-io/jetson-io.py
进入主菜单后,选择下面的“Configure 40-pin expansion header”,就会出现以下选择菜单视窗,透过“上下键”与“空键”选择要设定的组:
这里是根据“功能”的提供脚位组合,所定义的脚位与前面 40 针引脚定义图是完全对应的,也就是说在 18 根 SFIO 以外的脚位,必须经过 Jetson-IO 的配置之后,才会具备引脚图中的功能,但这个步骤并未出现在任何说明文件或网上教程之中,导致很多初学者完全无法理会其中的奥秘,我们在这里为大家打开这个黑箱子。
现在试着启动 spi1 组设置,Jetson-IO 工具会同时配置后面的 5 个脚位。设置完毕后选择“Save and reboot to reconfigure pins”,重启系统之后再执行:
sudo /opt/nvidia/jetson-io/config-by-pin.py
是否看到脚位[19, 21, 23, 24, 26]的状态,现在都出现“spi1”的标识了?
在 /opt/nvidia/jetson-io/ 目录下还有 config-by-function.py、config-by-pin.py 与 config-by-hardware.py 三个工具,根据不同目的查询与设置 GPIO 接脚属性。详细的内容请至https://docs.nvidia.com/jetson/archives/l4t-archived/l4t-325/index.html里“Hardware Setup”的“Configuring the 40-Pin Expansion Header”,有完整的使用说明。
Jetson.GPIO应用开发库
这是属于应用级的开发库,是针对“未被 Jetson-IO 设置为 SPIO”的 GPIO 引脚进行配置与运作的应用库。
例如引脚 19 在前面 Jetson-IO 配置为 spi1 功能之前,就是作为 GPIO 功能,可以用 Jetson.GPIO 库去指派与调用;但是经过 spi1 配置并重启之后,引脚 19 已经属于 SFIO 而非 GPIO,这时候如果用 Jetson.GPIO 库去指定这个引脚,就不会产生作用。
前面提过“从某种角度来说 Jetson.GPIO 与 Jetson-IO 是互斥的”,道理就在这个地方,一旦被 Jetson-IO 配置并启动的脚位,就不再属于 GPIO 的功能了。
这个 Jetson.GPIO 开发库并不在 Jetpack 安装包里,因此需要手动安装与从 github 上下载范例代码。下面指令可以简单安装这个库:
sudo pip3 install Jetson.GPIO
如果想要获得这个开发库的范例,就执行以下指令:
cd ~ && git clone https://github.com/NVIDIA/jetson-gpiocd jetson-gpio/samples
这里的范例都需要结合一些很基本的电子实验设备,例如面包板、LED 灯、杜邦线、小电阻、小电容之类的设备,实验内容非常简单,请自行采购相关元件并跟着说明执行就可以,这里不做这些范例的讲解。
至于还有些环境变量配置问题,也请参考开源项目内的说明,不过在 Jetbot 项目中都已经调试好了。
四种GPIO引脚调用模式
这是最后一个容易造成混淆的部分,因为作为 GPIO 用途的脚位有四种调用的模式,这也是因为过去长年积累的兼容性问题所导致的,不过只要搞清楚之后也都不是大问题。
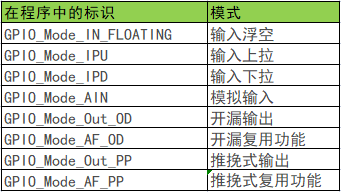
在代码一开始的时候,需要使用“GPIO.setmode(GPIO_MODE)”指令进行模式的指定,其中“GPIO_MODE”可以是以下四种:
1. GPIO.BOARD:这种模式的引脚是根据“1~40”的物理编号进行指定,是最简单易懂的方式,不过必须注意得避开已经设置为 SFIO 的引脚。例如:
GPIO.setmode(GPIO.BOARD)GPIO.setup(12, GPIO.IN) # 设置12号引脚为输入GPIO.setup(13, GPIO.OUT, initial=GPIO.HIGH) # 设置13号引脚为输出
这是最直观而且简单的模式,推荐初学者使用!
2. GPIO.BCM:这种编号是因为控制芯片主要来自于博通(Broadcom)公司,而他们自定义了一组 BCM 编码方式,在 Jetson Nano(含2GB)开发套件的针脚位背面所印刷的“Dxx”编号(如下图),就是 BCM 的编码。
下面是简单的调用方法,不过指定的脚位是根据 BCM 编码原则:
GPIO.setmode(GPIO.BCM)GPIO.setup(12, GPIO.IN) # 设置D12(BOARD的32)脚位为输入GPIO.setup(13, GPIO.OUT) # 设置D13(BOARD的33)脚位为输出
很多传统树莓派的项目里习惯使用 BCM 编码,仔细对照就能轻易理解。
3. GPIO.CVM与GPIO.TEGRA_SOC:这两种模式使用各 GPIO 管脚命名的字符串,作为设置引脚的参数,其中 CVM 是根据 CVM/CVB 连接器信号名称命名,TEGRA_SOC 是根据 Tegra SoC 中信号名称来命名的。例如:
GPIO.setmode(GPIO.TEGRA_SOC)GPIO.setup(‘SPI1_SCK’, GPIO.IN) # 设置BOARD的23脚位为输出GPIO.setup(‘SPI1_MISO’, GPIO.OUT) # 设置BOARD的21脚位为输出
结语
过去大家对于 NVIDIA Jetson 系列产品的深度学习能力是比较熟悉的,但是要将使用价值再扩展到工业场景的时候,也必须对这个 40 针引脚的用法有足够的掌握。
本文将大部分困扰初学者的问题进行较更有逻辑的梳理,日后只要大家能弄清楚 SFIO 与 GPIO 之间的差异、Jetson-IO 与 Jetson.GPIO 的不同,以及 GPIO 四种编码模式的对应脚位如何查找,其他的问题就是透过代码去熟练这些调用,也不必在乎是用 Python 库还是 C 语言库了。
原文标题:NVIDIA Jetson Nano 2GB 系列文章(43):Jetson的40针引脚
文章出处:【微信公众号:NVIDIA英伟达企业解决方案】欢迎添加关注!文章转载请注明出处。
-
NVIDIA
+关注
关注
14文章
4576浏览量
101637 -
代码
+关注
关注
30文章
4552浏览量
66642 -
GPIO
+关注
关注
16文章
1129浏览量
50481
原文标题:NVIDIA Jetson Nano 2GB 系列文章(43):Jetson的40针引脚
文章出处:【微信号:NVIDIA-Enterprise,微信公众号:NVIDIA英伟达企业解决方案】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
STM32GPIO口如果既要输入又要输出怎么办?STM32 GPIO口8种模式如何准确的分析?
A/D转换的四种误差
如何看贴片晶振脚位?不同脚位的贴片晶振有什么区别?
AD549JHZ实物的脚位是怎么排列的?
GPIO四种输出模式介绍
GPIO的四种输入模式介绍
关于STC单片机IO口状态双向、推挽、开漏、高阻四种状态切换的疑问
KEIL uVision4如何LDROM跳APROM,要怎样做可以使GPIO脚位电压不变?
M487开发板是否可以使用较完整的路径来控制脚位的输出?
【Milk-V Duo 开发板免费体验】LED电灯(GPIO设置)
GPIO的八种工作模式
IEC 61851标准中的四种EV充电模式






 工商网监
工商网监
评论