 Isaac Sim公测版带来数字孪生级别的机器人仿真
Isaac Sim公测版带来数字孪生级别的机器人仿真
由 NVIDIA 中国隆重推出的人工智能类音频节目再次开讲啦,在这里,你将与 NVIDIA 共同见证人工智能的磅礴力量与无限可能!
如果你也想度过科技相伴的时光,赶快在“喜马拉雅FM”与“蜻蜓FM”两大音频平台上搜索“NVIDIA 人工智能开讲”专辑,众多技术大咖带你深度剖析核心技术,把脉未来科技发展方向!
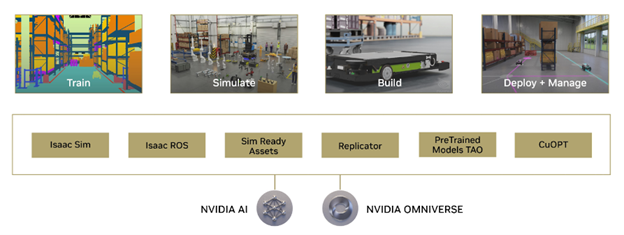
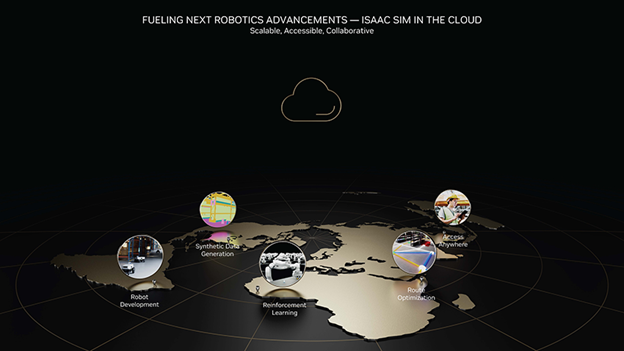
NVIDIA Isaac Sim 基于 NVIDIA Omniverse 平台而构建,是一个机器人模拟应用与合成数据生成工具。Isaac Sim 公测版的发布增加了经过改进的多摄像头支持功能、传感器功能以及一个 PTC OnShape CAD 导入器,让 3D 素材的导入变得更加轻松。从实体机器人的设计和开发、机器人的训练,到在“数字孪生”中的部署,这些新功能将全方位地扩大可以建模和部署的机器人和环境范围。
本期节目中,NVIDIA 技术专家将带领大家全面解析 Isaac Sim 公测版,了解新增的功能亮点、满足了哪些开发者需求、与传统方法相比改善了模拟环境中机器人测试和训练的缺点、将 Omniverse 平台引入 Isaac 机器人开发的重要意义,以及虚拟环境下的机器人开发未来趋势,又将面临怎样的挑战。
★
本期节目精彩内容
★
• Isaac Sim 公测版本最大的亮点是什么?
• Isaac Sim 公测版本增加了哪些功能?能够满足开发者什么样的需求?
• Isaac Sim 最新版本如何改善传统方法在模拟环境中进行机器人测试和训练的缺点
• Isaac SDK 除了模拟,还有哪些工具和框架可供开发者使用?
• 为什么会将 Omniverse 平台引入 Isaac 机器人开发?未来,虚拟环境下的机器人开发将有哪些发展趋势或挑战?
本期嘉宾介绍:
李雨倩
李雨倩(Lily),现任 NVIDIA 开发者关系总监,加拿大滑铁卢大学控制系统硕士毕业,至今一直专注于机器人技术的研究和应用。曾先后担任中航工业 613 研究所智能机器人导航算法负责人、加拿大 Avidbots 导航算法负责人、京东自动驾驶研发部技术负责人。现任职于 NVIDIA,负责机器人技术在 Jetson 平台的应用和发展,以及生态的搭建。
编辑:jq
-
机器人
+关注
关注
206文章
26974浏览量
201301 -
仿真
+关注
关注
50文章
3871浏览量
132132 -
人工智能
+关注
关注
1775文章
43716浏览量
230494
原文标题:NVIDIA 人工智能开讲 | Isaac Sim公测版带来数字孪生级别的机器人仿真
文章出处:【微信号:NVIDIA-Enterprise,微信公众号:NVIDIA英伟达企业解决方案】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
NVIDIA Isaac机器人平台升级,加速AI机器人技术革新
NVIDIA入局人形机器人!Isaac平台迎来重要更新

如何利用NVIDIA Isaac Sim对工作站的摄像头性能进行基准测试呢?

使用 NVIDIA Isaac 仿真并定位 Husky 机器人

LabVIEW的六轴工业机器人运动控制系统
NVIDIA Isaac 平台先进的仿真和感知工具助力 AI 机器人技术加速发展
基于Matlab和VR技术的移动机器人建模及仿真
从 0 到 1 搭建机器人 | 利用 NVIDIA Isaac Sim 创建虚拟环境进行仿真开发与测试
Omniverse 中文课程系列 7:使用 Isaac Sim 实现机器人仿真入门

基于 NVIDIA Jetson 使用硬件在环设计机器人

使用 NVIDIA Isaac Sim、ROS 和 Nimbus 开发多机器人环境

高校大学数字孪生教学实验室,虚拟仿真实训系统中心,数字孪生仿真实验室建设方案
COMPUTEX2023 | 达明机器人采用 NVIDIA Isaac Sim 优化自动光学检测

使用 ROS 2 MoveIt 和 NVIDIA Isaac Sim 创建逼真的机器人模拟





 工商网监
工商网监
评论