 刚刚起步的国产医用机器人产业迎来了好时光
刚刚起步的国产医用机器人产业迎来了好时光
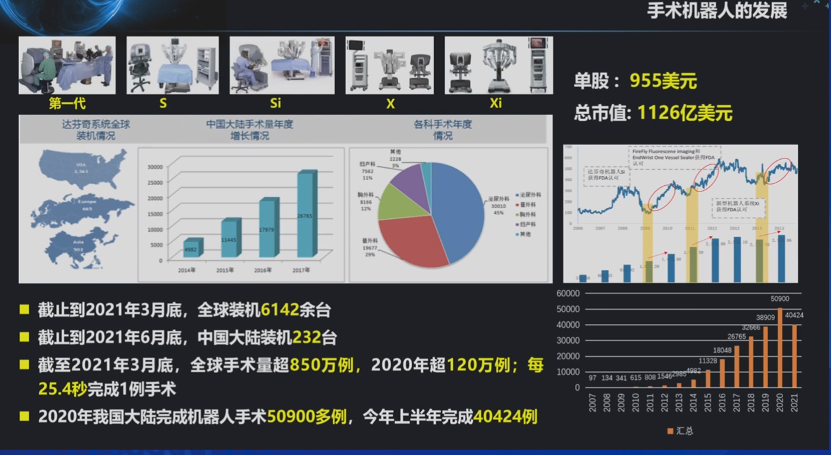
(文/程文智)说到医用机器人,人们比较容易想到能帮助医生做手术的“达芬奇”,它确实是目前全球最为成功的一款手术机器人。据统计截至今年3月,全球安装了6142台,截止今年6月底,国内安装了232台。今年上半年达芬奇在国内完成了4万多例手术,估计今年全年可完成10万例手术。
在国内,这几年医用机器人的发展速度也越来越快,特别是最近5到10年,出现了不少医用机器人公司。据苏州大学机电工程学院院长、机器人技术与系统国家重点实验室副主任孙立宁在第七届中国机器人峰会上介绍说,近期以医用机器人为名字的公司就有100多家,主要分布在长三角和珠三角地区,而且现在资本也很关注医用机器人产业。近期国内的医用机器人公司,比如微创、康多等公司的发展也很迅速。
在他看来,目前国内的医疗机器人生态圈基本已经成型,无论是高校、政府、资本、行业和标委会都在推动医疗机器人产业的创新与发展。
医用机器人产业规模
据中国食品药品检定研究院医疗器械检定所所长李静莉介绍,2020年全球医用机器人市场规模为180亿元,预计今年将达到207亿元,而中国的市场规模在2020年为41.5亿元,预计今年将达到47.7亿元,约占了全球市场规模的1/4。
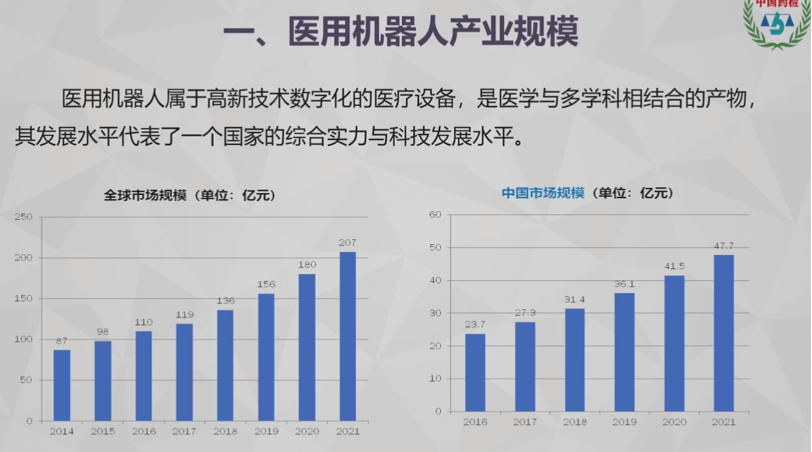
图:医用机器人产业规模
国内医用机器人的情况
来自哈尔滨工业大学的教授、机器人研究所副所长杜志江教授介绍了国内医用机器人,特别是手术机器人的发展情况。在他看来,目前已经进入到手术机器人的时代。
从医用机器人的特点来说,可分类为诊断型、操作型、康复型、服务型医用机器人。手术机器人一般是操作型的机器人,其最典型的代表是达芬奇。近几年来,达芬奇广为医院所接受,谈到具体原因时,杜志江教授表示有以下几个原因,一是,它继承了微创的理念;二是,可提供高清的视野;三是,学习曲线短;四是,术者在手术过程中不易疲劳。
因此,此类机器人出现以后,经过一段时间的市场培育后,现在,大部分的医院都是比较愿意接受这样的一套系统的。
其实,除了达芬奇以外,加拿大、荷兰、德国、英国、意大利、韩国和日本等国家在手术机器人方面都有布局,且纷纷拿到了他们国家的FDA认证,据说他们都想进入中国市场。
当然,除了这些国外的公司,国内也有不少公司推出了相关产品,比如哈尔滨的思哲睿、苏州康多、北京术锐、山东威高、上海微创、杭州术创、深圳精峰等等。
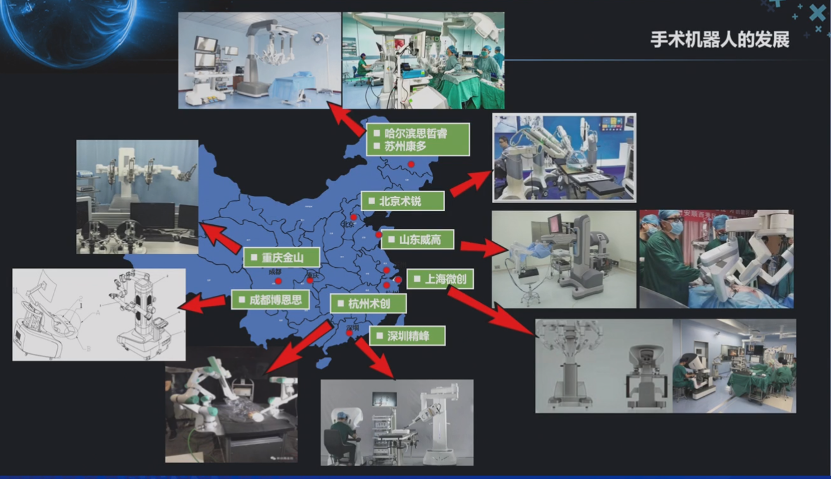
图:国内手术机器人主要供应商
据杜志江教授介绍,他们团队自2008年开始就致力于手术机器人的研究。2012年,在301医院的牵头下,哈工大、天津大学、南开大学几个大学一起在301动物实验室,使用手术机器人完成了活体动物实验,随后还完成了胆囊切除,及肾全切手术。
中国手术机器人的起步,开始于863计划的支持。杜志江表示,“最开始的项目就是腹腔镜手术机器人,虽然完成动物实验后,项目就可以结束了。但在刘老师的鼓励下,我们继续将这个系统往临床方面研究。”
他坦承,第一代手术机器人完全是从工科的思维出发,参照达芬奇系统进行设计研发的。后来在医生的参与下,他们给出了很多指导意见,比如以前很多东西无法在临床中应用,消毒很难解决、实时性等问题。为了解决这些临床中的问题,他们团队将整个系统都重新设计了,包括手术器件、控制台、控制系统等等。

图:杜志江教授团队开发的腹腔镜手术机器人
他同时谈到,国内的第一代医用机器人非常创新,但是临床上无法使用。当时大家都是用工科思维来做机器人,对医生需要什么、患者需要什么完全没有概念。杜志江举例说,“我们不知道病的位置,怎么辅助医生,也不知道手术过程中,医生真正用器械完成什么动作等等。”
国内医用机器人遇到的问题
杜志江教授还分享了一些他在多年做手术机器人过程当中观察到的一些情况,他主要归结为三个方面。
首先是创新与临床需求的关系。他认为做机器人研究创新是必要的,但一定要结合临床需求进行创新,而不能从工科思维出发,为了创新而创新,这样的话,最后在临床上会走不下去。
临床中医生的需求有很多,比如主从操作,多臂协同;对切口位置要求放宽;快捷摆位,减少准备时间;接口统一,能快速切换。
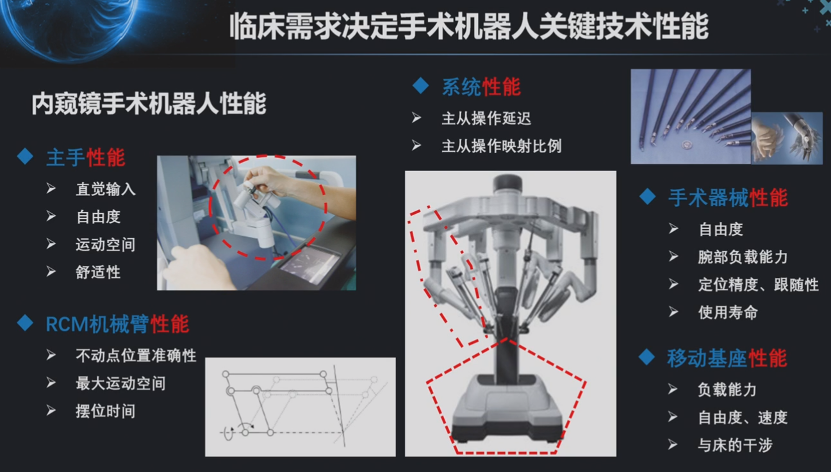
他拿内窥镜手术机器人的临床需求对手术机器人的性能要求举例说,从主手性能方面来说,
不能让医生在操作过程中考虑机器人往前、往后,他只考虑怎么做手术,主手必须完成医生的知觉输入,所有动作是下意识的,要识别出来。
从系统性能方面来说,一开始手术机器人的实时性都不行。实时性影响手术的流畅性,流畅性影响患者的安全性,实时性必须要保证。而你直接问医生多高的实时性能够满足要求,他们也是讲不出来的,只能通过感觉,不同的医生感觉不一样。有的人性子急,手术非常快,有的人手术慢一点,因此,对实时性的要求不一样。从系统的角度讲,主从操作的延迟性比较要达到最快医生的要求。
从RCM机械臂性能方面来说,医生做手术的时候,对腹壁的损伤都是有的,如果做不好,对患者伤害会很大,因此手术机器人在设计的时候就需要考虑不动点位置的准确性、最大运动空间,以及摆位时间问题。
第二是标准的问题,工业机器人跟医疗机器人的标准是不一样的。工业机器人大都是人机分离的,而医用机器人是人机共融的,从需求到状态都发成了根本性的改变,这样就要求有新的标准进行规范。事实上不仅是医用机器人,工业机器人也在制定从安全性、工作理念方面变更性的新标准,医用机器人更得做相应的标准。
目前国际机器人标准有ISO、IEC等,最近还成立了联合工作组,一开始叫JWG9,后来拆分成JWG35和36,其中35是针对手术机器人标准的,36是做康复机器人标准的。目前已经采用的两个标准是-77和-78。
第三是智能。现在的机器人离不开智能,但医用机器人的智能可能会变得更慎重。当年JWG9的时候,出台了T2,叫做60001-4-1,这也发布了。实际上来说,它对医疗机器人的智能分了16级,二个二进制,分了四个过程,按照现在从检查、诊断、确定手术方案、执行,这四大步骤由谁完成,到底是人还是机器,由机器完成代表水平高,由人完成代表水平低。按照这种分类的话,达芬奇这种处于第八级,执行层是机器完成的。
但是现在很多研究离临床还有很远的距离,反而智能水平达到15级,从检查开始都是自助完成的,但是这类系统真正进入临床还有非常遥远的距离。
首先智能程度跟风险等级没有直接的关系,但是它影响风险的管控过程。不是说智能高风险就高,但是需要进行管控。其次是引进智能以后,操作者和设备件的共同责任如何切分变得非常关键,这涉及到政策层面和法律层面,这是要关注的一点,不能真正在临床中引用智能,这要条规进行规范。
结语
目前手术机器人已经是临床的刚性需求,各科室的医生对此都非常感兴趣,它的形态和技术特性不取决于工科思维,而取决于临床需求和使用者反馈,此外,智能化也是目前大家所关注的,但不能为了追求智能而智能。
总的来说,国内医用机器人产业才刚刚起步,未来还有很长的路要走。
在国内,这几年医用机器人的发展速度也越来越快,特别是最近5到10年,出现了不少医用机器人公司。据苏州大学机电工程学院院长、机器人技术与系统国家重点实验室副主任孙立宁在第七届中国机器人峰会上介绍说,近期以医用机器人为名字的公司就有100多家,主要分布在长三角和珠三角地区,而且现在资本也很关注医用机器人产业。近期国内的医用机器人公司,比如微创、康多等公司的发展也很迅速。
在他看来,目前国内的医疗机器人生态圈基本已经成型,无论是高校、政府、资本、行业和标委会都在推动医疗机器人产业的创新与发展。
医用机器人产业规模
据中国食品药品检定研究院医疗器械检定所所长李静莉介绍,2020年全球医用机器人市场规模为180亿元,预计今年将达到207亿元,而中国的市场规模在2020年为41.5亿元,预计今年将达到47.7亿元,约占了全球市场规模的1/4。
图:医用机器人产业规模
国内医用机器人的情况
来自哈尔滨工业大学的教授、机器人研究所副所长杜志江教授介绍了国内医用机器人,特别是手术机器人的发展情况。在他看来,目前已经进入到手术机器人的时代。
从医用机器人的特点来说,可分类为诊断型、操作型、康复型、服务型医用机器人。手术机器人一般是操作型的机器人,其最典型的代表是达芬奇。近几年来,达芬奇广为医院所接受,谈到具体原因时,杜志江教授表示有以下几个原因,一是,它继承了微创的理念;二是,可提供高清的视野;三是,学习曲线短;四是,术者在手术过程中不易疲劳。
因此,此类机器人出现以后,经过一段时间的市场培育后,现在,大部分的医院都是比较愿意接受这样的一套系统的。
其实,除了达芬奇以外,加拿大、荷兰、德国、英国、意大利、韩国和日本等国家在手术机器人方面都有布局,且纷纷拿到了他们国家的FDA认证,据说他们都想进入中国市场。
当然,除了这些国外的公司,国内也有不少公司推出了相关产品,比如哈尔滨的思哲睿、苏州康多、北京术锐、山东威高、上海微创、杭州术创、深圳精峰等等。
图:国内手术机器人主要供应商
据杜志江教授介绍,他们团队自2008年开始就致力于手术机器人的研究。2012年,在301医院的牵头下,哈工大、天津大学、南开大学几个大学一起在301动物实验室,使用手术机器人完成了活体动物实验,随后还完成了胆囊切除,及肾全切手术。
中国手术机器人的起步,开始于863计划的支持。杜志江表示,“最开始的项目就是腹腔镜手术机器人,虽然完成动物实验后,项目就可以结束了。但在刘老师的鼓励下,我们继续将这个系统往临床方面研究。”
他坦承,第一代手术机器人完全是从工科的思维出发,参照达芬奇系统进行设计研发的。后来在医生的参与下,他们给出了很多指导意见,比如以前很多东西无法在临床中应用,消毒很难解决、实时性等问题。为了解决这些临床中的问题,他们团队将整个系统都重新设计了,包括手术器件、控制台、控制系统等等。
图:杜志江教授团队开发的腹腔镜手术机器人
他同时谈到,国内的第一代医用机器人非常创新,但是临床上无法使用。当时大家都是用工科思维来做机器人,对医生需要什么、患者需要什么完全没有概念。杜志江举例说,“我们不知道病的位置,怎么辅助医生,也不知道手术过程中,医生真正用器械完成什么动作等等。”
国内医用机器人遇到的问题
杜志江教授还分享了一些他在多年做手术机器人过程当中观察到的一些情况,他主要归结为三个方面。
首先是创新与临床需求的关系。他认为做机器人研究创新是必要的,但一定要结合临床需求进行创新,而不能从工科思维出发,为了创新而创新,这样的话,最后在临床上会走不下去。
临床中医生的需求有很多,比如主从操作,多臂协同;对切口位置要求放宽;快捷摆位,减少准备时间;接口统一,能快速切换。
他拿内窥镜手术机器人的临床需求对手术机器人的性能要求举例说,从主手性能方面来说,
不能让医生在操作过程中考虑机器人往前、往后,他只考虑怎么做手术,主手必须完成医生的知觉输入,所有动作是下意识的,要识别出来。
从系统性能方面来说,一开始手术机器人的实时性都不行。实时性影响手术的流畅性,流畅性影响患者的安全性,实时性必须要保证。而你直接问医生多高的实时性能够满足要求,他们也是讲不出来的,只能通过感觉,不同的医生感觉不一样。有的人性子急,手术非常快,有的人手术慢一点,因此,对实时性的要求不一样。从系统的角度讲,主从操作的延迟性比较要达到最快医生的要求。
从RCM机械臂性能方面来说,医生做手术的时候,对腹壁的损伤都是有的,如果做不好,对患者伤害会很大,因此手术机器人在设计的时候就需要考虑不动点位置的准确性、最大运动空间,以及摆位时间问题。
第二是标准的问题,工业机器人跟医疗机器人的标准是不一样的。工业机器人大都是人机分离的,而医用机器人是人机共融的,从需求到状态都发成了根本性的改变,这样就要求有新的标准进行规范。事实上不仅是医用机器人,工业机器人也在制定从安全性、工作理念方面变更性的新标准,医用机器人更得做相应的标准。
目前国际机器人标准有ISO、IEC等,最近还成立了联合工作组,一开始叫JWG9,后来拆分成JWG35和36,其中35是针对手术机器人标准的,36是做康复机器人标准的。目前已经采用的两个标准是-77和-78。
第三是智能。现在的机器人离不开智能,但医用机器人的智能可能会变得更慎重。当年JWG9的时候,出台了T2,叫做60001-4-1,这也发布了。实际上来说,它对医疗机器人的智能分了16级,二个二进制,分了四个过程,按照现在从检查、诊断、确定手术方案、执行,这四大步骤由谁完成,到底是人还是机器,由机器完成代表水平高,由人完成代表水平低。按照这种分类的话,达芬奇这种处于第八级,执行层是机器完成的。
但是现在很多研究离临床还有很远的距离,反而智能水平达到15级,从检查开始都是自助完成的,但是这类系统真正进入临床还有非常遥远的距离。
首先智能程度跟风险等级没有直接的关系,但是它影响风险的管控过程。不是说智能高风险就高,但是需要进行管控。其次是引进智能以后,操作者和设备件的共同责任如何切分变得非常关键,这涉及到政策层面和法律层面,这是要关注的一点,不能真正在临床中引用智能,这要条规进行规范。
结语
目前手术机器人已经是临床的刚性需求,各科室的医生对此都非常感兴趣,它的形态和技术特性不取决于工科思维,而取决于临床需求和使用者反馈,此外,智能化也是目前大家所关注的,但不能为了追求智能而智能。
总的来说,国内医用机器人产业才刚刚起步,未来还有很长的路要走。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
206文章
26964浏览量
201253 -
医疗电子
+关注
关注
30文章
1323浏览量
89562 -
医疗机器人
+关注
关注
3文章
211浏览量
55476
发布评论请先 登录
相关推荐
2024年,人形机器人迎来产业化元年
2023年,人形机器人Digit进入亚马逊工厂验证,2024年,特斯拉人形机器人,优必选、智元机器人有望分别进入特斯拉工厂和BYD工厂进行商业化验证,人形机器人迎来
发表于 01-23 11:30
•311次阅读
LabVIEW的六轴工业机器人运动控制系统
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核心角色
发表于 12-21 20:03
高动态人形机器人“夸父”通过OpenHarmony 3.2 Release版本兼容性测评
深圳开鸿数字产业发展有限公司(以下简称”深开鸿“)OpenHarmony生态建设能力和在新兴行业领域的技术创新实力,也标志着OpenHarmony在新兴行业领域又向前迈进了一步。
夸父人形机器人由深开
发表于 12-20 09:31
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递
发表于 11-30 16:01
ai人工智能机器人
的运营成本、人力成本还在不断提高(如:办公场地的租金、员工的工资、社保公积金、节假日福利等)。
如今的智能电话机器人,每天的电话拨打量可达800-1000通,相比人工提高了3-5倍,大大缩短了名单的筛选
发表于 09-21 11:09
基于Matlab和VR技术的移动机器人建模及仿真
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的机器人遥操作试验搭建了仿真平台 。 实验结果表明
发表于 09-20 06:24
中国机器人产业有望迎来黄金期
二是产品技术含量逐步提高,产品附加值明显上升。机器人核心零部件国产化进程不断加快,关键零部件自主可控率提高,前沿技术转化率高,技术迭代明显加快。机器人技术创新持续活跃,专利申请量居世界首位并保持上升
仿水熊虫医用微纳机器人应用及工作原理
由哈尔滨工业大学与哈尔滨医科大学科研人员联手合作开发的一款仿水熊虫医用微纳机器人,初步实现了在静脉血高速流环境中可控运动,并能在静脉血流中驻停时间达36小时以上。
发表于 06-14 15:23
•214次阅读

自编程机器人,售后难做吗?
自编程是如何完成的。
自编程其实也不是很高深的问题。
当用户给出参数时,有时也包括逻辑。
例如用户说,如果设备打开完毕,执行一个命令。
这个例子就包括了一个如果。你的智能机器人只需要生成一个
发表于 06-08 16:20
如何快速地让机器人投入生产
机器人也是一种设备,它主要内容是完成一个制造的其中一个功能。
制造一个产品,可以分为几个部件。和装配几个部件。
一个部件,可以是一个模具。或者由机器人完成组成一个模具。
机器人主要完成的是一些模具
发表于 06-06 16:18
机器人如何计算简单的运动
模型要具备齿轮,导轨几种基本的运动原理。
要分辨基本图形,视觉模型要能分辨圆形,方形和三角形。
有了这两点,机器人就基本上能计算开模和注塑这种简单的工作了。要替代人类的工作,还要进一步学习。
发表于 05-19 20:40
浅谈儿童陪护机器人
儿童陪护机器人越来越受到人们的关注,其中转动控制是其重要组成部分之一。步进电机芯片作为一种常用的控制芯片,被广泛应用于儿童陪护机器人中的转动控制。本文将从步进电机芯片的工作原理、优势和应用场景等方面
发表于 05-11 15:12





 工商网监
工商网监
评论