 特斯拉AI主管解释为何不用激光雷达:我们有超算和深度学习
特斯拉AI主管解释为何不用激光雷达:我们有超算和深度学习
从当下各大汽车OEM在新车上采用的自动/辅助驾驶方案来看,不少用到了英伟达、Mobileye或是地平线的高性能芯片,也有用到Lumina、Velodyne或览沃的激光雷达。但归根结底这些都是机器视觉加上先进传感器的方案,而特斯拉却一直坚持采用摄像头的纯视觉方案,成了诸多车厂中的一个“异类”。
在上月举办的机器视觉和模式识别国际会议(CVPR 2021)上,特斯拉AI主管Andrej Karpathy解释了为何特斯拉用不到激光雷达。Andrej Karpathy毕业于斯坦福大学,也是AI大神李飞飞的得意门生之一,他在毕业后成了OpenAI的一位研究员,随后被埃隆·马斯克亲自挖去特斯拉做AI主管。
低成本、易维护且方便更新的纯视觉系统
深度神经网络是自动驾驶技术的主要技术之一,通过处理车载摄像头传输的数据来分析道路、标志、汽车、障碍和行人。但深度学习在图像中检测物体往往会出现失误,因此多数自动驾驶公司,比如Waymo等,都采用激光雷达来绘制车身周围的3D地图,补全神经网络缺失的信息。
然而Andrej提到,激光雷达在自动驾驶上也有自己的难处,你必须用高成本的激光雷达预绘制环境,然后创建高分辨率地图,将街道和交通灯联系在一起,最后只能局限于这些地图来驾驶。不过,绘制每个地点的精确地图是相当困难的,并不是路测车辆收集构建好这些高分辨率地图就完事了,还需要长期的维持工作,很难保证这些基础设备和数据的更新工作。
特斯拉并没有采用激光雷达和高分辨率地图结合的方案,Andrej称“对特斯拉来说,一切都是初次发生的,单单靠车身上的八个摄像头”。经过几年的迭代,特斯拉的自动驾驶工作绝大多数都是由摄像头实现,以至于车身上其他的传感器开始“吃灰”。为此,特斯拉也在今年5月宣布,即日起北美制造的Model 3和Model Y也不再配备毫米波雷达,全面过渡到以摄像头为主,辅以超声波雷达的特斯拉视觉系统。
自动标注生成的数据集和高效的神经网络
在许多激光雷达和摄像头的参数性能比较中,测距往往都是摄像头的弱项。然而,人类本身也是用“眼镜”这一纯视觉方案来进行距离和速度判断的,那么人工神经网络能否做到这一点呢?Andrej称在过去几个月的研究工作中发现,这个问题的答案是肯定的。
特斯拉的工作室为了创建这样一个可以精确检测物体距离、速度和加速度的深度学习系统,将这一挑战视为监督式学习的问题。监督式学习是机器学习中常用的一个方法,此处则被用于在标注数据训练后,让神经网络学习如何检测物体和它们的附加属性。
而打造这样一个系统,需要的是大量的视频数据、清晰精确的标准数据和诸多极端情况组成的数据集。
特斯拉与其他具备数据采集能力的汽车品牌相比有着一个独到的优势,那就是数量。有了百万辆配备摄像头的汽车,特斯拉根本不愁数据量。
在雨雪等条件下依然能够正常运转的自动标注 / 特斯拉
那么这种标注是如何进行的呢?一种可行方案是依靠数据标注公司进行手工标注,但这样做的话不仅耗时耗力,成本也不低。特斯拉的自动标注技术结合了神经网络、雷达数据和人类审查。由于这一数据集是离线标注的,所以神经网络可以来回播放视频,将预测与事实进行比对,从而调整其参数,恰恰与实时运行的测试时推理相反。
这种离线标注还有一个好处,那就是特斯拉工程师得以实现无法部署在车上的密集运算型物体检测网络,将其用于低延迟的实时应用中去。而雷达的数据只是用于进一步验证神经网络的推理,这个过程还可以让人工介入,进行一些判断上的编辑、验证和调整工作。
为了实现更好的速度和加速度判断,在打造这一数据集的过程中,特斯拉团队花了4个月时间开发了221个触发器来指出物体检测系统上还需哪些调整,比如雷达与视觉对比不符、物体边框抖动、纯靠主摄像头进行的检测等等。这些触发器部署在消费车辆中,进行了7轮静默模式的运转,这些触发器并不会对车辆下达任何指令,而输出的数据会和雷达数据和驾驶员本身行为进行比较。
最后生成的数据集中,特斯拉自动驾驶团队已经收集了1.5PB的数据,由100万个10秒视频和60亿物体标注组成。
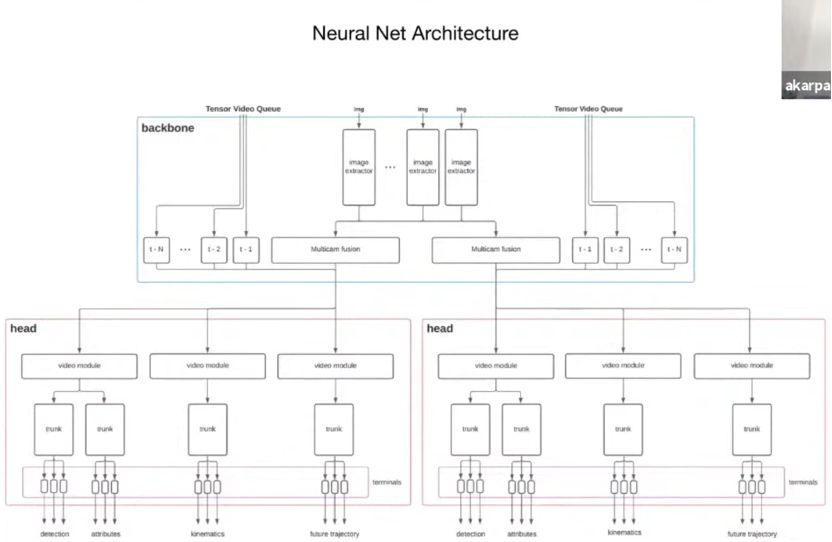
特斯拉自动驾驶神经网络架构 / 特斯拉
为了充分利用这一数据集,特斯拉自动驾驶团队打造了一个高效的循环神经网络。数据经过多层次的网络结构,从而输出多个参数。这种架构为分布式分工创造了条件,当前特斯拉有一个由20人左右组成的团队,他们正在全力训练这一神经网络,负责各自的模块。
用来训练深度学习模型的超级计算机
为了处理如此庞大的工作量自然也需要强大的机器,特斯拉当前有三台用于自动驾驶开发的超算集群。其中最新的一台包含720个节点,每个节点都由8张英伟达A100 80GB加速卡组成,等于一台机器就内置了5760个GPU。该机器的算力达到了惊人的1.8 EFLOPS,配备了10PB的顶级NVME存储,速率达到1.6 TBps。
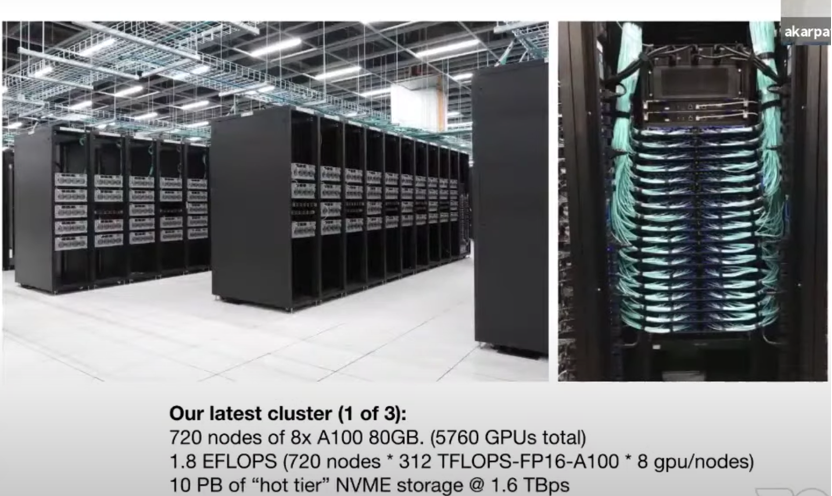
内部超级计算机 / 特斯拉
除此之外,为了保障自动驾驶的流畅运行,其自研的FSD自动驾驶芯片也有着强悍的性能。特斯拉的优势在于其垂直集成的开发,这意味着不论是其CPU、GPU还是NPU,都能最大限度地利用这一神经网络驱动的视觉方案。

FSD自动驾驶芯片 / 特斯拉
小结
目前特斯拉的FSD自动驾驶系统已经进入了测试阶段,已经有2000余名的车主在使用这一技术。特斯拉也在继续开发这一系统,加入更多的驾驶功能。

NHTSA对4月27日前后生产的Model Y评级 / NHTSA
不过,特斯拉抛弃毫米波雷达的做法也引来的一些是非,美国国家公路交通安全管理局(NHTSA)表示,取消毫米波雷达的Model 3和Model Y将失去具备部分先进安全功能的标签。尚不清楚这未来经过测试调研后,几款车型会不会重新获得这些认证,不过可以肯定的是,特斯拉已经打算在摄像头为主的纯视觉方案上坚定不移地走下去了。
在上月举办的机器视觉和模式识别国际会议(CVPR 2021)上,特斯拉AI主管Andrej Karpathy解释了为何特斯拉用不到激光雷达。Andrej Karpathy毕业于斯坦福大学,也是AI大神李飞飞的得意门生之一,他在毕业后成了OpenAI的一位研究员,随后被埃隆·马斯克亲自挖去特斯拉做AI主管。
低成本、易维护且方便更新的纯视觉系统
深度神经网络是自动驾驶技术的主要技术之一,通过处理车载摄像头传输的数据来分析道路、标志、汽车、障碍和行人。但深度学习在图像中检测物体往往会出现失误,因此多数自动驾驶公司,比如Waymo等,都采用激光雷达来绘制车身周围的3D地图,补全神经网络缺失的信息。
然而Andrej提到,激光雷达在自动驾驶上也有自己的难处,你必须用高成本的激光雷达预绘制环境,然后创建高分辨率地图,将街道和交通灯联系在一起,最后只能局限于这些地图来驾驶。不过,绘制每个地点的精确地图是相当困难的,并不是路测车辆收集构建好这些高分辨率地图就完事了,还需要长期的维持工作,很难保证这些基础设备和数据的更新工作。
特斯拉并没有采用激光雷达和高分辨率地图结合的方案,Andrej称“对特斯拉来说,一切都是初次发生的,单单靠车身上的八个摄像头”。经过几年的迭代,特斯拉的自动驾驶工作绝大多数都是由摄像头实现,以至于车身上其他的传感器开始“吃灰”。为此,特斯拉也在今年5月宣布,即日起北美制造的Model 3和Model Y也不再配备毫米波雷达,全面过渡到以摄像头为主,辅以超声波雷达的特斯拉视觉系统。
自动标注生成的数据集和高效的神经网络
在许多激光雷达和摄像头的参数性能比较中,测距往往都是摄像头的弱项。然而,人类本身也是用“眼镜”这一纯视觉方案来进行距离和速度判断的,那么人工神经网络能否做到这一点呢?Andrej称在过去几个月的研究工作中发现,这个问题的答案是肯定的。
特斯拉的工作室为了创建这样一个可以精确检测物体距离、速度和加速度的深度学习系统,将这一挑战视为监督式学习的问题。监督式学习是机器学习中常用的一个方法,此处则被用于在标注数据训练后,让神经网络学习如何检测物体和它们的附加属性。
而打造这样一个系统,需要的是大量的视频数据、清晰精确的标准数据和诸多极端情况组成的数据集。
特斯拉与其他具备数据采集能力的汽车品牌相比有着一个独到的优势,那就是数量。有了百万辆配备摄像头的汽车,特斯拉根本不愁数据量。
在雨雪等条件下依然能够正常运转的自动标注 / 特斯拉
那么这种标注是如何进行的呢?一种可行方案是依靠数据标注公司进行手工标注,但这样做的话不仅耗时耗力,成本也不低。特斯拉的自动标注技术结合了神经网络、雷达数据和人类审查。由于这一数据集是离线标注的,所以神经网络可以来回播放视频,将预测与事实进行比对,从而调整其参数,恰恰与实时运行的测试时推理相反。
这种离线标注还有一个好处,那就是特斯拉工程师得以实现无法部署在车上的密集运算型物体检测网络,将其用于低延迟的实时应用中去。而雷达的数据只是用于进一步验证神经网络的推理,这个过程还可以让人工介入,进行一些判断上的编辑、验证和调整工作。
为了实现更好的速度和加速度判断,在打造这一数据集的过程中,特斯拉团队花了4个月时间开发了221个触发器来指出物体检测系统上还需哪些调整,比如雷达与视觉对比不符、物体边框抖动、纯靠主摄像头进行的检测等等。这些触发器部署在消费车辆中,进行了7轮静默模式的运转,这些触发器并不会对车辆下达任何指令,而输出的数据会和雷达数据和驾驶员本身行为进行比较。
最后生成的数据集中,特斯拉自动驾驶团队已经收集了1.5PB的数据,由100万个10秒视频和60亿物体标注组成。
特斯拉自动驾驶神经网络架构 / 特斯拉
为了充分利用这一数据集,特斯拉自动驾驶团队打造了一个高效的循环神经网络。数据经过多层次的网络结构,从而输出多个参数。这种架构为分布式分工创造了条件,当前特斯拉有一个由20人左右组成的团队,他们正在全力训练这一神经网络,负责各自的模块。
用来训练深度学习模型的超级计算机
为了处理如此庞大的工作量自然也需要强大的机器,特斯拉当前有三台用于自动驾驶开发的超算集群。其中最新的一台包含720个节点,每个节点都由8张英伟达A100 80GB加速卡组成,等于一台机器就内置了5760个GPU。该机器的算力达到了惊人的1.8 EFLOPS,配备了10PB的顶级NVME存储,速率达到1.6 TBps。
内部超级计算机 / 特斯拉
除此之外,为了保障自动驾驶的流畅运行,其自研的FSD自动驾驶芯片也有着强悍的性能。特斯拉的优势在于其垂直集成的开发,这意味着不论是其CPU、GPU还是NPU,都能最大限度地利用这一神经网络驱动的视觉方案。
FSD自动驾驶芯片 / 特斯拉
小结
目前特斯拉的FSD自动驾驶系统已经进入了测试阶段,已经有2000余名的车主在使用这一技术。特斯拉也在继续开发这一系统,加入更多的驾驶功能。
NHTSA对4月27日前后生产的Model Y评级 / NHTSA
不过,特斯拉抛弃毫米波雷达的做法也引来的一些是非,美国国家公路交通安全管理局(NHTSA)表示,取消毫米波雷达的Model 3和Model Y将失去具备部分先进安全功能的标签。尚不清楚这未来经过测试调研后,几款车型会不会重新获得这些认证,不过可以肯定的是,特斯拉已经打算在摄像头为主的纯视觉方案上坚定不移地走下去了。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2522文章
47984浏览量
739698 -
特斯拉
+关注
关注
66文章
5970浏览量
125655 -
AI
+关注
关注
87文章
26363浏览量
263957 -
激光雷达
+关注
关注
958文章
3628浏览量
186535
发布评论请先 登录
相关推荐
硅基片上激光雷达的测距原理
硅基光电子技术的发展可以将激光雷达系统发射模块和接收模块中分立的有源和无源器件集成在芯片上,使激光雷达体积更小、稳定性更强、成本更低,推动激光雷达在自动驾驶等领域的应用。
发表于 04-08 10:23
•107次阅读

华为激光雷达参数怎么设置
华为激光雷达是一种常用的传感器技术,可用于距离测量和感应。它的参数设置对于确保其性能和功能至关重要。在本文中,我们将详细介绍华为激光雷达的参数设置以及其影响和应用。 首先,我们需要了解
邀中国激光雷达龙头海外建厂,特斯拉不是造车而是造机器人?
计划在墨西哥建厂的特斯拉,准备邀请两家中国供应商出海建厂,其中一家还是激光雷达供应商禾赛科技。主打一个转向“纯视觉”方案的特斯拉,为何还会邀请激光雷

一文通过AEC-Q102车规级芯片测试认证了解激光雷达核心技术及行业格局
,甚至前车的下方空间进行探测,为视觉系统提供更丰富的数据。
激光雷达被认为是 L3 级及以上自动驾驶必备传感器。激光雷达兼具测距远、角度分辨率优、受环境光照影响小的特点,且无需深度学习
发表于 09-19 13:35
固态激光雷达通常分为哪三种类型?mems固态激光雷达
固态激光雷达通常分为哪三种类型?mems固态激光雷达 固态激光雷达是一种基于激光技术的高精度测量仪器,它利用激光器发射
简述激光雷达的结构原理分类及特点 TIM320激光雷达的工作原理
和信号处理系统。其主要由三个部分组成: 光源系统、探测器和信号处理部分。接下来,我们将从结构原理、分类及特点和 TIM320激光雷达的工作原理三个方面进行详细的分析。 激光雷达的结构原理 光源系统是
激光雷达是什么 激光雷达介绍
激光雷达在自动驾驶应用中主要用来探测道路上的障碍物信息,把数据和信号传递给自动驾驶的大脑,再做出相应的驾驶动作,但室外常见的干扰因素如雨、雾、雪、粉尘、高低温等对激光雷达的识别造成了极大的影响。因此
激光雷达基础介绍与仿真测试流程
作者|七七沫沫小编|吃不饱随着智能驾驶领域的快速发展与普及,激光雷达的轻量化、电子化和芯片化也逐渐成为趋势。由于激光雷达不受光线影响、分辨力高、支持3D立体,点云还支持AI算法训练等优点,一些主流

拆了5款激光雷达后,我摸清了里面的元器件!
供应链的探讨中,我们只讨论TOF激光雷达,不对FMCW的激光器、调制器等部件展开论述。 编辑:感知芯视界 获取700页深度激光雷达技术与市场

激光雷达和毫米波雷达的优势
其实传感器之间,因为感知的原理不同,大家的赛道也不同,比如激光雷达的分工就是做精细的感知,做地图构建,检测马路牙子之类的,像扫街车要装激光雷达扫马路牙子。
发表于 05-04 15:58
•648次阅读





 工商网监
工商网监
评论