 亚信推出最新AxRobot EtherCAT七轴助力控制机器手臂解决方案
亚信推出最新AxRobot EtherCAT七轴助力控制机器手臂解决方案
利用亚信AX58200 EtherCAT从站马达驱动关节模块化设计,有效地减少每个机器手臂关节中马达驱动板所需占用的空间大小与内部线路配置的复杂度,进而降低机器手臂关节硬件设计成本与设备维护难度。
[台湾新竹讯, 2021年6月23日]
因应全球制造业对人机协作(Human-Robot Collaboration,HRC)智能生产自动化的强大需求,亚信电子于2019年推出大中华区首款AX58200 2/3端口EtherCAT从站专用通讯SoC后,积极投入研发EtherCAT协作型机器人产品应用技术。为了加速客户导入工业以太网EtherCAT通信技术,亚信电子今天推出AxRobot EtherCAT七轴助力控制机器手臂解决方案。客户可使用AxRobot机器手臂软件控制器做为EtherCAT主站,搭配AX58200 EtherCAT从站七轴助力控制机器手臂,即可利用工业以太网EtherCAT通信技术,进行AxRobot七轴助力控制机器手臂软件控制功能的评估与相关产品开发设计。此方案可适用于各种智能生产自动化协作型机器人相关产品应用。
(图一)亚信AxRobot EtherCAT七轴助力控制机器手臂解决方案
AxRobot机器手臂解决方案,利用亚信AX58200 EtherCAT从站马达驱动关节模块化设计,有效地减少每个机器手臂关节中马达驱动板所需占用的空间大小,降低机器手臂关节硬件设计成本。另外,使用EtherCAT菊花链(Daisy-Chain)拓扑连接技术,进行机器手臂关节间的网络通信,可以简单地使用网路线从第一轴关节一直串联到第七轴关节,大大地简化机器手臂关节中内部线路配置的复杂度,从而降低机器手臂设备维护的成本与难度。
一般协作型机器手臂透过装置力量传感器,来获取外界接触力量的资讯,进而实现智能工厂自动化所需的人机协作功能。AxRobot助力控制机器手臂解决方案,无需额外安装价格昂贵的力量传感器,透过内置的马达助力控制器功能,即可侦测外部突发碰撞事件,紧急停止机器手臂的运作并发出错误警报讯息,以确保在人与机器协作过程中操作人员的安全。
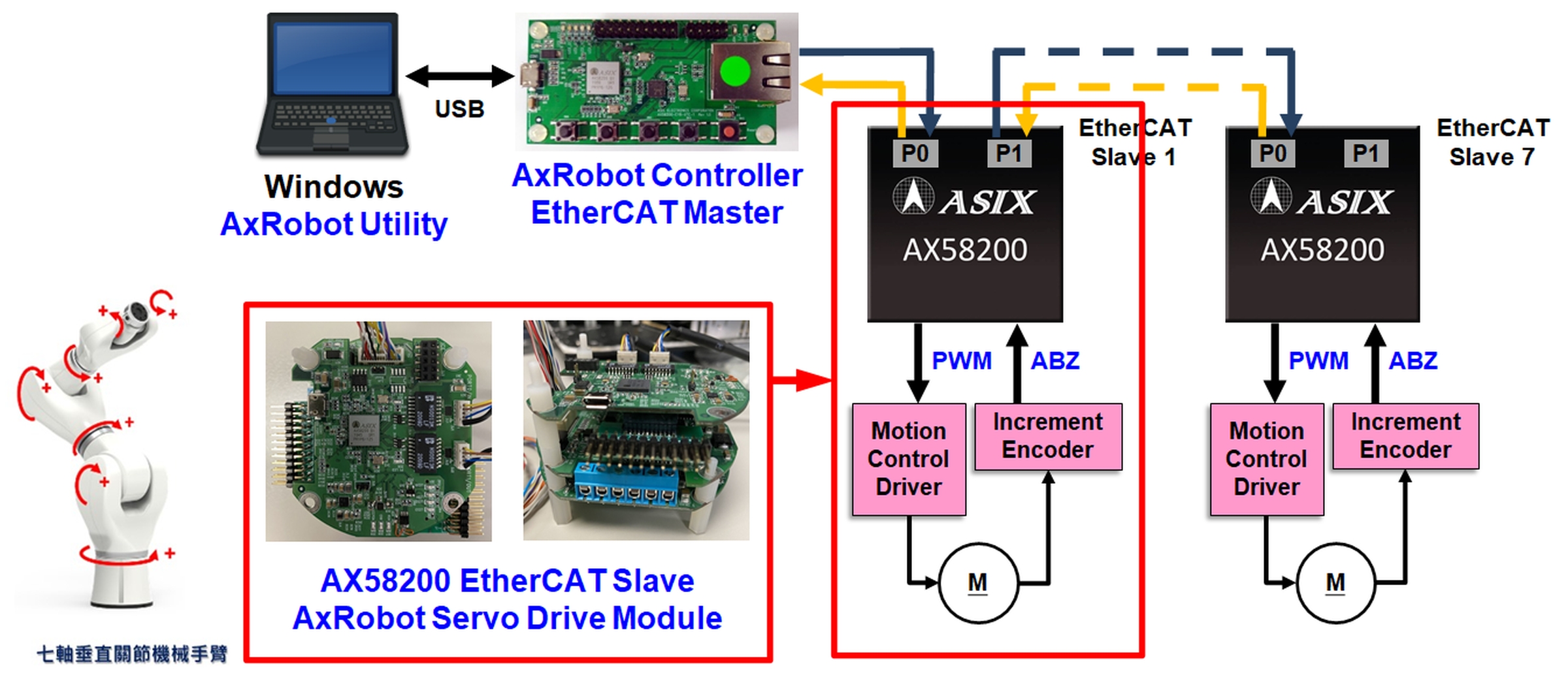
(图二)亚信AxRobot EtherCAT七轴助力控制机器手臂应用方块图
亚信电子可提供AxRobot EtherCAT七轴助力控制机器手臂开发套件,方便客户进行AxRobot七轴助力控制机器手臂软件控制功能评估。另外,亚信电子可依据客户产品设计的需求,提供AxRobot EtherCAT七轴助力控制机器手臂的开发设计服务。亚信拥有最优秀的技术团队提供客户最专业、最及时的技术服务。需要进一步亚信产品设计服务或产品相关资讯,欢迎透过电子邮件接洽业务人员sales@asix.com.tw,或访问亚信电子公司网站https://www.asix.com.tw/。
-
ASIX
+关注
关注
0文章
11浏览量
9251 -
ethercat
+关注
关注
17文章
441浏览量
37681 -
机器手臂
+关注
关注
1文章
18浏览量
11456
发布评论请先 登录
相关推荐
基于VPLC711的曲面外观检测XYR运动控制解决方案
开放式高实时高性能PLC控制器解决方案-基于米尔电子STM32MP135
机器视觉运动控制一体机在光伏汇流焊机器人系统的解决方案
EtherCAT总线运动控制的优势主要体现在哪?
基于PC的机器人控制解决方案


EPR6-S工业机器人通过EtherCAT转profinet网关接入西门子系统
亚信电子于IAS 2023展出最新工业以太网整体解决方案






 工商网监
工商网监
评论