 协作机器人与工业机器人必然殊途同归
协作机器人与工业机器人必然殊途同归
协作机器人现在还是很火!这是废话,不谈了。 从协作机器人面世开始,关于协作机器人是否会取代工业机器人的讨论一直未停过。
我的理解是,协作机器人处于发展的初级阶段,市场规模逐年扩大,但还处于向工业机器人“虎口夺食”的状态,现在谈协作机器人要把工业机器人“灭了”只能说“风口上的猪,吹着吹着飘了”。
协作机器人的定义是指被设计成可以在协作区域内与人直接进行交互的机器人,可以理解为共享工作空间与协同作业,核心是安全。当前协作机器人对安全的主流设计采用的是降速与碰撞检测。
试想如果工业机器人有额外的技术使其变得安全,那工业机器人与协作机器人之间其实就不会像是看着“粗壮的、跑得快的”是工业机器人,而“长得像UR的”就被认为是协作机器人,当前技术水平的限制使得现有的工业机器人与协作机器人界线分明,而随着技术的发展,协作机器人与工业机器人必然殊途同归。
事实上,“超界者”已经出现了。
ABB最新发布的CRB 1100就是一个典型的例子。从外形上看,CRB 1100跟IRB 1100 差别不大,只不过是增加了一个激光扫描仪,通过感知人体与机器人的距离来调整机器人的工作状态,以此达到安全目的。这样的CRB 1100就成为了“合理合法”的协作机器人,同时保留了工业机器人的高速、高精度。
协作机器人也有向工业机器人性能靠拢的明显趋势,负载上,从最开始的UR3、UR5、UR10,现在已经往12KG、15KG、20KG、30KG等更高负载发展;精度上,从最初的0.1mm开始慢慢变成0.05mm、0.03mm、0.02mm;速度上,从1m/s变成1.5m/s、3m/s…… 这一切都在说明,工业机器人与协作机器人正在发生融合,最终所有机器人都应该具备安全特性,只是针对不同的应用场景,机器人的形态不同而已。
我不同意协作机器人这个“后浪”会把工业机器人这个“前浪”拍死在沙滩上,但我认为工业机器人最终必然会消失。而打败工业机器人的不是协作协作机器人,而是时代。
工业机器人的产生背景是规模化、精细化生产。把一个产品分散成模块化组件,组件再分解为标准化零件,把生产工艺切割成若干个标准化流程,这是工业机器人最擅长的。
然而,一方面个性化的需求越来越多,限量版、定制版越来越受欢迎,当技术上去了,成本下来了,“奢侈品”规模化生产的需求就会大大减弱;另一方面,让我们开一下脑洞,如果对产品的分解突破原材料将发生什么?
如果有一天,我们对物质的成型不再止于原材料,而是可以控制构成一切物质的基本粒子——原子的话,那生产方式就可以实现一步到位。3D打印是我能想到的最接近的描述。
当前的3D打印是塑料,正在发展的3D打印是金属,那么如果被打印的是原子,是不是就变成万物皆可打印了?
听起来似乎很遥远,但也不是不可能。所以说当时代变了,生产方式发生本质的改变,游戏规则变了,协作机器人与工业机器人之间重叠部分也必将消失,只有特定的应用场景被保留下来。
本体之变
想象一下,协作机器人后续可能会发生什么变化? 首先是本体。其实协作机器人可以看作是工业机器人向模块化、集成化、安全化探索下的产物。
两者都离不开电机、减速机、编码器、驱动器、控制器,只是原来在工业机器人中,这些零部件在各家的设计中摆放各不相同,而协作机器人巧妙地把这些集成到一个关节模组中,通过大小不同、数量不一的模组,加上不同形状的连杆,就成了不同的机器人。
以下图的6轴工业机器人为例,6个关节中12346采用电机与减速机直连,5轴采用同步带传动的方式把电机往后面放(这是比较简单的方式,还有其他各种复杂的设计就不一一列出),外面再连接一个电控柜,电控柜主要零部件是6个驱动器与1个控制卡(其他辅助的暂忽略)。
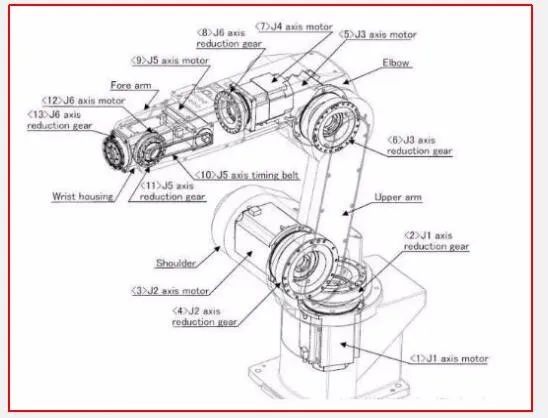
再看协作机器人:
1、把同步带传动去掉,把额外的齿轮传送去掉,只保留电机与减速机直连的方式。
2、把1个电机编码器分成2个编码器分别分布在输入端与输出端,把电池省掉了。
3、电机去掉外壳,与减速机集成到一起。
4、由于电机采用低压,驱动器可以做得很小,于是驱动器从控制柜就拉出来,与电机集成到一起分布到各个关节中。
正在发生和未来将发生的“本体之变”如何?
1、模组的规格会进一步拓展。
按照谐波减速器的规格,目前模组拥有14、17、20、25、32这5种规格,覆盖目前从1kg到20kg负载的机器人规格。随着协作机器人向大负载发展, 32的谐波已经不能满足需求,再往上就是40谐波、50谐波或者RV减速机才能满足需求。而往小了走,可能会出现比14还小的谐波,或者非金属减速机以达到小型轻量的目的。
2、力传感器会“消失”。
目前的协作机器人设计大部分采用的是电流反馈做力控,没有配置力传感器。而高端玩家是在输出端增加了力传感器,这一步其实相当艰难,力传感器的设计调试都相当困难,算法我们先不谈,光是力传感器本身的制造工艺性、可靠性、维护性目前都是一大瓶颈,价格还很高昂。而在未来,力传感器必然会流行起来甚至变成标配,最终则会“消失”,与减速机融为一体。于是,各家在机械部分的差距会缩小,算法将是制胜关键。
3、减速机最终会消失,是真的消失。
减速机的作用顾名思义是减速增力,是因为在当前的技术限制下,伺服电机的力矩密度太小,在功率相同的情况下,把速度降下来,就可以把力矩提升上去。
未来很可能直驱电机会代替电机+减速机的组合,早在20多年前,Adept就有直驱版SCARA——AdeptOne,只是到现在为止还是卡在直驱电机的体积、重量、控制上未能有明显突破。假设直驱能做得够小,同步带传动、齿轮传动也会消失,一个直驱电机就是一个关节,并且由于没了减速机的缓冲,外部力直接反馈到电机,力传感器也不用了。
届时。所谓工业机器人与协作机器人,只不过是直驱电机以何种外壳与连杆包覆而已。
4、控制柜也会“消失”。
控制柜这个“累赘”是早在20多年前的大神们就想踢掉的,各类研究与样机不断,只是苦于各种客观因素一直未有真正量产的产品出来。国产中直到2013年李群在DELTA机器人中率先把控制器放到了DELTA的基座中,再往后ABB、EPSON也相继有无控制柜的产品面世。
在无控制柜的路上,当前主要有两个方向,一个是“驱控一体”,把驱动器与控制器融为一体,并且高度集成,小到可以放到机器人底座里;另一个就是现在协作机器人在做的,采用低压驱动,把驱动器打散跟电机集成到一起。
最终控制器是否也会打散分布到各个关节当中呢?这样一来,就变成每一个关节都是一个独立的机器人,一台机器人就变成了若干个机器人的协同合作。这在现在的技术水平下已经可以实现,只是受限于体积与成本,只在实验室看到过这样的概念机,但是相信在不久的将来会有这样的产品出现。
5、线缆会逐步减少乃至消失。
传统工业机器人的做法是把所有的线缆从各个关节引到基座,然后基座与电控之间再由一根或两根很粗的线缆连接。李群的做法是把电控柜放到了基座里,这样外部的线缆就没了,但是各个关节的线缆还是需要引到基座,而UR的做法是把驱动打散分到各个关节,这样各个关节形成串联的形式,大大减少了线缆数量。
关节与关节之间的线缆主要是通讯与供电。 假设未来无线通讯足够强大,比如从5G发展到50G,足够快,足够安全的时候,各关节之间完全可以使用无线传输信号。而供电方面,现在无线供电已经在照明、传感器等领域有产品出现,转到机器人上只是时间问题。
人机交互之变
协作机器人定义的两个重点是共享空间与协同作业。共享空间现在已经做到了,但还有很大的改善空间,而协同作业,现在还只是开了个头而已。
首先,共享空间的前提是安全,现在的安全策略还停留在被动防御上。以UR为典型,安全策略是速度慢,一旦人体碰到,机器人会马上停止运动,最大限度减少伤害。而以KUKA iiwa为典型的是增加力传感器,进一步增加力反馈的及时性与准确性。
再有就是在碰撞检测的基础上包一层缓冲材料,甚至缓冲材料本身也是一种传感器,提供缓冲的同时,也可以检测到接触并马上停止。
以上都是接触式防御,现在市场上也出现了“非接触式”的防御。如越疆科技的电子皮肤,在人体接近机器人时,机器人停止动作甚至主动避障;也有ABB的CRB 1100,当人处于机器人工作空间外的时候就已经开始监测,按人体离机器人的距离来决定机器人的动作。
以上防御都切实有效,但都各有漏洞,要么是离机器人很近才被感知到,要么是把人体当成一个质点来监测整体距离。目前国外的实验室也有在研究采用视觉监测人体的动作来更灵活地进行防御。
第二,协同作业方面,要么就是人与机器人在同一个工作空间,你干你的,我做我的;要么通过一些标准的信号交互,比如放在指定位置并通过IO的方式告诉机器人,或者机器人定期去固定的位置检测是否有指定的物体出现。
可以预测,在未来的机器人系统中,人体的肢体运动也受到实时监测,大到人体走动,小到人体伸出一个手指的动作都被系统捕捉到,机器人就可以预判人体的动作并做出相应的反应。
那么,要做到上述效果需要怎样的功能支持? 首先是视觉与机器人的集成,机器人不再是被动的在指定地点搜寻,而是“眼观四路、耳听八方”,只要进入视野内的物体都可以被捕捉到,所见即所得。
其次就是强大的智能图像处理能力,能自行搜寻所需目标。比如协作机器人+AGV的组合做物料的转运,当物料摆放位置随意时,机器人就可以采用搜寻动作,而不是拍个照看一下,再调整位置,再拍个图看一下。自动驾驶、人形机器人、大小狗也是如此。
再次,人机交互方面,从工业机器人的指令编程,到协作机器人的图形化编程,编程会越来越简单,代码会越来越少。
近期,大族机器人也发布了一个视频DEMO,人机交互变成了语音编程,相信当前的语音编程与早期的智能音箱相似,都是通过提取语言中的关键词来变成指令。而随着语音识别与人工智能的发展,语音编程必然流行起来。并且,如果更人性化一点,通过与某个人的长期合作,机器人也许可以通过合作者的面部反应给出相应的反馈以完成合作。
如果再往远了想,当脑机技术成熟时,那人机交互更是一切尽在不言中。不过,是脑机技术先出来,还是开头的万物皆可打印先出来,谁知道呢。
最后说两句
协作之火,颇有燎原之势,但这并非毁灭之火,而是新生之火,最终促进的是机器人这一整个大的品类往安全化、模块化、智能化发展。未来的机器人,不管是否存在协同作业,都必然是安全的机器人。 而对国产机器人来说,不管是工业机器人还是协作机器人,我们仍处于起步阶段,小步快走,利用近水楼台的产业优势逐步缩小差距才是正途!
责任编辑:lq
-
工业机器人
+关注
关注
90文章
3262浏览量
91888 -
协作机器人
+关注
关注
2文章
466浏览量
29932 -
3D打印
+关注
关注
26文章
3472浏览量
107653
原文标题:“协作”在左,“工业”在右
文章出处:【微信号:gaogongrobot,微信公众号:高工机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
LabVIEW的六轴工业机器人运动控制系统

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
华数机器布局工业协作机器人,发布多款工业协作机器人新品

ai人工智能机器人
基于Matlab和VR技术的移动机器人建模及仿真
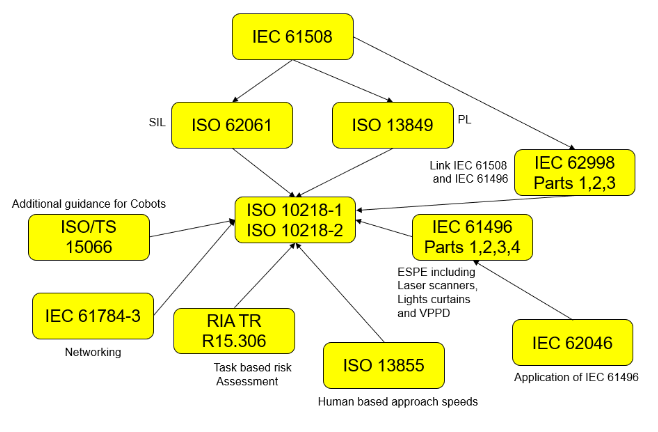
与工业机器人、协作机器人和移动机器人最相关的功能安全标准





 工商网监
工商网监
评论